卫星导航定位技术综述
2014-01-10庄春华赵治华张益青罗巧梅
庄春华,赵治华,张益青,罗巧梅
(北京环球信息应用开发中心,北京 100094)
1 引言
近年来,无线通信、网络、嵌入式计算、无线传感网以及其它技术的飞速发展,使得人们生活的三维物理空间中充满了海量的数据和信息,促使位置服务的功能从原有的定位服务(Where am I?)、位置感知服务(Where are you?)向情景感知服务(Context aware service?)发展。具有无缝位置服务的普适计算(ubiquitous computing或者pervasive computing)平台,将使人们可以在生活和工作环境中随时、随地得到位置信息和服务,无缝定位技术将在现代社会生活中发挥着日益重要的作用[1]。
无缝定位技术是指在人类活动的地上、地下空间和外层空间范围内,能够联合采用不同定位技术以达到对各种定位应用的无缝覆盖,同时保证各种场景下定位技术、定位算法、定位精度和覆盖范围的平滑过渡和无缝连接。它是当前无线定位技术研究的热点和难点,国内外学者在该领域进行了多年探索,但是到目前为止,还没有在任意真正信道环境下(尤其是在闹市区)满足高精度无缝定位要求的实用系统出现[2]。
本文对常用的室内外定位技术进行了介绍,总结了国内外专家学者在无缝定位技术、算法、系统等领域的研究成果,并对无缝定位技术面临的问题以及发展方向进行了探讨。
2 常用的室内外定位技术
无线定位技术有多种分类方式,按照定位所采用的基础设施的不同,定位技术可分为基于卫星的定位、基于射频信号的定位、基于自包含传感器的定位等三大类。图1给出了常用的室内外定位技术所用到的传感器[3]。
不同的定位技术由于使用的定位信号、定位方法不同,导致可获得的定位精度以及适用的环境存在较大差别。在实际应用中,需要根据定位精度、功耗、成本等具体要求进行选择。图2显给出了现有定位系统的定位性能、定位测量技术与应用环境[4]。
2.1 GNSS定位技术
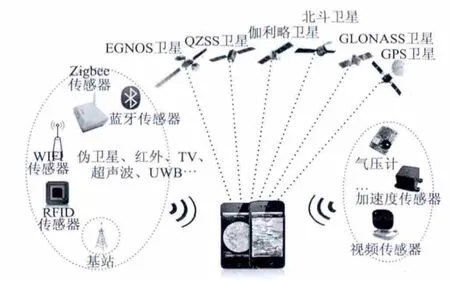
图1 导航系统卫星及常用的定位传感器
全球卫星导航系统(global navigation satellite systemGNSS 是所有在轨工作的卫星导航系统的总称[5]。GNSS定位的基本原理是测量出已知位置的卫星到用户接收机之间的距离,综合多颗卫星的数据交会出接收机的具体位置[6]。GNSS定位至少需要接收到4颗卫星信号才能求解出自身坐标,在空旷的室外环境中,终端可以畅通无阻地接收到足够的卫星信号实现高精度定位。但是在城市峡谷区域,终端和卫星之间有高山、建筑物、隧道等物体或地面阻挡时,终端无法接收到4颗以上的卫星,就难以实现有效定位。
2.2 基于射频信号的定位技术
无线通信技术和各种无线传感器网络技术的发展,为无缝定位提供了基础和软硬件环境,利用射频信号技术实现定位已成为定位研究领域的发展趋势,主要无线定位技术有无线保真(wireless fidelity,WiFi)[7]、射频识别(radio frequency identification,RFID)[8]、超宽带(ultra wide band,UWB)[9]、伪卫星[10]、移动通信[11]、蓝牙(Bluetooth)[12]、紫蜂(ZigBee)[13]、红外线[14]、超声波[15]、电视(TV)信号[16]等来进行定位,表1为基于射频信号定位技术。
