月球着陆环境模拟试验装置的研制
2013-12-21郑兴林
徐 冰,马 龙,郑兴林
(北京空间机电研究所,北京100076)
0 引言
月球着陆器的着陆多采用机械式软着陆缓冲机构方式,确保其着陆稳定性是任务首要目标[1]。在接近月面的着陆最终阶段,需要关闭轨控发动机和姿控推力器,而在关机之前,须通过伽马关机敏感器精确测定离月面的高度,并根据该高度值向着陆器发出关机指令。因此,伽马关机敏感器的性能直接影响着陆器的着陆稳定性,对着陆任务成败起关键作用。为了提高伽马关机敏感器的性能和工作可靠性,需要在地面开展空间环境模拟试验,包括标定试验和性能测试试验。
针对伽马关机敏感器的试验需要,文章着重介绍月球着陆环境模拟试验装置的研制情况。
1 伽马关机敏感器的环境影响因素分析
在特定的模拟环境中,需要对月球着陆器在距地表4.5 m 高度下进行着陆运动模拟,同时对相关设备以及伽马关机敏感器进行测试。
月球表面环境和地球表面环境差异较大,伽马粒子会与大气中的各种分子撞击发生反散射,从而使接收器接收到的伽马粒子数发生变化(见图1)。因此,伽马关机敏感器在两种环境条件下发出的高度指令存在差异。俄罗斯的研究结果表明,大气对接收器计数率的影响最高可达30%左右,从而导致 很大的结果偏差。在地球大气环境下进行的伽马关机敏感器的各种高度标定以及性能测试结果不能直接应用到月球环境中。根据大气对伽马粒子传播的影响以及伽马关机敏感器的工作原理,当大气压力≤10 Pa 时,其影响可忽略。

图1 大气对伽马关机敏感器影响Fig.1 Effect of atmosphere on the gamma sensor
同样,月壤和地球土壤的密度与含水量等不同,它们对伽马粒子的散射性能也不一样,对伽马关机敏感器的计数率也会产生很大影响,最终导致在地球表面标定的关机指令高度和月面实际关机高度有偏差。
为了确保伽马关机敏感器的实际指令高度满足设计要求,就必须在模拟月壤的真空环境下进行敏感器的高度标定与性能测试。
2 试验装置的设计
为了在4.5 m 高度下模拟月球着陆器的着陆运动,试验装置应包含有三维着陆模拟系统。根据伽马关机敏感器的发射角度和伽马射线对月壤的穿透深度,可以推导出模拟月壤的有效直径应不小于10 000 mm、厚度应不小于300 mm,因此,该装置属于超大型真空环境模拟设备。
模拟月壤采用与月壤一次康普顿散射特性相同的火山灰,其含水量低于1%,因此极易受到外界环境扰动产生腾起现象,在真空系统的设计中需要重点考虑。目前超大型真空设备获得高真空通常采用低温冷凝泵和分子泵来实现,而模拟月壤所用的火山灰微粒对这类泵会产生严重的危害[2-3],甚至使其无法正常工作。由于工作真空度只要优于10 Pa 就可以满足伽马关机敏感器高度标定的环境试验要求,因此可以不使用低温冷凝泵和分子泵。
月球着陆环境模拟试验装置由真空容器、真空获得系统、三维着陆模拟系统、模拟月壤环境、场景监视系统以及测控系统组成。该试验装置不仅可以用于伽马关机敏感器的高度标定以及性能测试试验,而且还能够用于月球着陆器的系统级着陆模拟试验。该装置的主要技术指标如下:
1)真空容器有效尺寸为φ11 000 mm×9 500 mm(柱段高);
2)极限真空度优于1 Pa,工作真空度优于10 Pa;
3)模拟月壤铺设面积为φ10 m;
4)三维着陆模拟器有效载荷为4 t。
2.1 真空容器
真空容器是该试验装置的主体,是其他系统的交会中心。
真空容器(见图2)为立式圆柱结构,其上端是大门,直径8000 mm,用于大型产品及工装的进出;下端是封头;中间为圆柱段,其直径为11000 mm、 高度为9500 mm,在侧壁上开有φ5000 mm 的侧门,用于产品、工装以及人员的进出。

