协同小卫星系统和服务
2013-12-29林来兴
林来兴
(北京控制工程研究所,北京 100190)
1 引言
现代小卫星问世已经近30年,在应用方面,多颗小卫星组成系统协同工作是其最大的特点,同时也是最有发展前途的,既能发挥小卫星最大优势,同时又能克服当前小卫星存在的一些缺点。为此本文提出协同小卫星系统和服务的概念,简称5S(Synergic Small Satellites Systems and Services)。
本文首先论述“协同小卫星系统和服务”的概念和内涵;其次讨论5S主要内容,特别是针对小卫星星座和编队飞行的设计特点及其性能;最后研究它们在各方面的服务(应用)。
2 S系列概念的由来与发展
S系列概念最早起源于20世纪80年代出现的小卫星(Small Satellite,2S),当时由于世界冷战和军事需求,火箭运载能力迅速提高,卫星应用也随着扩大。在原有技术基础上,卫星功能越来越复杂,总质量越来越大(达到十几吨),成本越来越高(十几亿美元),研制周期越来越长(十几年)。与此同时,计算机、电子、信息技术得到迅速发展,技术水平不断提高,而其产品尺寸越来越小,质量越来越轻,成本越来越低,大大促进空间技术的改革,从而带动小卫星(2S)技术的兴起。
20世纪80年中期国际上兴起小卫星热。各国开始大力研制小卫星系统,小卫星各系统包括小卫星有效载荷、平台及小卫星发射运载工具,于是就出现小卫星系统(Small Satellites Systems,3S)的概念。3S最典型事件就是1987年在美国犹他州大学召开的世界第一次小卫星会议,后来该会议每年召开一次至今已连续不断召开了27届,且参加人数和提交论文数量逐年增加,可见这股小卫星热经久不衰。经过这几年对小卫星系统不断研制,成功发射,并开始在许多领域得到良好应用,小卫星优势逐步显露出来,其优势是质量轻、成本低、研制周期短和技术性能能满足应用要求。
20世纪90年代中期又出现由小卫星系统(3S)的概念升级为小卫星系统与服务(Small Satellites Systems and Services,4S)的概念,它不仅强调重视小卫星系统研制,而且大力开发小卫星在各个领域的服务(应用),特别是在对地观测领域。4S最典型事件就是从1994年起,欧洲航天局(ESA)在欧洲举办4SSymposium 会议,每两年一次,至今已经召开了10次研讨会。小卫星对地观测,特别是光学成像系统取得突破性的成就,20年来光学成像分辨率提升了3个数量级,空间分辨率可达0.5~0.7 m,小卫星质量为200~250kg,即使是微波雷达小卫星其空间分辨率也达到1m 左右,质量小于300kg。
虽然小卫星系统具有上述一系列优势,而且也取得很好的应用成果,但是仍然存在一些固有缺点。为此本文提出5S概念,采用多颗协同小卫星组成系统与应用,5S既能充分发挥小卫星优势,同时又能克服小卫星存在的缺陷。
3 协同小卫星系统和服务(5S)概念和内涵
协同小卫星系统的定义是:由多颗(2颗或2颗以上)小卫星按一定要求分布在1种或多种轨道上,共同协作完成某项空间飞行任务(例如:观测、通信、侦察、导航等),从而使空间飞行获得更大的应用价值。这一概念类似分布式小卫星系统和应用,但是两者也有区别:分布式小卫星系统仅指小卫星的空间几何分布,而协同小卫星系统是从结构功能来定义的。前者仅能说明多颗小卫星处在分开状态工作;后者不仅包括了分布式概念,而且各颗小卫星相互协同配合一起工作,重点强调是协同合作。协同小卫星系统有两种型式:同构和异构。同构是指在协同多颗小卫星系统中,每颗小卫星结构与质量基本相同,例如“铱星”和“全球星”通信卫星星座;异构是指组成系统的每颗小卫星结构与质量均不相同,例如对地观测系统观测上午星座、下午星座和美国研制的F6编队飞行(现该项目已取消)。协同多颗小卫星系统的主要内涵如图1所示。有关编队飞行(Formation Flying)、星座(Constellation)和星群(Cluster),它们的定义与内涵参阅文献[1]。

