一类“浮力-压块”驱动飞艇建模及控制
2013-12-23邬依林刘林东
邬依林,刘林东,刘 屿
1)广东第二师范学院计算机科学系,广州510310;2)华南理工大学自动化科学与工程学院,广州510640
相比传统HTA (heavier-than-air)航空器,飞艇属于LTA (lighter-than-air)类航空器,它由轻于空气的气体提供升力并停留在高空,其独具的特性给飞艇带来诸如悬空时间长、有效负荷比高和燃油消耗低等巨大优势. 因此,自治飞艇在信息、空间开发、军事、运输和监控等领域具有广泛尚未完全开发的应用前景,自20 世纪90 年代已再次成为世界各国特别是发达国家争夺的空间资源,并相继投入巨资进行研发[1-3].
本文研究一类全新飞艇,即“浮力-压块”驱动飞艇的建模及控制器设计. 该类飞艇与传统飞艇在结构上存在以下区别:一是其将不再配有推进器;二是飞艇装备有压块,且压块可在机体内运动. 其显著特点是飞行所需驱动力不再由推进器提供,而由压块运动和气囊充放气耦合作用提供,同时压块也可控制飞艇姿态.
文献[1-2]直接利用势流理论和Kirchhoff 方程经典结论研究飞艇动力学模型;文献[4-6]给出飞艇建模及控制研究. 但这两类模型都未考虑升降气囊和压块的存在. 文献[7]没有真正将气囊从机体中分离出来,难以实现压块和气囊的独立运动.
本研究采用Kirchhoff 方程和Newton-Euler 理论建立包括独立气囊和可运动压块的6 自由度非线性模型. 通过设计反馈线性化控制器和线性二次型调节器 (linear quadratic regulator,LQR)最优控制器,分析“浮力-压块”驱动飞艇的平衡航迹镇定和期望输出跟踪. 在飞艇模型中,给出气囊和压块的独立动力学方程,实现“浮力-压块”驱动飞艇研究. 建立该类模型对飞艇发展具有重要意义.
1 飞艇受力分析及动力学建模
本研究认为基于假设合理:①飞艇体积中心与浮力中心重合;②视飞艇为标准对称的椭圆形刚体. 这是目前国内研究普遍采用的简化方法[1,2,4,6].
1.1 运动机理
“浮力-压块”驱动飞艇运动机理为:当气囊放气后,飞艇质量减轻,净升力(空气升力与飞艇质量之差)变为正(向上),且压块向机尾移动改变其姿态,从而改变气动力方向,最终飞艇将以航迹角ξ 向右斜上方飞行;与此相反,当气囊充气后,净升力变为负(向下),且压块向机头运动改变气动力方向,最终飞艇以航迹角ξ 向右斜下方飞行. 如此反复的气囊充放气和压块前后运动,将使飞艇以“锯齿”形轨迹前行,如图1.

图1 飞艇“锯齿”飞行路径Fig.1 Sawtooth flight of airship
1.2 坐标系定义及运动学
如图2,机体系{Oe1e2e3}建立在飞艇浮力中心,其中,e1、e2和e3分别为机体系3 个轴向的单位向量;惯性系{oijk}建立在地球表面某点,其中,i、j 和k 分别为惯性系3 个轴向的单位向量.
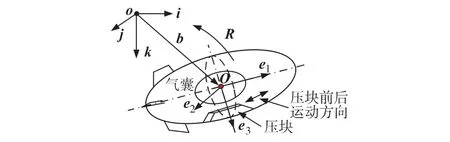
图2 飞艇结构和坐标系Fig.2 Structure and coordinate of airship
设b = [b1,b2,b3]T∈ℛ3为飞艇在惯性系中的位置矢量,R ∈SO(3)为飞艇相对惯性系的姿态,ℛ3为欧氏空间,SO(3)为Lie 群空间,其中R 可由飞艇RPY 角(即滚转角φ、俯仰角θ 和偏航角ψ)表示. 则飞艇运动学方程为[7-8]


