多视场法在基于双端激光雷达的大气探测实验中的应用
2013-12-24尹红伟周勇壮刘阳洋蓝天鹏
尹红伟,周勇壮,刘阳洋,陈 恬,蓝天鹏
(国防科技大学,湖南 长沙 410073)
激光雷达是大气光学探测的一种重要手段,按其结构的不同可分为单端和双端两种。传统的单端激光雷达只能测量后向散射信号,而双端激光雷达可以测量各向散射信号。通过双端激光雷达已进行了多次大气探测实验,获得了丰富的大分布数据,如气溶胶的粒径分布和折射率[1-2]、大气的 Mueller 矩阵[3-4]、水云粒子的粒径[5-6]等。文献[1-6]中的接收端都是光电倍增管,工作中需要角度扫描;通过使用 CCD[7-8]作接收端,可一次获得大气剖面的特征而无须角度扫描[9-12]。实验中散射角度的测量范围为90~180°。
双端激光雷达的接收端接收到的散射信号包括单次和多次散射信号,其中单次散射只发生在所探测大气区域,而多次散射不局限于所探测大气区域,因此,只有单次散射信号可用于大气探测。如果不加区别的把所测散射信号都近似为单次的,在特定情况下可能对大气探测结果带来较大的误差。因此,单次和多次散射信号的区分对于双端激光雷达在大气探测实验中的精度具有重要意义。
1 理论背景
双端激光雷达的结构如图1所示,由发射端和接收端构成。相关参数设置如下:θT是发射端的发散半角,βT是发射端的仰角,θR是接收端的视场半角,βR是接收端的仰角,r是发射端和接收端的距离,r1是探测区域和发射端的距离,r2是探测区域和接收端的距离,θs是测量散射角,ΩT=4πsin2(θT/2)是发射端的立体角,ΩR=4πsin2(θR/2)是接收端的立体角,PT是发射端的脉冲功率,AR是接收器的接收面积,是探测高度。大气参数包括消光系数ke、散射系数ks,散射相函数P(θs)。
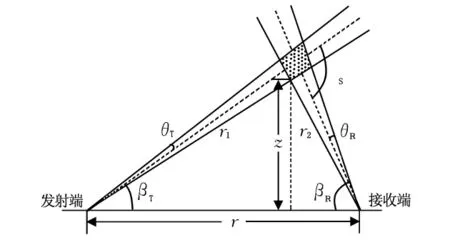
图1 双端激光雷达示意图
接收端接收到的总散射信号功率表示为:

其中:PR,single表示单次散射信号功率,PR,multi表示多次散射信号功率。
单次散射功率与探测区域有关,表示如下[1-3,12]:

探测区域的体积可近似表示如下:
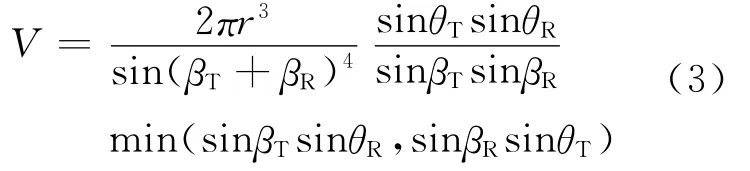
双端激光雷达的散射角分辨率为Δθ=2(θT+θR),探测光学深度为τ=ke(r1+r2)。
与单次散射不同,多次散射不局限于探测区域,其过程较为复杂。多次散射信号功率的计算基于蒙特卡罗模型进行[13]。
2 多视场法的定量模拟
多视场法用于双端激光雷达的参数设置如下:ke=2×10-3/m,ks=1×10-3/m,βT=βR=45°,θT=0.5°,P(θs)=1,pT=1 W,AR=1 c m2,r=1~3 000 m;θR=(1°,2°,4°,8°)。假设双端激光雷达的接收端视场分别为θR,1和θR,2,所测散射信号功率分别为PR,1和PR,2,其中的单次和多次散射信号功率分别为P1R,single,P1R,multi,P2R,single,P2R,multi,令n=θR,2/θR,1,则P2R,single/P1R,single,P2R,multi/P1R,multi与n应具有一定的关系。
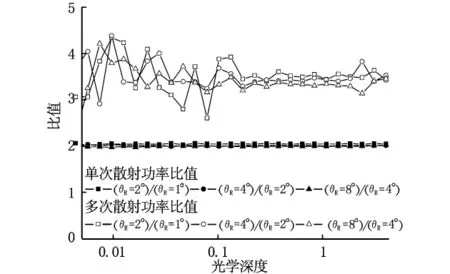
图2 多视场下散射信号功率的比值
单次散射信号功率的计算基于方程(2),多次散射信号功率的计算基于蒙特卡罗模型。计算所得的多视场下散射信号功率的比值如图2所示。由图中可以看出单次散射功率与接收端的视场角成正比,而多次散射功率近似与接收端的立体角成正比。因此,通过多视场设置,可以定量区分双端激光雷达接收到的单次和多次散射信号。图2中的涨落是蒙特卡罗随机模拟的典型现象,可以通过增多模拟光子数来抑制。多视场与单次和多次散射信号的关系可用以下方程表示:
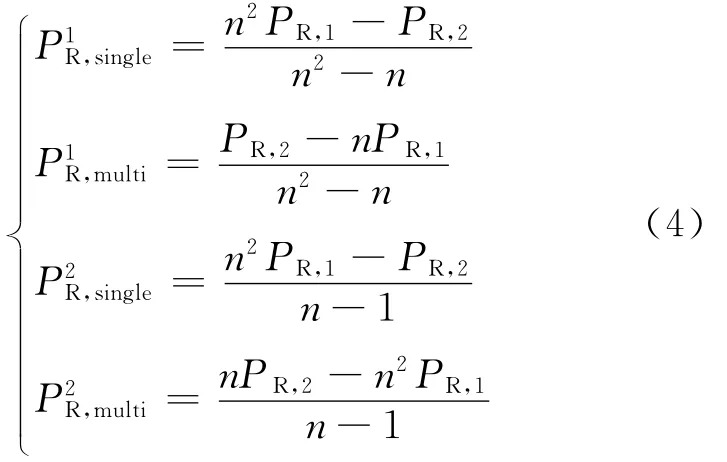
方程(4)可用于单次散射信号功率的精确评估,并提高双端激光雷达在大气探测实验中的精度。所用模拟条件与文献[1-9]所报道实验一致,其它条件下的方程也可通过方程(2)和蒙特卡罗模型计算,然后分析数据得出。
3 结 论
提出通过多视场的方法来定量评估双端激光雷达接收到的单次和多次散射信号,基于理论模型计算的结果证明多视场法是可行的,并总结了从多次测量结果中计算单次和多次散射信号的经验公式。多视场法可望使双端激光雷达在大气探测实验中达到更高的精度。
[1]G.Pandithurai,P.C.S.Devara,P.E.Raj,et al.Aerosol Size Distribution and Refractive Index fr om Bistatic Lidar Angular Scattering Measurements in the Surface Layer[J].Remote Sensing Environment,1996,56:87-96.