图1 协同小卫星系统Fig.1 Synergic small satellites systems
小卫星分类有三种:①小卫星质量在200~500kg(狭义),或者200~1000kg(广义);②微小卫星质量在几十千克量级;③纳型卫星(由多个立方体星组成)重量几千克。
根据协同小卫星系统服务(应用)种类(星群、星座和编队飞行)与小卫星分类(小卫星、微小卫星和纳型卫星),当前协同小卫星系统适用范畴与概况如表1所示。

表1 协同小卫星系统和服务(应用)概况Table 1 Overview of synergic small satellites systems and services(application)
当前与过去,星群大部分用于空间环境参数的观测任务,因为卫星工作有一定寿命,在这段时间内卫星因轨道摄动引起卫星的位置变化不影响任务完成,例如ESA 的四颗星组成的星群(Cluster-1,2,3,4)用来观测地磁场分布与变化。由于星群比较筒单,目前相对来说应用范围也较少,为此下面仅讨论小卫星星座和编队飞行的特性以及它们在各领域中新的应用。从表1可看出目前小卫星在星座应用方面技术是最成熟的,小卫星编队飞行目前还处在研究试验阶段,为此下面将重点讨论小卫星星座技术。
4 小卫星星座
4.1 概述
星座概念出现在空间应用比较早,早在20世纪70年代美国发射了3颗“子午仪”导航卫星星座,后来美国又建立了全球导航卫星系统(GPS)。仅20世纪80、90年代全球建立的通信卫星星座就有十几个,目前现代导航卫星星座建成和正在建设的就有4个。但是这些星座的卫星质量都较大,建成周期很长、投资费用很高。小卫星星座应用广泛,投资小,建成周期短。为此更加被世人所关注。有关星座分类、星座设计详见文献[1],现将星座设计性能、星座位置控制等分述如下。
4.2 星座性能分析
由于星座应用范围很广,它们的技术性能按不同用途简述如下[2]:
1)卫星通信星座
对于卫星通信星座,有以下几方面的性能:
(1)卫星对地覆盖范围与时间;
(2)地球覆盖统计(对一个特定的地点或区域最小/平均/最大覆盖可见度,以及对任何网络节点或全球覆盖旳间隙);
(3)数据中继系统(DRS)的地面站和/或用户的可见性等;
(4)多普勒效应;
(5)仰角(网络节点或信息系统轮廓);
(6)卫星和用户天线分析(视场,指向角和覆盖角度,增益模式)和运动状态(仰角和方位角随时间变化的函数);
(7)星间链路(ISL)设置,能见度演变和链路预算;
(8)链路的可用性和可靠性;
(9)链路预算分析和信号质量;
(10)系统之间和系统内部之间的干扰问题。
对一个具体卫星通信星座来说,以上指标无须均等对持,可以根据总体要求有所取舍。
2)对地观测星座
最常见对地观测星座的质量因素:
(1)在任何区域或全球范围内的最大/最小/平均覆盖率(覆盖百分比)和重访时间;
(2)遥感器占空比(每轨道数据采集时间);
(3)对各种遥感器和天线在区域、数据中继系统(DRS)和地面站的可见度
(4)数据的实时性/延迟(时间间隔是指从遥感器数据采集到用户接口);
(5)在任何地点或全球范围内最大/最小/平均的响应时间;
(6)照明条件(星食分析)和太阳几何学(如某地太阳高度角)。
3)地面表面覆盖分析
地面表面覆盖性能是对地观测星座的一个重要技术指标,它与4个参数有关:覆盖面积、卫星轨道高度、卫星数量和重访时间。这个最佳技术指标没有唯一解,因为相关参数太多,只能有特解。图2表示全球覆盖在轨道高度固定条件下,重访时间与卫星数量的关系。在固定覆盖区域前提下,要求一定重访时间,卫星轨道高度越高,卫星数量越少,但是空间分辨率越低。图2采用Walker星座设计方法,同时沿滚动轴遥感器左右侧摆45°,以扩大覆盖宽度[3]。