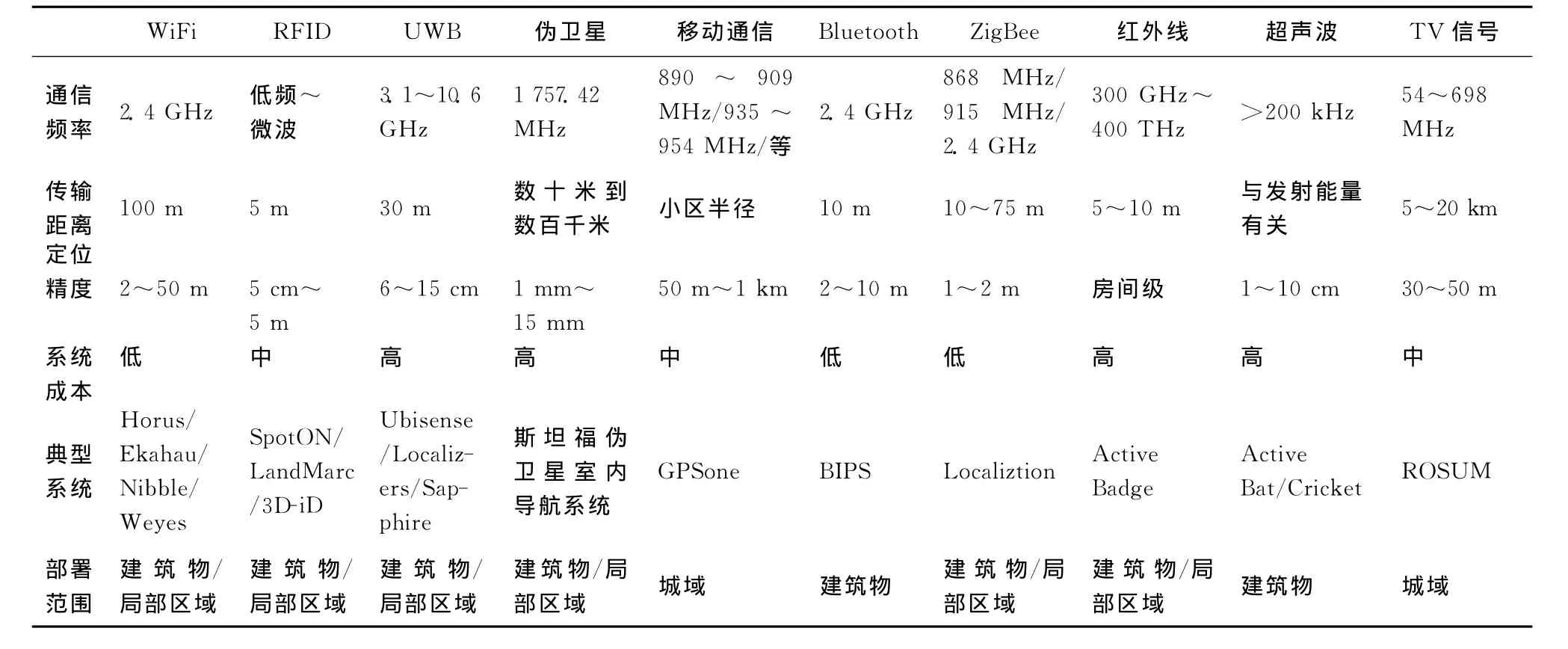
表1 基于射频信号的定位技术
2.3 基于自包含传感器的定位技术
基于射频信号的定位技术需要移动通信基站、无线网络接入点、信号发射塔或中继器等外部设施支持,和预先建立室内环境的接收信号强度指示(received signal strength indication,RSSI)数据库,增加了行人导航服务提供商的建设成本,而且用户只能在这种环境下获取位置信息,限制了导航的范围,而基于自包含传感器的定位技术具有导航定位自主性和连续性等优点。
最普遍的自包含传感器包括惯性传感器(加速度计和陀螺仪)磁罗盘、气压计和倾斜仪等,这些传感器也叫做航迹推算(dead reckoning,DR)传感器。另外借鉴移动机器人同步定位和制图(simultaneous location and mapping,SLAM)的原理,还可以引入视觉传感器[17]、和激光雷达[18]等传感器。基于不同的物理特性和应用环境,这些传感器可以相互组合实现不同的配置方案,如陀螺和加速度计组合的惯性导航系统,磁力计和加速度计组成的无漂移定位方法,陀螺仪、磁力计和加速度计冗余定位方法等。
3 无缝定位的关键技术
3.1 无缝定位体系结构
无缝定位体系结构主要涉及到无缝定位基础设施、统一坐标系、时间系统、通信设施和软硬件框架等方面。
无缝定位基础设施是指各种定位传感器网络基础设施的集合,包括GNSS的地面增强和连续跟踪站构成全球一体化的网络基础设施,城市的各种无线通信与电视广播基站,室内环境下已有的各种定位传感器网络设施等。这既包括利用现有的定位基础设施,也包括城市环境下的多种泛在无线信号源以及根据实际需要专门布设的各种小规模的定位传感器网络。无缝定位信息基础设施是建立无缝定位系统的基础,也是必要条件。
统一坐标系。按照现有的无缝定位基础设施层次,可以划分出若干个层级:全球框架、区域框架、城市框架、街区学校框架、单体建筑框架和楼层平面框架,依次由上一层坐标框架为下一层提供坐标基准,也可以采用空间信息网格作为支持。
时间系统。时间作为定位中重要的信息,可以按照统一坐标系的层级将GNSS提供的时间基准通过无缝定位基础设施进行分层时间传递服务,依次向下一级传感器网络提供时间基准。
通信设施。采用现有的各种通信网络设施以及无缝定位系统自身的通信功能,为各种服务应用和各种定位辅助信息的传递提供稳定的通信保障。
软硬件的框架。无缝定位硬件层面指不同接口之间的协同与集成,软件层面主要是定位软件的框架结构。
3.2 无缝定位的主要算法
无缝定位算法主要是针对多种无线定位技术,例如全球定位系统(global positioning system,GPS)、无 线 局 域 网 络(wireless local area networks,WLAN)、紫蜂(ZigBee)和超宽带(ultra wide band,UWB)等中多源定位观测量,例如RSSI、到达时间(time of arrival,TOA)、到达时间差(time difference of arrival,TDOA)和 小区识别码(cell identity,Cell-ID)以及其他类型的定位传感器(加速度和高度计等)的定位观测量构建统一的融合定位模型,包括多种技术共用模式下的自动切换集成以及平稳过渡等相关技术的研究;针对城市和室内复杂非视线传播环境下对各种无线信号定位产生影响的误差源进行鉴别和消除技术;以及在定位解算过程中需要运用到的数据处理技等。
