线阵CCD卫星图像自适应条带噪声去除
2013-12-31焦彦平
焦彦平, 李 唱
(1.装备学院 科研部,北京101416; 2.装备学院 研究生管理大队,北京101416)
条带噪声普遍存在于星载、机载多传感器和单传感器光谱仪成像中,它是卫星在传感器光、电器件扫描地物的成像过程中,由于传感器的响应不均匀造成的原始数据在一定方向上出现的灰度值连续偏高或偏低。条带噪声和普通的斑点噪声混杂在一起,掩盖了图像真正的辐射信息,使图像的质量降低,给图像判读带来困难,严重影响遥感数据的应用效果。
以沿轨扫描CCD相机为例,由于多传感器的工艺差异、仪器及元件的老化和内部校准系统的微小误差等原因导致各个探测单元的转换传递函数不同,从而造成传感器的电子装置性能及对电磁辐射响应的差异,这种条带噪声与扫描方向有关且呈周期分布,称为周期条带。针对传感器之间的周期条带问题,许多学者已经进行了研究和探讨,如Kautsky等[1]的图像灰度值特征匹配方法 和Wegener[2]改 进 的 直 方 图 匹 配 法,Gadallah[3]提出的矩匹配方法以及频率域滤波法[4],小波分析法[5],有限脉冲响应过滤[6],基于最小二乘的非线性映射[7]等。以上的方法都是在默认条带噪声周期性分布和忽略点噪声影响的前提下进行的。相对频率滤波方法,空域法具有运算速度快的优点。本文主要基于空域法,在分析线阵CCD卫星原始数据条带噪声图像特性的基础上,采用基于灰度统计的自适应滤波方法,对线阵CCD卫星(BJ-1卫 星 和CBERS-02卫 星)原 始 数 据 进 行条带噪声去除。实验证明,该方法能有效地抑制线阵CCD过饱和现象对条带噪声滤波图像的影响,具有较好的滤波特性。
1 基于自适应滤波的线阵CCD卫星图像条带噪声去除
1.1 直方图匹配条带噪声滤除
含有条带噪声的CCD图像模型[8]可表示如下:gij=Sij+R(i,Sij)+Nij。式中,gij表示原始图像第i行第j列的像素灰度值,CCD沿行扫描,所以i也表示CCD的第i个像元。gij由3个部分组成:Sij表示信号的入射幅度;Nij表示点噪声;R(i,Sij)表示条带噪声,其大小受当前CCD像元特性和入射幅度的共同影响。空间域条带噪声去除,采用图像列灰度特性与全图像的灰度统计特性匹配的方法。即

式中:M为整个图像所有像元灰值的平均值;D为整个图像所有像元数灰度值的标准偏差;mi为每条扫描线上像元灰度平均值;di为每条扫描线上像元灰度的标准偏差,且:

以上各式中的i,j表示图像行列顺序号,其中i=1,2,…,L;j=1,2,…,S。
通过上述灰度统计特性的匹配,每一列的灰度统计特性同全图像的灰度统计特性相一致,因此消除了不同列CCD器件采集时响应特性和噪声不同而带来的条带噪声。
1.2 线阵CCD卫星图像噪声特性分析
线阵CCD卫星通常具有红、绿、蓝、近红外多个波段,其原始图像的纵向条带噪声较为突出。对于自然景物所获取的卫星图像,各波段的直方图基本符合正态分布,其噪声特性具有以下特性:①图像信噪比较高。②图像内部的CCD产生的条带噪声周期性显著,呈显著变化的明暗交替特征;在CCD拼接处,出现拼接引起的条带噪声。③在遥感图像的采集过程中,由于受云层及地面积雪的影响,线阵CCD出现过饱和现象,图像中会出现局部白色斑块及外晕,在白斑内部及外晕上,无明显的条带噪声。
由于白色斑块对图像行、列的灰度统计特性(灰度平均值,方差)影响较大,使用1.1节中的空间域条带噪声滤除,在条带噪声去除的图像上会呈现局部带状效应。带状效应所对应的区域内,除局部白色斑块外,列向图像明显偏暗且呈灰色。
1.3 线阵CCD卫星图像条带去噪方法
为避免由于局部过饱和现象而导致的滤波后图像的局部带状效应,在图像条带噪声去除前,采用自适应方法找出图像中的局部过饱和区域灰度临界值t,当图像灰度大于灰度临界值时,图像灰度值不参与列灰度特性统计;反之,则参与列灰度特性统计。
1.3.1 灰度临界值t的确定
步骤1 将线阵CCD自然景物图像灰度分布假设为正态分布N(M,D),经统计分析,满足光学遥感图像云量<10%的BJ-1和CBERS-02自然景物图像,图像过饱和区域灰度通常集中在图像的[2.5D,255]区域内,设定灰度临界初始值t0=kD,k=2.5。(t0的确定,与卫星无关,而与具体的地物密切相关,与图像中云、雪等过饱和区域所占的比例有关。本文综合考虑到地物特征和算法的效率,设定t0=2.5D。)
步骤2 不考虑图像中灰度值大于灰度临界值t0的像素,对图像剩余像素进行灰度平均值M′和方差D′的统计,若|M-M′|>1,则k增加0.1。
步骤3 重新设定t0=kD,重复步骤2,直至|M-M′|≤1。
步骤4 灰度临界值t=t0。
1.3.2 基于灰度临界值t的条带噪声去除
基于灰度临界值t空间域条带噪声去除,采用图像列灰度特性与全图像的灰度统计特性匹配的方法。即