图2 全球覆盖在不同轨道高度时固定重访时间与卫星数量关系Fig.2 Correlation between the revisiting time and satellite number
4)遥感器覆盖性能
星座性能与遥感器覆盖性能有着非常密切的关系,一个良好的星座性能必须配置一个适合覆盖性能的遥感器。举例说明,某火灾监视星座的监视区域为北纬35°~45°,西经10°~东经30°,覆盖面积约为200万平方千米,最大重访时间不超过25 min。该火灾监视星座需要由12颗小卫星平分在3个轨道平面组成,轨道高度为700km 的圆轨道,轨道倾角为47.5°[4]。图3表示火灾监视器视场和覆盖宽度。监视器可以左右摆动(如图3所示),最大覆盖宽度为2500km。
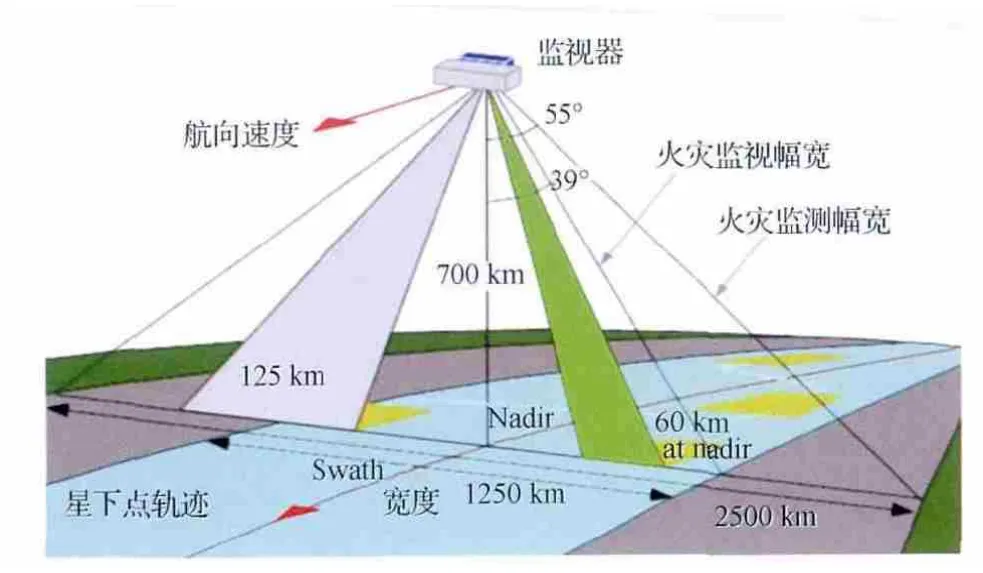
图3 火灾监视器视场和覆盖宽度Fig.3 Field of view of fire monitors and coverage width
在上述条件下重访时间与纬度关系如图4 所示。从图4得知:最大和平均重访时间在北纬35°~43°满足25min要求,而平均重访时间可扩展至北纬30°~50°。

图4 重访时间与纬度关系Fig.4 Relations between revisiting time and longitude
4.3 星座位置保持
4.3.1 星座位置保持概述
(1)目的:为了保持星座队形结构,以确保在其整个设计寿命标称的服务水平。
(2)范围和方法:处理长期轨道偏差和相应处理算法;选择最佳机动时间,约束条件为最大限度地减少轨道操作总数,最大限度地减少燃料消耗(减少所需速度增量ΔV),确保燃料预算在工作寿命期间满足需要。
(3)支持分析能力:利用星座轨道动力学模型和软件,进行长期星座轨道演化仿真实验,例如,找出轨道操作最佳次数;选择轨道确定方法,例如多普勒,星载多普勒无线电定轨定位(DORIS),GPS,车载雷达等。
4.3.2 轨道摄动分析
1)存在摄动差则需要星座位置保持
低轨道星座:大气阻力摄动,地球偏平J2项摄动,日月摄动;中高轨道星座:地球偏平J2摄动,太阳辐射压力,日月摄动(特别是卫星轨道高度大于10 000km 时);大椭圆轨道星座:地球偏平J2摄动,日月摄动和太阳辐射压力,近地点周围大气阻力。
2)星座长期演变分析
最低轨道高度影响星座的寿命;轨道形状偏差影响半长轴和偏心率;轨道空间构型偏差影响轨道平面的节点分离、轨道倾角和近地点幅角。
4.3.3 星座位置保持要求和控制策略
1)位置保持要求
(1)低轨道星座:半长轴的维护,以抵消气动阻力的影响;地面跟踪控制偏离度(半长轴和/或倾角校正)。
(2)中高轨道星座:半长轴/偏心率维护;若日月摄动影响轨道平面间距变化,进行必要控制。
(3)大椭圆轨道星座:控制半长轴,以保持地面轨迹;偏心率控制,以弥补近地点高度受大气摄动的影响;倾角控制(针对节点和近地点幅角的变化)。
2)星座位置保持策略
(1)绝对轨道控制:保持每颗卫星在一个所要求的控制箱内,这适用于星座每颗卫星是独立的。
(2)相对轨道控制:保证星座整体几何形状,而不是试图维持每颗卫星原先轨道位置。这适用于保持一颗卫星轨迹对另一颗卫星轨迹,从而确保星座服务性能。
(3)星座位置保持策略结果:①通过仿真和进行优化轨道机动,保持在相应的可接受的频带的变量;正确处理绝对和相对控制之间的矛盾;考虑机动实施方面的限制:目标是为使ΔV数值最小,避免发生黑窗口(航天器须重新定向)。②预算任务期间所需要轨道维持的燃料量(考虑卫星质量变化的影响)。
5 小卫星编队飞行