3.2.1 常用的定位解算算法
基于测距的定位机制是通过测量相邻节点间的实际距离或方位进行定位。在基于测距方式解算算法中,测量节点间距离或方位时采取的方法有TOA,TDOA和到达角(arrival of angle,AOA)等,图3是基于测距的算法原理图。
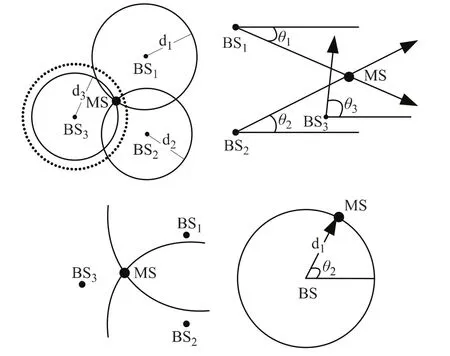
图3 基于测距的算法原理图
非测距的算法主要有传播模型法、位置指纹法、基于Cell-ID的定位方法、行人航迹推算(pedestrian dead reckoning,PDR)方法[19]等。
3.2.2 非视距误差源鉴别和消除算法
1)非视距消除算法
由于无线传感器网络发射的无线电波具有视距传输特性,故非视距传播是测距、测角定位系统的主要误差源,目前已提出的非视距(non line of sigh,NLOS)消除方法可以分为两大类,一类是误差模型法,一类是非模型法。误差模型法是利用信道模型假设出NLOS误差的分布。非模型法又可以分为利用测量数据空间冗余度;利用测量数据时间冗余度;利用几何约束三类[20]。
国内外学者提出的NLOS消除方法有误差模型 法[21]、散 射 体 模 型 重 构 法[22]、 残 差 比 对 法[23]、加权定位法[24]、几何约束法[25]、距离尺度因子法[26]、卡尔曼滤波重构法[27]等。NLOS误差传播问题已经成为目前定位技术研究的重点和难点问题,已经提出的各种NLOS误差消除算法,都是在各种假设和限定条件下提出的优化方法,到目前为止,还没有一种真正简单有效、广泛适用的非视距误差消除算法提出。如何鉴别并消除NLOS误差的影响,或提出符合NLOS误差分布规律的误差模型,提高定位的精度,是无缝定位技术广泛应用的关键[2]。
2)抗多径干扰估计算法的研究
在基于无线传感器网络定位系统中,多径干扰是影响定位精度的主要因素之一,寻找具有抗多径干扰能力的时延估计算法也是无线定位技术研究的重点。目前主要的抗多径干扰时延估计算法有基于扩展卡尔曼滤波的到达时间[28]、多径联合估计算法[29]、RAKE结构的 TDOA 估计器[30]、高分辨率抗多径干扰时延估计方法[31]、TLS-ESPRIT(total least squares version of estimation of signal parameters via rotational invariance technique)时延估计方法等[32]。
3.2.3 定位解算与精度评定算法
1)定位解算算法
目前定位解算算法研究比较成熟,主要的定位算法有基于最小二乘(LS)的定位求解算法[33]、二重最小二乘算法[34]、泰勒级数展开算法[35]、Fang算 法[36]、球面相交算法[37]和分类征服算法[38]。
2)定位精度评定方法
为了正确评价各种定位算法的定位性能,需要首先确定评价定位准确率的指标。目前最常用的指标是定位解均方误差(MSE)、均方根误差(RMSE)、克拉美罗下界(CRLB)、几何精度因子(GDOP)、圆误差概率(CEP)。累计分布函数(cumulative distribution function,CDF)也常被作为评价指标,CDF是指在某个精度门限下的定位结果的次数在总定位次数中所占的比例。其他的评价指标还有圆/球误差概率、几何精度因子(geometric dilution of precision,GDOP)和相对误差等。