1.3 总外力FΣ 和总外力矩MΣ
在机体系中,飞艇所受总外力FΣ和总外力矩MΣ可表示为[1-2]

其中,Rab为速度坐标系与机体系之间的转换矩阵,其他各元素的意义和计算如下.
1.3.1 附加力FI和附加力矩MI
与传统飞行器相比,飞艇具有很大体积质量比,当飞艇在空气中运动时,周围空气对于飞艇来说为重流体,其附加量Md不能忽略. 文献[7-8]给出Md计算方法为

其中,广义力的物理量Mf= diag[Mf1,Mf2,Mf3]和Jf= diag[Jf1,Jf2,Jf3]分别为附加质量和附加惯性.流体扰动运动的动量E 和动量矩K 可表示为

因此,在机体系中,附加力FI和附加力矩MI为

1.3.2 气动力FA和气动力矩MA
空气中飞行器表面分布气动压力. 飞艇表面气动压力可归并为作用于飞艇质心的一个合力矢量FA和一个合力矩矢量MA

其中,阻力Xa、侧力Ya和升力Za分别为FA在速度坐标系上的分量;滚转力矩La、俯仰力矩Ma和偏航力矩Na分别为MA在机体坐标系上的分量;Q=0.5ρV2为动压,ρ 为空气密度;Λ 为飞艇体积. 受文献[5]启发,式(6)中系数CX、CY、CZ、Cl、Cm和Cn的计算模型可构造为
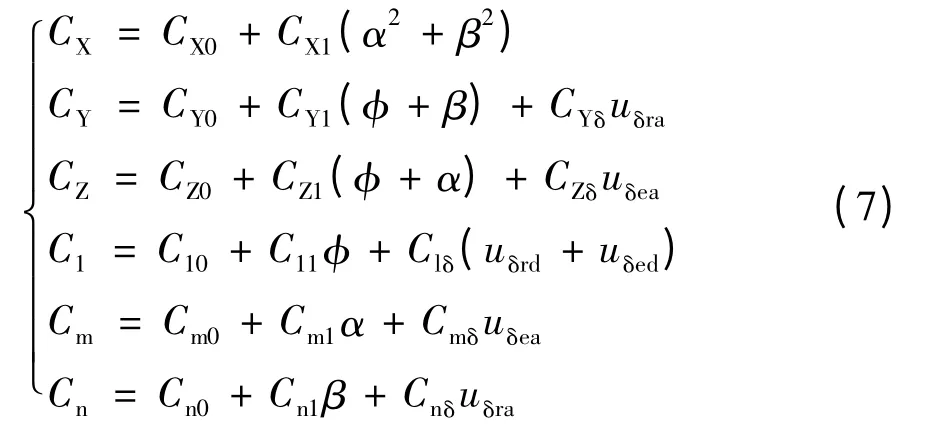
其中,CX0、CY0、CZ0、Cl0、Cm0和Cn0为平衡条件下的气动力系数;其他C(·)均为气动导数;α 和β 分别为飞艇的迎角和侧滑角;uδ= [uδea,uδed,uδra,uδrd]=[δel+δer,δel-δer,δrb+δrt,δrb-δrt]为升降舵和方向舵控制量,δrt和δrb为上下方向舵偏角,δel和δer为左右升降舵偏角.
1.3.3 净升力Fn和净升力矩Mn
若飞艇所受浮力由其体积排开的空气产生,则飞艇的净升力Fn为

其中,mw= ρΛ;mh= mj+mq+my,mj、mq和my分别为机体、气囊和压块的质量;g 为重力加速度.
质量mj均匀分布,质量mq和升力mwgk 都位于机体系圆心,因此mj、mq和mwgk 均不产生力矩. 若设ry= [ry1,ry2,ry3]T为压块在机体系中的位置向量,则飞艇所受的净升力矩Mn为