卫星编队飞行概念在理论研究方面出现时间比较早,但是真正具有实际应用价值的是在20世纪90年代后期。在这之前苏联于20世纪60年代曾经利用联盟号飞船(无人)进行过多星编队飞行,但是它们仅是表演飞行试验,不是现在所讨论的卫星编队飞行。真正卫星编队飞行的目的是:提供极大测量基线,从而实现诸如星载干涉仪、全球遥感、同步目标跟踪观测等;多颗卫星同时观测一个目标区域,实现观测数据干涉与合成,从而获得极高观测精度,以解决单颗卫星无法获得高程、地面低速运动目标状态观测等问题。有关卫星编队飞行概念、编队飞行分类、关键技术以及编队飞行优势详细在文献[1,5]中论述。
编队飞行出现至今已有十几年历史,大部分在地球轨道和两个平衡点区域(地-日与地-月),因为平衡点区域重力几乎为零,编队飞行队形实现和保持需要燃料很少,平衡点区域编队飞行用于宇宙探测,这当然也是必要的。但是更有实用价值和迫切性的是地球轨道编队飞行。进入本世纪以来编队飞行已成为空间技术热点研究课题,目前世界上针对编队飞行的国际学术大型会议就有两个:一个为国际航天器编队飞行任务和技术研讨会(Internation Symposium on Formation Flying Missions and Technologies),每隔2~3年举行一次,至今已连续举行5 次;另一个为国际卫星星座和编队飞行(IWSCFF)会议,也是每隔2~3年举行一次,至今已连续举行7次。
虽然航天器编队飞行在积极进行,也取得一些成果。但是就目前研究进展来看,大部分是动力学理论研究和设计方案论证,另一小部分为最简单的两星串联编队飞行空间试验。地球轨道卫星编队飞行对军用民用都具有很大的优势,例如,多颗微波雷达卫星组成精确编队飞行,具有提高地面分辨率、可测高程、监视地面低速运动目标、扩大覆盖幅宽等四大优点。本世纪初美国曾经开展过一个宏伟计划,称为Techsat-21,但因技术难度大,相位同步与要求满足干涉条件非常严格等原因,最后被迫取消。
对地球轨道卫星编队飞行,特别是近地轨道来说:由于低轨道地球扁平J2引起轨道扰动,为了保证微波雷达相位同步,运行一年每颗卫星需要速度增量达100~1000m/s,这样大的燃耗,即使再好的编队飞行目前也无法在低轨道实现。只有多颗卫星分布在不同轨道的编队飞行,才可以获得很高价值的观测成果,在下面本文将提出一个编队飞行全球三维定位系统方案,也就是电子侦察卫星编队飞行方案,它是由多颗小卫星分布在不同轨道的编队飞行。类似这样研究项目是今后编队飞行攻关的重点课题。
6 协同小卫星系统应用(服务)
本文提出几种小卫星系统方案和系统设计,以此作为协同小卫星系统服务应用的示例。
6.1 编队飞行全球三维定位系统
本文的三维定位系统基于反GPS 工作原理,GPS工作原理是地面目标同时能接收到空间3~4颗卫星发出的无线电信号,根据接收各颗卫星信号的时差,经过数据处理,获得地面目标位置和速度。反GPS工作原理是空间编队飞行的3~4颗卫星能同时收到地面目标发出的无线电信号,根据接收信号的时差与频差,获得地面目标位置,这就是电子侦察卫星的基本原理。美国发射过很多电子侦察卫星,其中以“白云”电子侦察卫星为例,定位系统由3颗卫星组成,其中2颗前后分布在同一个轨道,第3颗在前2颗中间,但处在另一轨道,这3颗卫星经过赤道时形成一个等边三角形,可以获得地面雷达三维位置,但是过赤道后第3颗逐渐靠近另外2颗,甚至构成一条直线,定位系统完全失去功能,因此“白云”电子侦察卫星随纬度提高则定位精度很快降低,在高纬度地区这种定位系统无法使用。(一般电子侦察卫星系统定位精度为4~5km。)
本文提出一个可以连续侦察地面和海洋的电子侦察卫星系统。由4颗小卫星按三维编队飞行轨迹布置,编队飞行中心有1颗主星,圆周上按相隔120°均匀分布3颗辅星,如图5所示[6]。

图5 三维编队飞行小卫星组成电子侦察卫星轨道构形Fig.5 Orbital configuration of electronic reconnaissance satellites composed of small satellites 3Dformation flying