3.2.4 多传感器数据融合算法
目前还没有一种通用的融合多传感器信息的方法,一般要根据具体的应用背景而定。在联合不同信息系统,处理来自不同传感器的信息时,按照信息层次,可以将信息融合分为三个层次,即底层的原始信息融合、中间层的目标级融合,以及高层的决策级融合[39]。图4为多传感器数据融合模式。
图4 多传感器数据融合
在无缝定位技术中,常用的信息融合算法主要有综合平均法、神经网络、加权最小二乘、卡尔曼滤波、贝叶斯估计、模糊逻辑法、D-S法(dempster shafter)、专家系统等。在进行多源、异构定位技术融合以实现无缝定位的研究中,信息融合的工作十分重要,除前述几种常用的信息融合方法,还有品质因数、模板方法、聚类分析以及统计决策等。
3.2.5 定位模式的切换准则
切换是指由于卫星的运行或用户的移动,使用户接收到的卫星数目或无线接入点发生变化的情况。实质就是定位模式重新选择的过程,对定位精度和定位可用性具有重要影响。切换不仅增加了定位系统中需更新的信息通信量,而且为定位程序的运行带来了额外的负担,因此需要对切换策略进行研究。图5为无缝定位切换基本情况。

图5 无缝定位切换基本情况
切换策略基本原则是具有较低的时延、较小的切换频率及较少的切换次数[40]。在组合定位系统中,可采用的切换准则主要以下几种:最大可用性准则、最大定位精度准则、最小负荷准则。
3.3 典型的室内外无缝定位系统
综合GNSS以及各种传感器,国内外研究机构已经推出了各种室内外无缝定位系统,部分系统已经得到实际应用。
其中Skyhook公司提出了混合定位系统XPS,XPS是基于软件的定位解决方案,定位时综合利用WiFi、GPS和蜂窝网络信息获得用户位置,其定位精度可达10~20m,是目前最成熟的无缝定位解决方案[41]。
满足美国联邦通讯委员会(Federal Communications Commission,FCC)的辅助全球定位系统(assisted global positioning system,A-GPS)和GPSone技术,这两种定位技术同时采用了无线通信网络信号和GPS卫星信号,改善了定位的可用性、灵敏性、精确度和定位耗时[42-43]。
日本宇宙开发局于2009年推出了新的室内精确定位系统(indoor messaging system,IMES),该系统通过一些预置在室内的信号发射器、移动设备中经过修改的内嵌固件、以及相应的信息服务器,组成了无缝的室内定位系统[44]。
国内的唐恩科技公司于2005年底开发出国内第一套民用UWB定位系统iLocate无缝定位系统,该系统集成了核心定位引擎,可以融合多种无线传感信号进行无缝定位[45]。
欧空局研发的室内全球导航卫星系统定位演示器(demonstrator for indoor GNSS positioning,DINGPOS)[46]联合使用了能在室内接收到GPS和伽利略信号的高灵敏度接收器和辅助定位传感器如加速器和陀螺仪传感器、WiFi等,并结合地图匹配技术可依据当前建筑的计算机模型综合本地现有的数据在室内外进行无缝定位。