1.4 压块动力学
在机体系,设压块动量Гy= [Гy1,Гy2,Гy3]T,根据机体系与惯性系的关系可得

其中,vy为压块绝对速度.
1.5 飞艇总动量Г 和总动量矩Π
设飞艇中不可运动质量ms= mj+ mq,压块my则视为可运动质量

其中,Jj为机体质量mj在机体系的惯性矩阵.
1.6 控制输入
若以作用在飞艇上的力为控制输入,包括压块运动控制输入uy= [uy1,uy2,uy3]T、气囊充放气控制输入ub以及方向舵和升降舵的控制输入uδ,则定义控制输入为

1.7 模型
对式(11)求导,可得与式(2)形式不同的FΣ和MΣ的另一种表述方式

通过综合式(2)和式(13)可得
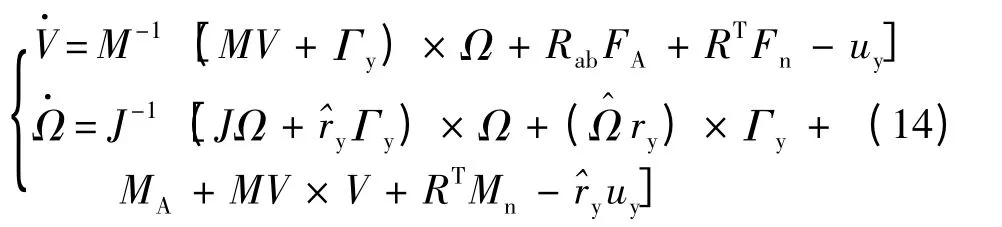
其中,M = Mf+msI3= diag[M1,M2,M3];J = Jf+Jj= diag[J1,J2,J3];I3为3 ×3 阶单位矩阵.
结合式(1)、(10)、(12)和(14),即可得“浮力-压块”驱动飞艇6 自由度非线性模型

2 纵向平面运动方程
2.1 纵向模型
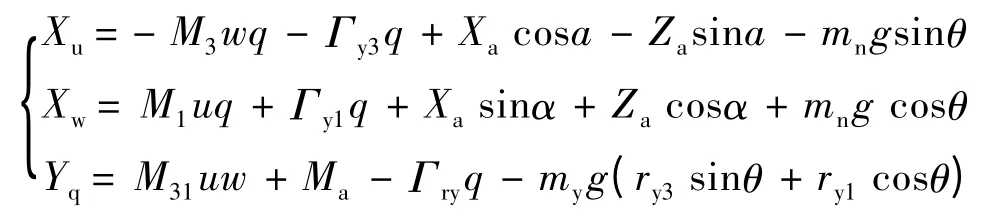
当飞艇运动被限制在纵向平面时,则有ψ = φ= v = b2= p = r = ry2= Γy2= uy2= 0,由式(15)可得飞艇纵向平面运动模型[8-9]

若令Γry= ry1Γy1+ ry3Γy3,M31= M3- M1,则
2.2 非线性反馈模型
为得到有效的飞艇动力学模型,对式(16)实施状态量和控制量的非线性反馈变换,通过变换将内部压块控制量由作用力转换为其运动加速度,将气囊控制量由充放气率转换为充放气加速度. 由式(16)中的第3 和4 行得


式(18)中,只要my、M1或M3不全为零,式中CD即可逆. 将反馈控制律式(18)带入式(16)得

若令Ub为气囊充放气的加速度,即

由式(19)和式(20)构成一个完整的、经过非线性反馈变换后的飞艇纵向平面模型.
2.3 线性化模型
类似文献[2,9]研究方法,采用小扰动理论将飞艇纵向模型式(16)线性化,其线性化结果可直接引用文献[8]中式(26),得