图6所示为电子侦察卫星系统工作原理,若采用编队飞行方案,其主星轨道参数如下:长半轴α=7378km(轨道高度1000km),倾角i=63°,4 颗卫星,可以获得三维定位。

图6 电子侦察卫星系统工作原理Fig.6 Electronic reconnaissance satellite system working principle
电子侦察卫星系统分别组成3个卫星组。每组2颗卫星(主星与任意一颗辅星),通过测定辐射源信号到达每组2颗卫星的时间差,得到辐射源至该组2颗卫星的距离差,利用这三组距离差分别建立3个以每组2颗卫星所在位置为焦点的双曲面,然后,根据这三个双曲面和地球表面的交线得出地面雷达三维位置。
三维定位系统最少采用4颗卫星,若卫星数量增加,则三维定位精度提高。当采用精确编队飞行动力学模型和定位方法时,进行数学仿真,可获得下列结果:若采用时差和频差混合定位方法,可获得很高的定位精度。当编队飞行卫星之间位置精度优于1m 时,各星时间同步精度要求为10ns,频差精度为1~2Hz,则全球的地面雷达三维定位精度估计优于1km,星下点半径为1000km 的区域三维定位精度为0.5km;当星下点半径为2000km 的区域时其三维定位精度为0.8km。具体三维定位精度分布如图7所示。
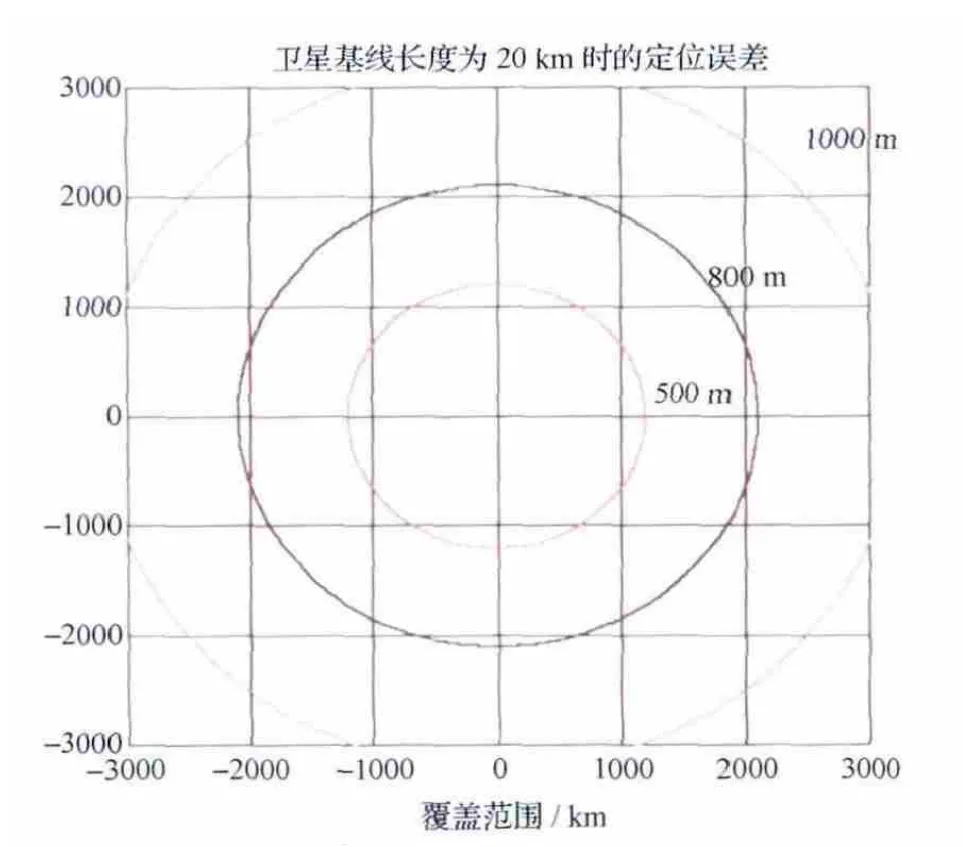
图7 三维定位精度分布Fig.7 Accuracy distribution of 3Dpositioning
若要实现全球电子侦察卫星定位,本文建议把主星轨道改为极轨道。为了满足全球三重覆盖每天最少一次,采用多组编队飞行,每组中心卫星都在同一个轨道平面内且各组均匀分布。由于每组编队飞行都具有三重覆盖,只要中心星构成的编队队形所覆盖范围足够宽广,就可满足每天一次全球覆盖(一天回归轨道)。设Pc为轨道交点周期,由于地球自转,两条相邻星下点轨迹与某一纬度的两个交叉点之间距离为Pc×0.25L(L为在该纬度上转过1°经度的距离,地球每分钟自转的经度为0.25°)。如果在一个轨道周期内均匀布置N组编队飞行卫星,则每组编队卫星飞行的地面覆盖为

当N为5时,B大于等于500km(即采用5组编队飞行卫星,每组3~4颗卫星,总共15~20颗卫星,每组覆盖地面宽度为500km),主卫星星下点宽度±250km。一般来说1000km 轨道高度的电子侦察卫星编队飞行都能满足上述地面覆盖宽度要求。全球电子侦察卫星星座运动轨迹如图8所示。有关电子侦察卫星编队飞行的更加详细文献参见文献[6]。

图8 全球电子侦察卫星飞行轨迹Fig.8 Flight path of global electronic reconnaissance satellite
全球电子侦察卫星飞行系统具有下列创新点:
(1)对全球雷达位置可实现高精度定位,精度几百米(包括高程),比现有定位精度高一个数量级,例如美国“白云”电子侦察卫星,定位精度3~4km;
(2)不受地理纬度限制,可实现全球三维定位;
(3)给出编队飞行动力学精确数学模型,并进行完整数学仿真实验,可得出较可靠的定位精度;
(4)本文为近地轨道多颗小卫星编队飞行的第一个应用示例。
由于这种电子侦察卫星编队飞行只要求高的队形测量精度,而对队形位置保持精度较低,为此消除摄动影响,保持队形,运行一年仅需要速度增量为100~120m/s,这些燃料消耗在实用工程中完全可以接受。
6.2 沿航向编队飞行实现对地综合观测
这里采用沿航向编队飞行,表示两颗卫星在不同轨道飞行,以不同时间(相隔时间为重访时间)覆盖同一个地区。也就是说,它们升交点赤经不相同,与此相应的发射时间也不同,这两者时间差就是重访时间。升交点赤经之差是用来补偿地球自转引起星下点轨迹的变化,而其他轨道根数完全相同。
图9用图解方法表示沿航向编队飞行的概念,图9表示以不同时间的2颗卫星通过升交点赤经相差为ΔΩ=tw,其中t为通过升交点时间差(也称重访时间),w为地球自转角速度。
