一种新型光梳状滤波器自动装配系统控制分析
2013-12-23王志明薛静芳
王志明,薛静芳,陈 杰
(上海交通大学 机械工程学院,上海 200240)
0 引言
PID控制方式是工业生产中最常用的一种控制方式[1]。传统的PID 控制器为找到PID 控制系统的最佳参数KP、Ki、Kd,通常需要大量的计算量和实验数据。数字PID 控制器则由软件管理,具有不改变硬件、只修改软件就可以实现参数设定的天生优点。
光梳状滤波器是一种可倍增现有光网络传输容量的新型波分复用滤波器,已成为光纤通信系统中的关键器件,应用前景广泛。但是,目前光梳状滤波器主要依靠手动生产,对操作人员的要求非常高,因此,实现光梳状滤波器件生产的自动化无疑具有非常重要的意义。本文将运用PID 控制方式,利用Ziegler-Nichols法进行参数整定,开发出光梳状滤波器自动化装配平台。
1 光梳状滤波器原理
图1为1∶2光梳状滤波器的工作原理[2]。
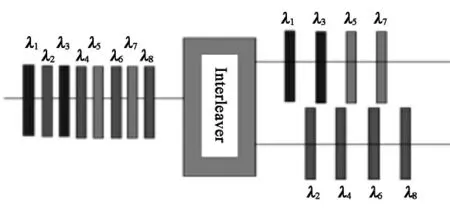
图1 1∶2光梳状滤波器的工作原理
Finisar公司(以下简称F 公司)生产的商用光梳状滤波器单元(Cell),其原理是用一对可调节位置的补偿器对中心波长进行光路耦合,直到找到需要的精确参数值点。补偿器有一定锲角,通过前后移动补偿器来 调节光 程差ΔOPD(optical path different,单 位nm)[3],即可获得确定的中心波长λc(nm)和斜率值Slope(比率值,常用dB 来描述)。运用光学知识和ITU(International Telecommunication Unit,国际电信联盟)标准的定义,可以简化得到λc与ΔOPD之间的关系:

其中:λA为中心波长变化范围值,nm,为与设定有关的常量;α为无量纲常数;A 为幅值,nm,为与材料设计有关的常量;D0为与初始位置有关的常量,nm;n为整数。n满足如下关系:

由式(1)和式(2)可知,λc与ΔOPD之间是一个锯齿波形函数。斜率值与中心波长之间存在如下关系:

其中:λITU为ITU 规定值。Slope值与ΔOPD之间是另一种倾斜变化的锯齿波形函数。实验测得与推导一样,λc值与ΔOPD之间、Slope值与ΔOPD之间有同时呈线性变化的区域,并都有满足要求的交叉点(要求λc不超出设定值的±5pm,Slope不超过±0.5dB)。单元装配系统即是要调节找到该点并用紫外光(Ultraviolet,UV)固化胶固化装配。F公司现有的手动调节系统平均调节时间超过30min,并需要非常有经验的操作员。设计控制系统的目的就是要通过自动调节找到该点的位置,并要求调节时间在5min内。为此我们需要考虑并解决以下两个关键问题:①改进现有机构、夹具,解决目前中心波长变化容易超标的问题;②组建并寻找最优组合的驱动→检测→控制方式,达到5min调节的目的。
2 自动控制系统设计与控制理论分析
2.1 构建自动装配流程图及系统参数设定与分析
本文通过静力学和动力学有限元分析,得到自动装配系统的3D 主体结构和完整结构设计,定位和控制精度保证了中心波长变化在±5pm。图2 为自动化系统的3D 主体结构。
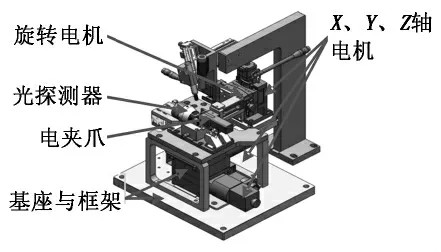
图2 自动化系统的3D 主体结构
自动调节过程的控制电路结构框图见图3。
根据分析需要,我们选择具有PID 控制模块的NI PCI7344控制器和骏河精机的XY 交错步进电机KS201-30LHD(最小分辨率为0.5μm,最大速度为0.2mm/s,单轴位移重复精度为±0.3μm);光功率检测仪检测参数需要的时间约为3s,因此每一步循环需要约3s的延迟时间。
2.2 PID 控制系统分析以及参数整定
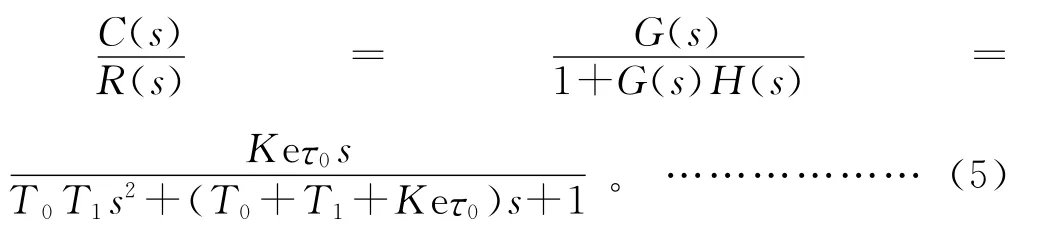
按照PID 参数整定法的设计思路,先按照系统的组成写成不包含PID 控制的相关传递图。控制器为带放大的惯性环节,步进马达亦作为放大惯性传递函数,图3的控制电路写成如图4所示的传递函数。其中,τ0为测试延迟时间τ0=3s,e为自然常数,K0、T0为控制器的放大系数和时间常数,K1、T1为步进马达的放大系数和时间常数。前向通道传递函数为:


图3 自动调节过程的控制电路结构框图

图4 传递函数
根据经验选择电机的性能,可以大致估计各参数近似值为:τ0=3s,K0=1.67,T0=4.05s,K1=8.22,T1=1s。利用上述参数用MATLAB仿真模拟软件Simulink进行模拟[4],得到单位脉冲响应传递函数及其开环单位脉冲响应曲线,如图5所示。

图5 单位脉冲响应传递函数及开环单位脉冲响应曲线
通过分析可以发现,系统达到稳态值偏差较大,不能满足中心波长的调节要求,必须通过PID 控制器对控制进行整形。运用PID 控制方式的传递函数为:

其中:KP为比例系数;Ti为积分时间常数,s;Td为微分时间常数,s。这3者都是可调的参数。加入PID 控制器后,其传递框图如图6所示。
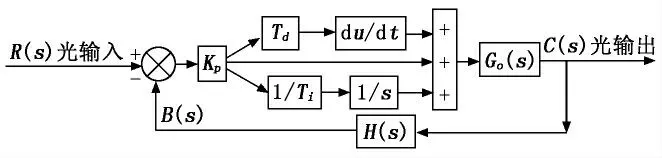
图6 PID 传递框图
由图5可以看出,原传递函数的开环响应曲线为S形曲线,带有时滞函数,为3阶以上传递函数,所以图6可以利用Ziegler-Nichols整定方法求解,按照图5(b)中S形响应曲线的参数求法,大致求得系统延迟时间τL、放大系数K 和时间常数T 分别为:τL=2.2s,T=5s,K=27.272 7。再利用Ziegler-Nichols法整定控制器参数,最后得到的PID 系数为:KP=0.1,Ti=4.84s,Td=1.1s。
运用MATLAB/Simulink模拟仿真,得到其传递函数及单位阶跃响应曲线,见图7。
通过响应曲线,可以大致确定参数如下:
(1)峰值时间:tP=10s;
(2)超调量:σP=(1.25-1)/1×100%=25% ;
(3)调节时间:tS≈16s<5min,在目标范围以内。
利用软件进行数字PID 编程,可以实现调节控制系统的优化。

图7 PID 控制Simulink仿真建模 及单位阶跃响应曲线
3 结论
本文介绍了光梳状滤波器自动化装配平台的开发。基于数值PID 控制理论,并运用MATLAB仿真,结合Ziegler-Nichols整定方法寻找优化参数,构成适合本产品项目的数字PID 控制系统。系统调节时间通常在20s以内完成,整个过程控制在3min~5min以内,达到了设定的目标时间,比手动平均调节时间30min快了6倍。实测50 个产品均达到了要求,所得到的实际参数值与理论参数值基本吻合,该方法大大提高了生产效率。
[1] 王显正,莫锦秋,王旭永.控制理论基础[M].第2版.北京:科学出版社,2010.
[2] 邵永红.光学梳状滤波器技术研究[D].上海:中国科学院上海冶金研究所,2000:5-25.
[3] 杜腾达,张大鹏.光学交错器、滤波器单元和色散小的部件设计:中国,200510078136.5[P].2005-12-14.
[4] 张若青,罗学科,王民.控制工程基础及MATLAB 实践[M].北京:高等教育出版社,2008.