其中,xl= [u,w,q,θ]T;ul= [uy1,uy3,mn,uδea]T;ε = 0.5ρV0Λ2/3;ħ = 0.5ρV0Λ;al1= ε(CX0+CZ1);al2= (M1+ my)V0M;al3= (M3- M1)V0+ħCm1;al4= mygry30.
3 平衡航迹
通过给定期望航迹角ξe和期望飞行速度Ve设计飞艇的平衡航迹[3,9]. 本文设凡带有下标“e”的变量均为飞艇平衡航行时的变量值,通过令式(16)等号左边为零,解得这些变量值,具体求解详见文献[3]. 图3 为给定平衡航迹示意图. 航迹具有4 个平衡航迹段和3 个转换航迹段,每个平衡航迹段的航迹角ξe为20°、-20°、30°和-30°,其平衡飞行参数见表1.
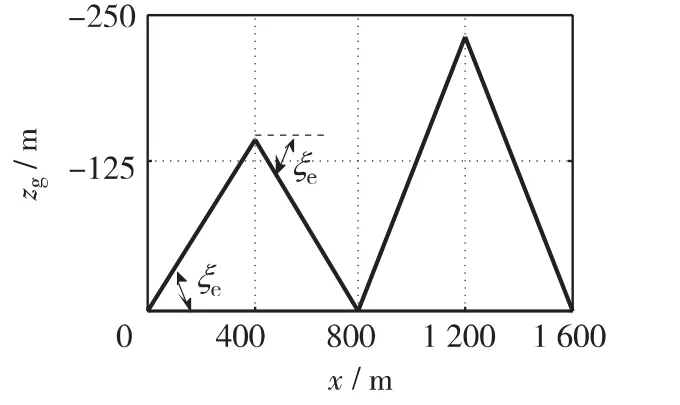
图3 平衡航迹示意图Fig.3 Equilibrium flight path

表1 平衡飞行参数[3]Table1 Parameters of equilibrium flight[3]
4 控制器设计
4.1 反馈线性化控制器
利用最小相位系统特性,选择适当的系统输出yo,设计控制律对非线性系统式(19)和式(20)实施多输入多输出(multi-input multi-output,MIMO)反馈线性化变换,从而实现对运动轨迹的跟踪.
若定义
则MIMO 线性化飞艇控制系统可设计为

其中,κ 为非线性向量场,其元素由式(19)和(20)构成,且

对系统式(23),当给定ry1e、ry3e和mqe时,若系统处于平衡状态,则意味xl= xle、η = 0 和Ul=0,因此,控制系统的零动态可表示为

定理 对于任意给定的xle,反馈线性化动态控制系统式(23)都是一个局部指数稳定的零动态式(24). 若取Ul=ϖη,则A +Bϖ 为霍尔维茨(Hurwitz)矩阵,(xl,η)= (xle,0)为闭环动态的一个局部指数稳定平衡点.
【证】在(xle,0)点,反馈线性化控制系统式(23)的雅克比矩阵为

式(25)为上三角形矩阵,A + Bϖ 为Hurwitz 矩阵,(∂κ/∂xl)e和A + Bϖ 的特征值为飞艇闭环控制系统的特征值,按照上述定理假设,(xle,0)就是闭环动态的一个局部指数稳定平衡点. 证毕.
若选择比例微分(proportional-derivative,PD)控制器作为飞艇系统的压块和气囊输入控制律,对角矩阵ϖ(·)为比例微分常数,η(·)为矩阵η 的元素. 则