式中:M为整个图像所有像元灰值的平均值;D为整个图像所有像元数灰度值的标准偏差;mi(t)为每条扫描线上像元灰度小于临界值t的像素的灰度平均值;di(t)为每条扫描线上像元灰度小于临界值t的像素的灰度标准偏差。且

式中S(t)为i行中满足条件的像素总数。

通过灰度统计特性的匹配,在图像过饱和区域对应列的灰度统计特性与全图像的灰度统计特性相比明显不同,灰度平均值大于全图平均值;不包含图像过饱和区域的像素时,其对应列的灰度统计特性与全图像的灰度统计特性一致,有效地去除了局部带状效应。
2 实验分析
实验数据选取线阵CCD卫星条带噪声明显的波段图像,图1(a)为BJ-1 015028_1近红外波段原始图像,图2(a)为CBERS-02红波段原始图像,条带噪声明显。图1(b)~图1(d),图2(b)~图2(d)分别为图1(a)和图2(a)基于直方图匹配、频域滤波[9]和基于自适应滤波的卫星图像条带噪声去除处理结果。
图3(a)~图3(d)、图4(a)~图4(d)比较了BJ-1、CBERS-02图 像 条 带 噪 声 去 除 前 后 沿 轨(列)方向的像素均值。

图1 BJ-1 015028_1近红外波段及条带噪声去除后结果图像

图2 CBERS-02红波段及条带噪声去除后结果图像
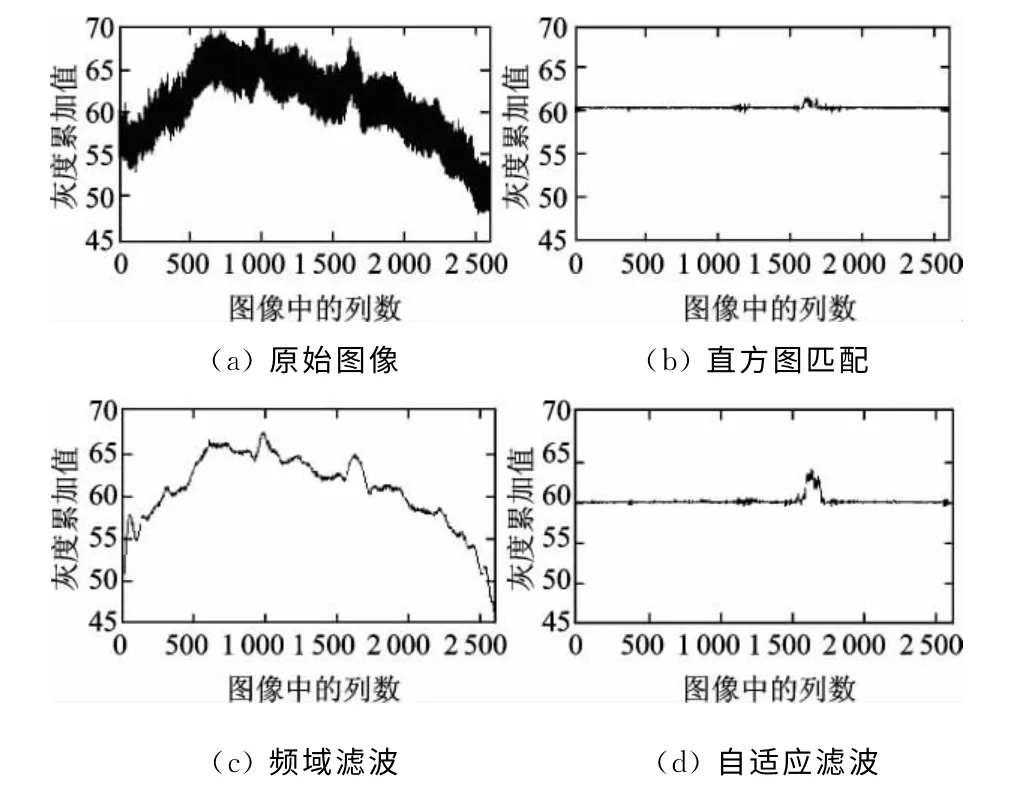
图3 BJ-1条带噪声去除前后图像列均值曲线