[2]P.C.S.Devara,P.E.Raj,and G.Pandithurai.Aerosol-profile Measurements in the Lower Troposphere with Four-wavelength Bistatic Argon-ion Lidar[J].Applied Optics,1995,34:4416-4425.
[3]J.A.Reagan,D.M.Byr ne,B.M.Her man.Bistatic LIDAR:A Tool f or Characterizing At mospheric Particulates.I.The Remote Sensing Problem.International Geoscience and Remote Sensing Sy mposiu m(IGARSS'81)Digest,8-10 June 1981,IEEE Trans.Geosci.Remote Sens.(USA)1982:229-235.
[4]J.A.Reagan,D.M.Byr ne,B.M.Her man.Bistatic LIDAR:A Tool f or Characterizing At mospheric Particulates.II.The Inverse Pr oblem.Inter nationalGeoscience and Remote Sensing Sy mposiu m(IGARSS'81)Digest,8-10 June 1981,IEEE Trans.Geosci.Remote Sens.(USA)1982:236-243.
[5]N.Sugi moto.Two-Color Dual-polarization Pulsed Bistatic Lidar for Measuring Water Cloud Droplet Size[J].Optical Review,2000,7:235-240.
[6]K.F.G.Olofson,G.Witt,J.B.C.et al.Bistatic Lidar Measurements of Clouds in the Nordic Arctic region[J].Applied Optics 2008,47:4777-4786.
[7]朱华,冯晓炜.线阵CCD在光学实验上的应用[J].大学物理实验,2011(4):17-18.
[8]唐军杰,王爱军.CCD像感器在光学演示实验中的应用[J].大学物理实验,2012(2):51-53.
[9]K.Meki,K.Yamaguchi,X.Li,et al.Range-resolved Bistatic Imaging Lidar f or The Measurement of the Lower At mosphere[J].Optics Letters,1996,21:1318-1320.
[10]J.E.Bar nes,N.C.P.Shar ma,T.B.Kaplan.At mospheric Aerosol Pr ofiling with a Bistatic Imaging Lidar System.Applied Optics,2007,46:2922-2929.
[11]N.C.P.Shar ma,J.E.Bar nes,T.Kaplan,et al.An Imaging Bistatic Lidar System for Boundary Layer Monitoring[J].IEEE Inter national Geoscience and Remote Sensing Sy mposiu m, 2006 (1-8):3953-3955.
[12]J.E.Bar nes,S.Bronner,R.Beck,et al.Boundar y Layer Scattering Measurements with A Chargecoupled Device Ca mera lidar[J].Applied Optics,2003,42:2647-2652.
[13]H.W.Yin,S.L.Chang,H.H.Jia,et al.Non-lineof-sight Multiscatter Propagation Model[J].Journal of the Optical Society of America a-Optics I mage Science and Vision,2009,26:2466-2469.