4.2 LQR 最优控制器
以状态空间形式给出的飞艇线性系统式(21),可通过设计LQR 得到状态线性反馈的最优控制律,构成闭环最优控制,其目标函数可由对象状态和控制输入的二次型函数构成

其中,半正定实对称矩阵Ql为控制目标加权矩阵,正定实对称矩阵Rl为输入控制加权矩阵. 其相应控制律为

其中,反馈增益矩阵Kl由Matlab 求解黎卡提方程(Riccati equation)得到.
5 仿真研究
基于飞艇动力学模型和上述设计的控制器,结合实验数据对飞艇的平衡航迹镇定与期望输出跟踪进行验证. 飞艇和仿真的相关参数为:g = 9.8 m/s2,ρ=1.29 kg/m-3,my=100 kg,mj=385 kg,Λ=500 m3,ry3=3 m,V0=4 m/s,CX1=10CX0=-2.461,CZ1=2CY1= -9.844,Cl1=Cm1= -Cn1=-1.55,Mf1=Mf2=Mf3=1.25 ×103kg,Jf1=Jf2=Jf3=1.5 ×103kg·m2,CZ0=Cl0=Cm0=Cn0=0,CZδ=Cmδ= -0.587 6,Cnδ=Clδ=CYδ= -0.391 7.
5.1 反馈线性化控制器仿真
图4 和图5 给出PD 参数ϖ(·)= 1 时的飞艇平衡航迹镇定和期望航迹跟踪的验证结果,B-B 指ballast and ballonet.
因仿真结果图4 和图5 中各变量都能很好收敛到表1 对应的平衡值,所以飞艇在经过某一转换飞行段后都能准确平稳的进入下一平衡飞行段,同时各变量在转换飞行时间段内也能匹配好下一段飞行所需的参数值,即该控制器实现了平衡航迹的镇定.
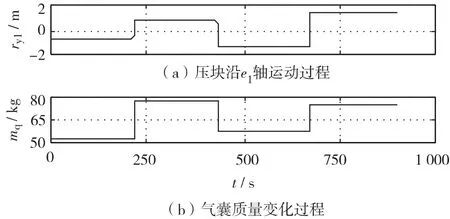