国内的北京邮电大学研制了天地一体化的TC-OFDM定位与通信融合新型信号体制,构建了天地一体的室内外无缝定位体系,实现了基于移动通信网络的高精度室内外无缝定位与融合卫星导航的室外高精度定位,它水平定位精确到3m,高度定位精确到1m,能有效提高北斗系统的定位速度、精度、范围与核心竞争优势,满足北斗系统应用发展的迫切需求。
美国的WiFiSLAM公司采用结合WiFi网络的 “印迹”及手机内置的加速度计和指南针来进行定位,它能够在没有定位数据库信息的区域快速建立起定位服务,精度可达到所在位置的 “十几步”之内。通过导航的算法用来处理WiFi网络“印迹”和人的脚步的变换模式,在电脑系统中重现人曾走过的路途,随后那条踪迹会与建筑物的地图相结合,从而使WiFiSLAM告诉用户他们在这个环境中的所在位置。
4 无缝定位服务与应用模式
无缝定位服务面向的是广大的空间信息社会化用户群,无缝定位系统一旦构建实施,需要有足够的用户群体来支撑。无缝定位在系统服务层面要考虑到终端用户的各种需求,包括合适的定位精度和与之相匹配的电子地图显示模式,还要考虑定位服务和各种空间数据的服务与收费模式。
无缝定位应针对用户群体多样化的特征,要求在相应的电子地图显示模式和终端服务模式方面考虑到用户的实际需求,以最简单有效的可视化方式、快捷便利的定位技术来为用户提供可靠的空间信息数据服务。终端的接入模式也可以根据需要以用户终端为主,或者充分利用现有的无线通信网络的优势,将部分的数据服务以网络的形式提供给用户使用。此外,还应针对定位技术和服务进行一系列的标准化、组件化、网络化、自适应化、集成化、智能化等方面的研究。
5 无缝定位面临的挑战及发展方向
5.1 无缝定位技术存在的问题
无缝定位技术还面临以下几个问题:难以依靠单一的无线技术实现无缝定位,如GNSS技术无法在封闭空间发挥其高精度定位的特点;各种定位信号无法覆盖多个不同区域,需要解决室内外连接区域的无缝连接问题;无线信号在室内外NLOS传播环境下的复杂传播信道;无缝定位系统所需的统一的坐标和时间系统、基础设施和软硬件成本、合适的移动定位设备、标准化问题;公众无线服务的定位服务模式;其他诸如支持开放式服务的应用编程接口(application programming interface,API)、电源、隐私安全等问题[47]。
5.2 无缝定位算法研究重点
(1)进一步研究基本定位方法和定位算法,提出新的定位方法和原理,重点研究定位算法的抗NLOS和抗多径、多址干扰能力。
(2)在现有定位算法研究基础上,深入研究影响定位精度的主要误差源,尝试建立符合实际的误差模型或对影响定位精度的误差统计特性进行适当假定和合理描述;重点研究如何减少或消除NLOS传播和多径干扰对定位精度的影响。
(3)针对影响时延估计精度的多径干扰问题,重点研究在蜂窝移动信道环境下的抗多径时延估计算法,提高时延估计的准确度。
(4)充分利用现有的各种定位方法和定位数据进行综合或数据融合定位。
5.3 无缝定位发展趋势
(1)开展导航与位置服务技术研究,突破GPS/北斗系统双系统高精度软硬件接收机关键技术,通过与电子罗盘、惯性导航与地图匹配技术相融合,开发出城市道路和高遮挡地区不间断定位和导航的软硬件系统。
(2)以无线 WiFi、蓝牙、空气声学定位、惯性导航和环境场匹配技术为基础,在无线定位中融入光学、惯性、电磁场和超声波等技术,通过多传感器集成和数据融合算法的研究,研究出性价比高的室内定位系统。