沿航向编队飞行实现对地综合观测。轨道设计方案采用一天回归轨道,对近地轨道来说,一天回归只有两个轨道高度:561km 圆轨道与888km 圆轨道。这里采用561km 低圆轨道,因为分辨率较高。有效载荷可采用全色或多光谱相机,土壤水分、植皮、地表温度、海洋水色、海洋各种参数以及自然灾害等各种监测仪器[7]。每颗小卫星只装1~2种有效载荷,以适应小卫星质量与功耗许可范围。编队飞行构建一条对地综合观测覆盖地带。一般覆盖地带宽度近百千米,若采用在滚动轴左右侧摆方式,覆盖地带宽度可达100~200km。

图9 沿航向编队飞行概念Fig.9 Concept of formation flying along the course
覆盖地带观测方案:根据覆盖我国区域须要选择最合适的倾角。例如倾角60°~65°,升交点为东经105°~110°。系统可由若干具有不同有效载荷的小卫星组成。卫星数量、种类、星间间隔等完全按飞行任务和总体设计要求来确定。运载火箭发射方式有两种:①多次发射方式,每次升交点赤经相差根据公式ΔΩ=tw计算,从而补偿地球自转效应;②1次发射6~7种对地观测监测器,要求第3级火箭入轨后,每隔5~6min释放一颗小卫星,第3级火箭通过升交点为当地时间上午6~7时左右,释放第7颗小卫星的近地点幅角ω为0°(对我国南海进行观测),这样连续释放全部监测器大约需要40min,由于采用一天回归轨道,每天至少有几次都会在白天观测。图10表示由7种任意不同的观测监测器实现对地综合观测,而且每种监测器对地重访时间为1天。图10中1、2、3、…7代表7种对地综合监测器。这种设计方案可以满足许多领域应用的要求。当采用第一种多次发射方式,每颗小卫星间隔时间可以根据需要来选择,然后计算升交点赤经之差;若按第二种1次发射方式,第3级火箭向后释放小卫星,而且要求有一定分离速度,这样发射完毕,7 颗小卫星像一串糖葫芦,因为分离速度不同且又有释放间隔时间,所以不会发生碰撞。

图10 表示由7种不同观测监测器实现对地综合观测(示意图)Fig.10 Integrated earth observation implemented by seven different observation monitoring instruments
6.3 地球同步轨道卫星编队飞行
本方案在地球同步轨道分布4颗卫星组成编队飞行。具体作法如下:①让卫星轨道周期相等于地球自转周期(23h56min4.1s);②倾角非零,此时星下点轨迹为8 字形,倾角大小决定8 字形大小;③椭圆度非零,适当选择倾角和椭圆度,这4颗卫星就构成如图11所示的编队飞行,而且这4颗卫星在一轨道周期内绕基准星(以红色表示)两圏。
当4颗卫星组成编队飞行作为区域三维导航卫星系统时,就是导航卫星星座;当对地观测,4 颗卫星同时对准一个观测目标,则成为对地观测编队飞行。这说明本方案具有星座和编队飞行两种功能,完全取决于采用什么样的卫星和数据处理。这一特点至今世上还没有找到第二个示例。
本文设计为区域导航卫星系统,其特点是用最小数量卫星,实现高精度三维区域导航,对中国和四周区域可以连续24h高精度导航,一般导航星座至少需要十几颗卫星。采用4颗卫星编队飞行,即可实现覆盖在本区域内的任何用户可以连续不断同时接收到4颗导航卫星的信号,由于编队飞行的4颗卫星可以长期保持一个基本不变的队形,从而保证导航精度所必要的定位精度在10m 左右。这是至今为止在相同精度和相同覆盖区条件下,采用卫星数量最少的,也是投资经费最低的导航系统方案,详细参阅文献[8]。
图11表示4颗小卫星在地球同步轨道编队飞行,当中一颗(红色)为备份卫星。编队队形由于轨道摄动变化如图12所示,图中表示编队飞行半径为10 000km 运行一年的队形变化。
经过采用精确编队队形动力学模型,获得在确保导航定位条件下,每年要修正轨道速度增量ΔV为20~30m/s。