图4 飞艇在反馈线性化控制作用下压块和气囊运动过程Fig.4 Airship movement of B-B with feedback linear control
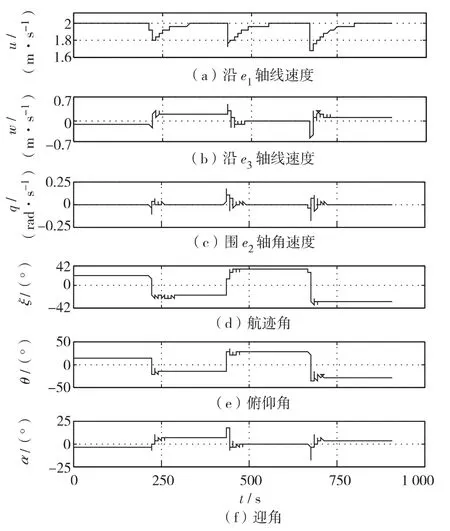
图5 飞艇在反馈线性化控制作用下过渡曲线图Fig.5 Airship transition curves with feedback linear control
最小相位系统的渐近稳定可推广到渐进跟踪,要求受控飞艇能够跟踪期望的输出轨迹,即要求该控制器能使式(22)中yo=0,由仿真结果图4 和表1 可知,该控制器实现了压块和气囊的调整过程对期望值的精确跟踪.
5.2 LQR 最优控制器仿真
当压块(或气囊)需从某一位置(或状态)运动到新位置(或新状态) ,取 为 和 的中点,那么压块(或气囊)运动策略为:从 到 是以加速度为 的匀加速运动,从 到 是以加速度为 的匀减速运动,这样设计可尽量降低压块(或气囊)运动给飞艇带来的动量冲击并设tz为整个运动过程所需的时间.
基于变量最大值、压块和气囊的运动速度以及俯仰角等因素考虑,此处选择Ql= diag[1,0.5,2,2,1,1,0.1,0.1,1,0.5]和Rl= diag[1,1,1],tz= 10 s,选择期望平衡航迹为表1 和图3 中的“上航(3)”. 需特别注明,因LQR 为线性控制器,因此希望其初始航迹(即初始条件)在期望航迹附近,此处选取“上航(1)”为飞艇初始平衡航迹.
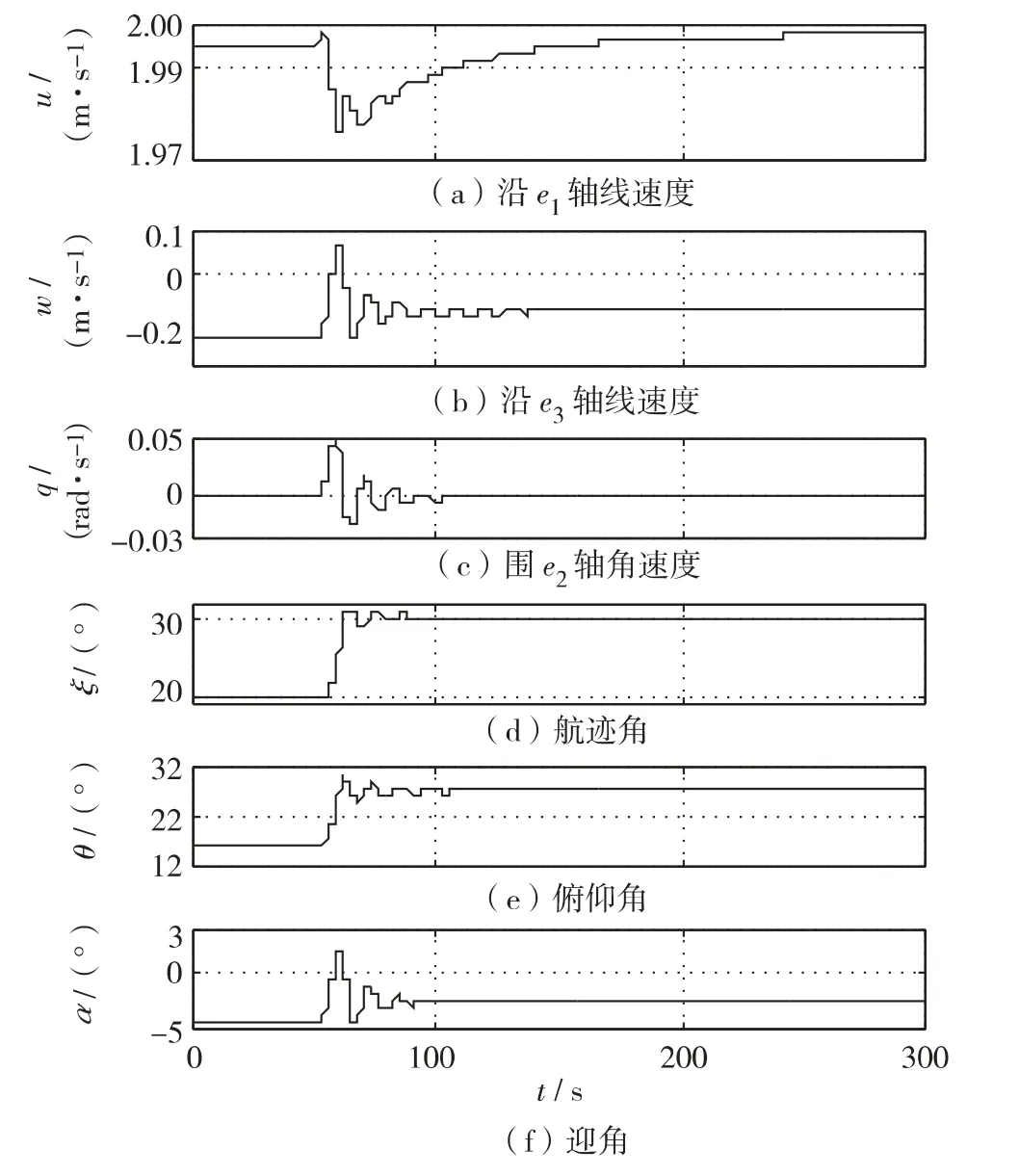
图6 飞艇在LQR 控制作用下过渡曲线图Fig.6 Airship transition curves with LQR control