(3)突破GNSS技术与地面移动通信网、无线互联网、地面物联网、室内地下导航定位系统之间高可靠性通讯技术和方法,实现室内外、地上地下无缝、高精度、高可用性的空间定位。
(4)减少定位算法对前期环境勘测的依赖,进一步提高定位准确性及速度,实现系统的软件层替代原本硬器件完成的功能,即硬件功能的软件无线电化。利用各种认知的无线电技术如无线频谱感知技术来提升泛在无线信号在无缝定位中所发挥的作用。
[1] 陈璋鑫.LOS/NLOS无线定位方法研究[D].成都:电子科技大学,2009.
[2] 甄杰,张淑芳.蜂窝移动定位系统定位精度提高算法的研究进展[J].电讯技术,2004(6):9-10.
[3] 陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科技大学,2010.
[4] 罗海勇,朱珍民,张波,等.多模定位技术[J].信息技术快报,2010,8(5):23-24.
[5] 刘基余.GNSS全球导航卫星系统的新发展[J].遥感测控,2007,28(4):1-6.
[6] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005:33-37.
[7] CASTRO P,CHIU P,KREMENEK T,et al.A Probabilistic Room Location Service for Wireless Networked Environments[EB/OL].[2013-11-25].http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.3.6233&rep=rep1&type=pdf.
[8] NI L M,LIU Yun-hao,LAU Y C,et al.LANDMARC:Indoor Location Sensing Using Active RFID[EB/OL].[2013-11-25].http://www.stitcs.com/en/RFID/Indoor%20Location%20Sensing%20Using%20Active%20RFID.pdf.
[9] OPSHAUG G R,ENGE P.Integrated GPS and UWB Navigation System:Motivates the Necessity of Non-interference[C]//Proceedings of 2002IEEE Conference on Ultra Wideband Systems and Technologies.Baltimore:[s.n.],2002:123-127.
[10] ELROD B,BARLTRO P K,VAN DIERENDONCK A J.Testing of GPS Augmented with Pseudolites for Precision Approach Applications[C]//Proceedings of the 7th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GPS 1994).Salt Lake City:[s.n.],1994:1269-1278.