地球同步轨道对地观测最大优点是实时性,重访时间为零,但是距离很远,单颗卫星光学相机分辨率非常低,无实用价值。若要提高相机分辨率,则相机镜头重量剧增,以致实际工程无法实现。为此单颗卫星对地观测无法解决实时性,只能采用联合多颗卫星编队飞行协同工作。

图11 地球同步轨道分布4颗卫星的编队飞行Fig.11 Four satellite formation flying in geostationary orbit

图12 卫星编队飞行轨道位置一年的变化历程Fig.12 Orbital position change process of satellites formation flying in a year
在地球同步轨道4颗卫星可以连续对准同一个目标观测,然后对观测结果进行干涉与合成数据处理,从而获得较高的空间分辨率和时间分辨率(重访时间为零)。但是目前干涉合成数据处理,覆盖面积不够理想,只能完成小区域点对点变换的数据处理,获得很小覆盖面积,实际应用须要进行面对面变换,才能获得所需要大的覆盖面积。但是这一技术目前还存在较大困难,只待今后技术进展,逐步解决。
6.4 对地观测手机小卫星星座
采用手机作为有效载荷,立方体纳型卫星为平台,类似英国萨瑞大学空间研究中心(SSC)最近发射的STRaNT-1 纳型手机卫星[9]。这里着重讨论手机小卫星对地观测星座,具体方案如下所述。
在智能手机摄像头前加装一个具有2°视场的光学小镜头,目前手机具有1300万像素,拍照为来复式。在500km 轨道高度将产生18km×18km=324km2覆盖面积的一幅图像,分辨率为5 m。分辨率=覆盖宽度/像素=18 000 m/3500 =5 m(1300万像素开平方结果约为3500)。
这颗纳星还有两个固定式太阳电池阵,每颗纳星质量为5~6kg,投资成本不到15万美元。
以上述手机卫星为基础,可以组成多种对地观测和通信卫星星座,这里仅讨论其中一种:把上述4颗手机卫星横向连接在一起(垂直于轨道平面),相当推扫宽度为4×18=72km。手机除了来复式拍照,还可以连拍,每幅为72km×18km≈1300km2,要求选择拍照速度和卫星对地运动相一致。这个应用示例可以与2008年德国发射的“快眼”(Rapid Eye)小卫星星座比较,该星座覆盖宽度78km,光学分辨率为5m,卫星重量为150kg。由5颗小卫星组成星座,覆盖全球时间为1天,星座经济投资约为7000万美元。4颗手机卫星为一组,相当一颗“快眼”小卫星,若加一些余量,大约6 组手机卫星就可以1天时间覆盖全球,也就是由24颗手机卫星组成星座,相当5颗小卫星组成“快眼”星座,其经济投资仅为360万美元,约是“快眼”小卫星星座投资的1/20。24颗手机卫星星座质量约为“快眼”小卫星星座1/6.5。当然,这种比较仅就从光学对地观测角度来分析,是不够全面的,因为“快眼”小卫星星座具备其他功能,例如多光谱成像等,但仍然可以说明手机卫星星座的优势。另外手机卫星还具有通信能力,若加装一些设备如通信转发器、改善收发机与天线的性能(当然也须增加卫星重量和功耗),则可以组成各种实时数据存储转发通信手机卫星星座。
总之,若能巧妙成功采用手机卫星组成各种应用星座[10],则投资成本将会有数量级的降低,原因很简单,手机卫星的有效载荷和平台都已是现有的成熟商品,在这之前人们已经花费了几十至上百亿美元作为研制开发费用。
7 结束语
本文提出5S概念的主要目的:希望正在蓬勃发展的小卫星、微小卫星、微型卫星、纳型卫星以及立方体星等,能积极开创研制协同小卫星系统,以扩大其在各个领域的新应用。5S的发展前景将是十分美好的,这可由5S特点:投资成本小、研制周期短和实用效果好等优势体现出来。
(References)
[1]林来兴,张小琳.星群、星座与编队飞行的概念辨析[J]航天器工程,2012,21(5):97-102