图4 CBERS-02条带噪声去除前后图像列均值曲线
为了定量化分析图像的改善质量,采用3项噪声图像的质量改进指标进行统计分析,它们分别是图像的均值、标准差和处理前后图像的变差倒数[10](inverse coefficient of variation,ICV)(记作RICV)。实验中,变差倒数是通过图像内2个10像素×10像素大小的均匀区域计算得到的,公式为

式中:Ra为给定窗口大小内的图像像素的均值;Rsd为给定窗口内的图像像素的标准差。RICV值越大,图像条带噪声滤除的效果越好,表1为BJ-1图像处理前后变差倒数对照表,表2为CBERS-02图像处理前后变差倒数对照表。

表1 BJ-1图像处理前后变差倒数对照表

表2 CBERS-02图像处理前后变差倒数对照表
3 结 束 语
线阵CCD成像原理决定了在图像中存在多种条带噪声,包括CCD传感器响应不同造成的条带噪声和CCD拼接造成的拼接条带噪声。条带噪声的存在降低了图像的判读质量。本文基于线阵CCD条带噪声的特点,提出了基于自适应滤波的条带噪声去除方法,该方法主要弥补了直方图匹配条带噪声去除算法在图像过饱和区域对应列出现的“暗带状条纹”的不足,在消除列向条带噪声的同时均衡了各块CCD线阵响应。基于BJ-1卫星和CBERS-02卫星原始图像的条带噪声去除试验表明,该方法对条带噪声去除效果良好。
(
)
[1]KAUTSKY J,NICHOLS N K.Smoothed histogram modification for image processing[J].J.Comput.Vis &Image Process,1984,26:271-291.
[2]WEGENER M.Destriping multiple sensor imagery by improved histogram matching[J].J.Remote Sensing,1999,20(5):859-875.
[3]GADALLAH F L,CSILLAG F.Destriping multisensor imagery with moment matching[J].J.Remote Sensing,2000,21(12):2505-2511.
[4]SRINIVASAN R,CANNON M,WHITE J.Landsat data destriping using power filtering[J].Opt.Eng.,1988,27(11):939-943.
[5]TORRES J,INFANTES O.Wavelet analysis for the elimination of striping noise in satellite images[J].Opt.Eng.,2001,40(7):1309-1314.
[6]SIMPSON J J,STITT J R,LEATH D M.Improved finite impulse response filters for enhanced destriping of geostationary satellite data[J].Remote Sens.Environ,1998,66(3):235-249.
[7]CHOI E,KANG M G.Striping noise removal of satellite images by nonlinear mapping[J].Image Analysis and Recognition,2006(4142):722-729.
[8]CORSINI G,DIANI M,WALZEL T.Striping removal in MOS-B data[J].IEEE Trans.Geoscience and Remote Sensing,2000(38):1439-1446.
[9]孙颖,张志佳.基于频域滤波的自适应条带噪声去除算法[J].仪表技术与传感器,2006(2):57-59.
[10]NIEHOL J E,VOHORA V.Noise over water surfaces in Landsat TM images[J].J.Remote Sensing,2004,25(11):2087-2094.