[11] CAFFERY J,STUBER G L.Overview of Radio Location in CDMA Cellular Systems[J].IEEE Communications Magazine,1998,36(4):38-45.
[12] Blip Systems.Bluetooth and Wi-Fi Tracking Measure,Optimize and Improve[EB/OL].[2013-11-25].http://www.blipsystems.com/urban/area-of-operations/.
[13] SUGANO M,KAWAZOE T,OHTA Y,et al.Indoor Iocalization System Using RSSI Measuremen to Wireless Sensor Network Based on Zigbee Standard [EB/OL].[2013-11-25].http://citeseerx.ist.psu.edu/viewdoc/download?rep=rep1&type=pdf&doi=10.1.1.105.4355.
[14] WANT R,HOPPER A,FALCǍO V,et al.The Active Badge Location System[J].ACM Transactions on Information Systems,1992,10(1):91-102.
[15] HARTER A,HOPPER A,STEGGLES P,et al.The Anatomy of a Context-aware Application[EB/OL].[2013-11-25].http://www.cl.cam.ac.uk/research/dtg/www/publications/public/ah12/acaa.pdf.
[16] 祝曙光.卫星导航系统及产业发展趋势研究[J].数字通讯世界,2010(1):34.
[17] FARLEY G,CHAPMAN M.An Alternate Approach to GPS Denied Navigation Based on Monocular SLAM Techniques[C]//Proceedings of the 2008National Technical Meeting of The Institute of Navigation.San Diego:[s.n.],2008:810-818.
[18] WEIMANN F,ABWERZGER G,HOFMAN-WELLENHOF B.A Pedestrian Navigation System for Urban and Indoor Environments[C]//Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GNSS 2007).Fort Worth:[s.n.],2007:1380-1389.
[19] LEVI R,JUDD T.Dead Reckoning Navigational System Using Accelerometer to Measure Foot Impacts:USA,US5583776A [P].1999-07-26.
[20] 蒋非颖.无线蜂窝网中抗NLOS定位与跟踪技术研究[D].成都:电子科技大学,2006:6-7,21.
[21] AL-JAZZAR S,CAFFERY J Jr.ML&Bayesian TOA Estimation for NLOS Environments[EB/OL].[2013-11-25].http://www.vtvt.ece.vt.edu/research/references/uwb/ranging_mobile_location/ml_bayesian_toa.pdf.
[22] LIN Liu,PING Deng,PING Zhi-fan.A TOA Reconstruction Method Based on Ring of Scatters Model Parallel and Distributed Computing,Applications and Technologies[C]//Proceedings of the Fourth International Conference on PDCAT.Chengdu,China:[s.n.],2003:375-377.
[23] WYLIE M P,HOLTZMAN J.The Non-line-of-sight Problems in Mobile Location Estimation[EB/OL].[2013-11-25].ht-tp://www.vtvt.ece.vt.edu/research/references/uwb/ranging_mobile_location/nlos_problem_mobile_location.pdf.
[24] CHEN Pi-chun.A Non-line-of-sight Error Mitigation Algorithm in Location Estimation[C]//Proceedings of IEEE Wireless Communications and Networking Conference.New Orleans:[s.n.],1999:316-320.
[25] VENKATRAMAN S,CAFFERY J,YOU H.A Novel TOA Location Algorithm Using LOS Range Estimation for NLOS Environments[J].IEEE Transactions of Vehicular Technology,2004,53(5):1515-1524.
[26] VENKATRAMAN S,CAFFERY J,YOU H.Location Using LOS Range Estimation in NLOS Environments[C]//Proceedings of the 55th IEEE Vehicular Technology Conference.Birmingham:[s.n.],2002:856-860.
[27] THOMAS N J,CRUICKSHANK D G M,LAURENSON D I.A Robust Location Estimator Architecture with Biased Kalman Filtering of TOA Data for Wireless Systems[C]//Proceedings of IEEE 6th International Symposium on Spread Spectrum Techniques and Applications.Parsippany:[s.n.],2000:6-8.