Lin Laixing,Zhang Xiaolin.Discussion on conception of cluster,constellation and formation flying[J].Spacecraft Engineering,2012,21(5):97-102(in Chinese)
[2]Cornara S.Definition and design of satellite constellations and formation flying systems[R].Madrid:DEIMOS Space S.L.U,2012
[3]Andrews J.Constellation of distributed NanoSats for real time Earth observation,IAA-B8-1002[C]//8th IAA Symposium on Small Satellites for Earth Observation.Berlin:IAA,2011
[4]Escorial D,Tourne I F,Reina F J.FUEGO:a dedicated constellation of small satellites to detect and monitor forest fires,IAA-B3-0601[C]//3th Symposium.Berlin:IAA,2006
[5]Leitner J A.Spacecraft formation flying—an overview of missions and technology challenges,AAS 07-031[R].San Diego:AAS,2007
[6]林来兴,车汝才.卫星编队飞行精确动力学模型与三维定位系统[J].宇航学报,2008,29(3):831-837
Lin Laixing,Che Rucai.Accurate dynamics models of satellite formation flying and 3-Dimension positioning system[J].Journal of Astronautics,2008,29(3):831-837(in Chinese)
[7]Selva D,Krejci D.A survey and assessment of the capabilities of Cubesats for earth observation[J].Acta Astronautica,2012,74:50-68
[8]林来兴,张洪华,车汝才.编队飞行区域性导航卫星和位置保持[J].宇航学报,2004,25(1):82-88
Lin Laixing,Zhang Honghua,Che Rucai.The formation flying satellites for the regional navigation and their station-keeping[J].Journal of Astronautics,2004,25(1):82-88(in Chinese)
[9]Kenyon S,Bridges C.STRAND-1:use of a$500SmartPhone as the central avionics of a NanoSatellite,IAC-11-B4.6B.8[C]//62nd Internation Astronautical Congress.Paris:IAF,2011
[10]Marshal M.PhoneSat:a smartphone-based spacecraft bus,IAC-11-b4.6B9[C]//62nd Internation Astronantical Congress.Paris:IAF,2011