图7 飞艇在LQR 控制作用下压块和气囊运动过程Fig.7 Airship movement of B-B with LQR control
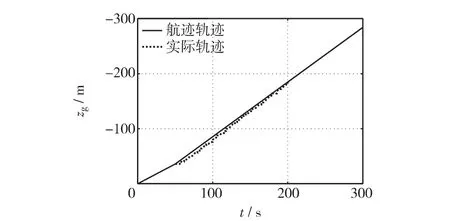
图8 飞艇航迹Fig.8 Airship flight path
由仿真结果图6 ~图8 和表1 可知,当飞艇沿初始平衡航迹飞行50 s 后,转向期望航迹飞行,图中各变量最终都很好的收敛于表1 中“上航(3)”所要求的平衡值,虽然在压块和气囊调整后的约100 s 内,飞艇实际飞行航迹略有偏离期望航迹,但偏离误差随时间越来越小,最终能完全与期望航迹重合,同样实现平衡航迹的镇定. 仿真结果验证了最优控制器LQR 对飞艇系统的有效性及鲁棒性.
结 语
研究一类“压块-气囊”驱动飞艇的动力学6自由度数学模型及控制器设计. 通过将飞艇运动限制在纵向平面得到飞艇纵向平面模型,并对其分别实施非线性反馈变换和小扰动线性化处理,得到控制量为加速度的飞艇模型和线性化模型,从而实现约束力与悬架系统的关联. 所设计反馈线性化控制器和LQR 最优控制器,分别实现飞艇系统的多输入多输出反馈线性化和状态线性反馈最优控制. 通过仿真验证飞艇“锯齿”形航迹的可实现性、反馈控制器对平衡航迹镇定和期望输出跟踪的实现、以及控制器的有效性和鲁棒性.
/ References:
[1]Gomes S B V,Ramos J J G . Airship dynamic modeling for autonomous operation [C]// IEEE International Conference on Robotics & Automation. Leuven(Belgium):IEEE Press,1998:3462-3467.
[2]Liu Yu,Hu Yueming,Wu Yilin. Stability and control analysis based on airship dynamic modeling [C]// IEEE International Conference on Automation and Logistics.Jinan(China):IEEE Press,2007:2744-2748.
[3]Liu Yu. Stratospheric Autonomous Airship:Model,Dynamics and Control [D]. Guangzhou:South China University of Technology,2009.(in Chinese)刘 屿. 平流层自治飞艇:模型、动力学和控制[D].广州:华南理工大学,2009.
[4]Guo Jiangguo. Velocity control system of autonomous airship based on adaptive dynamic inversion [J]. Journal of Astronautics,2008,29(5):1505-1508.(in Chinese)郭建国. 基于自适应动态逆的自主飞艇速度控制系统设计[J]. 宇航学报,2008,29(5):1505-1508.
[5]Mueller J B,Paluszek M. Development of an aerodynamic model and control law design for a high-altitude airship[C]// AIAA Unmanned Unlimited Conference. Chicago(USA):[s.n.],2004:1-17.
[6]Fang Cunguang,Wang Wei. Pitching attitude dynamics modeling and its control of unmanned dirigible airship[J]. Control Theory & Applications,2004,21(2):231-238.(in Chinese)方存光,王 伟. 自主飞艇俯仰角姿态动力学建模及控制[J]. 控制理论与应用,2004,21(2):231-238.
[7]Cai Zili,Qu Weidong,Xi Yugeng. Dynamic modeling for airship equipped with ballonets and ballast [J]. Applied Mathematics and Mechanics,2005,26(8):1072-1082.
[8]Liu Yu,Wu Yilin,Wu Xiaotao,et al. Modelling and analysis of autonomous stratospheric airship [C]// The 29th Chinese Control Conference. Beijing:IEEE Press,2010:1293-1298.
[9]Leonard N E,Graver J G. Model-based feedback control of autonomous underwater gliders [J]. IEEE Journal of Oceanic Engineering,2001,26(4):633-645.