[28] ILTIS R A,SANTA B.Joint Estimation of PN Code Delay and Multi-path Using the Extended Kalman Filter[J].IEEE Transactions on Communications,1990,38(10):1677-1685.
[29] ILTIS R A,MAILAENDER L.An Adaptive Multi-user Detector with Joint Amplitude and Delay Estimation[J].IEEE Journal on Selected Areas in Communications,1994,12(5):774-785.
[30] 朱良学,朱近康.一种 RAKE结构的 TDOA估计器及其最优合并方法[J].通信学报,2003,24(1):66.
[31] DUMONT L,FATTOUCHE M,MORRISON G.Super-resolution of Multi-path Channels in a Spread Spectrum Location System[J].Electronics Letters,1994,30(19):1583-1584.
[32] SAARNISAARI H.TLS-ESPRIT in a Time Delay Estimation[C]//Proceedings of IEEE 47th Vehicular Technology Conference.Phoenix:[s.n.],1997:1619-1623.
[33] FRIEDLANDER B.A Passive Localization Algorithm and Its Accuracy Analysis[J].IEEE Journal of Oceanic Engineering,1987,12(1):234-245.
[34] CHAN Y,HO K.A Simple and Efficient Estimator for Hyperbolic Location[J].IEEE Transactions on Signal Processing,1994,42(8):1905-1915.
[35] FOY W H.Position-location Solutions by Taylor-series Estimation[J].IEEE Transactions on Aerospace and Electronic Systems,1976,12(3):187-194.
[36] FANG B T.Simple Solutions for Hyperbolic and Related Position Fixes[J].IEEE Transactions on Aerospace and Electronic Systems,1990,26(9):748-753.
[37] SCHAU H,ROBINSON A.Passive Source Location Employing Intersecting Spherical Surfaces form Time of Arrival Different[J].IEEE Transactions on Acoustics Speech and Signal Processing,1987,25(8):1223-1225.
[38] WEINSTEIN E.Decentralization of the Gaussian Maximum likelihood Estimator and Its Applications to Passive Array Processing[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1981,29(5):945-951.
[39] 李正强,王宏力,杨益强,等.信息融合技术在组合导航系统中的应用[J].飞行力学,2006,24(1):89-92.
[40] 张历卓,贾维嘉,周仕飞.基于邻居表的滑动平均值切换策略研究[J].小型微型计算机系统,2009,30(12):2311-2314.
[41] Skyhook Wireless Inc.Skyhook Location Performance.[EB/OL].[2013-11-25].http://www.skyhookwireless.com/location-technology/performance.php.
[42] PORCINO D.Location of the third Generation Mobile Devices:a Comparison between Terrestrial and Satellite Positioning Systems[C]//Proceedings of IEEE 53rd Vehicular Technology Conference.Rhodes:[s.n.],2001:2970-2974.
[43] SOLIMAN S,AGASHE P,FERNANDEZ I,et al.GPS oneTM:A Hybrid Position Location System[EB/OL].[2013-11-25].http://www.cs.columbia.edu/~drexel/CandExam/Cellular/Soliman2000_gpsOne.pdf.
[44] 室内定位也精确日本将推IMES定位系统[J].安防设计,2009(6):39-39.
[45] 南京大学常州高新技术研究院.新型定位技术[EB/OL].[2013-11-25].http://www.njucz.cn/productsshow.asp?id=3.
[46] VECCHIONE G A,PALENZUELA D,TOLEDO M,et al.DINGPOS,a GNSS-based Multi-sensor Demonstrator for Indoor Navigation:Preliminary Results[C]//Proceedings of IEEE/ION PLANS 2010.Indian Wells:[s.n.],2010:113-121.
[47] 田辉,夏林元,莫志明,等.泛在无线信号辅助的室内外无缝定位方法与关键技术[J].武汉大学报:信息科学版,2009,34(11):1372-1374.