图2 真空容器示意图Fig.2 The vacuum vessel
真空容器选用0Cr18Ni9 材料,容器基本参数见表1。

表1 容器基本参数Table 1 Basic parameters of the container
为了保证开孔后容器的整体稳定性,在工艺上采取一系列措施,如:在开孔处采用加强筋补强;在开孔与容器的相贯线内表面采用圆角过渡,而外表面实施堆焊[3-4]。完成容器结构设计后,采用有限元分析软件对容器进行校核,校核结果如图3所示。

图3 容器应力及形变量云图Fig.3 Stress and deformation contours of the container
为了确保真空容器的密封性能,对所有焊缝除了进行X 光照相外,还要逐段进行100%检漏。
2.2 真空获得系统
根据系统的真空度要求,真空获得系统的构成如下:前级泵为LG150 无油干泵,次级泵为ZJQ600直排大气罗茨泵,后级泵为ZJP2500 罗茨泵;且所选用泵组均具有抽取烟气和粉尘功能,火山灰微粒不会对泵产生危害。真空获得系统为两套真空泵机组组成,其抽速为5000 L/s。
在抽真空和复压过程中,为了防止真空室内气体湍流作用导致严重的火山灰腾起现象,须采取如下措施:
1)抽气口和复压口远离模拟月壤区域,并在气口处采取多层逐级遮挡措施,防止气流产生较大的局部扰动;
2)抽真空和复压的速率不宜过大,根据缩比试验计算得到最大抽气速率≤5000 L/s,最大复压速率≤10 Pa/s,否则容易产生火山灰腾起现象。
系统工作时,首先启动LG150 无油干泵和ZJQ600 罗茨泵,将容器内压力从1 个大气压抽至1×103Pa 后,再启动ZJP2500 罗茨泵抽真空至10 Pa。粗抽主管口径为400 mm、长约8 m;粗抽泵与主管之间相连的支管口径为400 mm、长8 m。真空容器容积约为1200 m3,经估算该真空获得系统抽真空到10 Pa 的时间约为3 h,但考虑到模拟月壤的影响,须采用较小的抽速,所以实际抽气时间大于3 h。模拟月壤制作时已进行72 h 的真空烘烤除气,充分去除火山灰微粒附着的气体分子和水分,因此试验抽真空过程中模拟月壤的出气主要来源于火山灰颗粒之间缝隙中的气体。本设备所用的模拟月壤颗粒之间缝隙的含气量约为50%~60%,因此直径10 000 mm、厚度500 mm 的模拟月壤所产生的出气量会导致真空抽气时间延长至6~7.5 h。
2.3 三维着陆模拟系统
在模拟着陆试验过程中,三维着陆模拟系统将携带着装有伽马关机敏感器的模拟着陆器进行三维运动,能够以不同速度模拟在接近月球表面最后4.5 m 的下降过程。三维着陆模拟系统在真空环境下需具备三维运动和精确控制的能力,并具有无油润滑、防真空放电等诸多特性,其设计考虑如下:
1)在真空容器的内壁上安装支撑主梁,用于三维着陆模拟系统支撑;
2)有效载荷质量不小于4 t,其外型尺寸的高为2.16 m、最大投影直径4.88 m;
3)各方向有效运动行程:x、y方向均为±3.5 m,z方向为保证吊钩最下沿距容器地面不低于6.5 m;
4)各方向运动速度连续可调;
5)润滑采用挥发性低的润滑材料;
6)机构各构件外表面要尽量进行着黑处理,以减小背景噪声影响;
7)采用远程控制实现行走机构的三维运动、回零、定位移动等功能的实时控制。
系统运动控制原理为:
1)在各方向上利用闭环控制的伺服电机及减速器驱动精密丝杆,通过丝杆上的光栅尺读数,将系统的运动参数与控制系统指令参数时时对比,实现移动位置的精确自动修正;
2)同时在系统中加进软启动变频调速功能,并将激光测距传感器固定在支架结构上,向真空室顶部发射激光束进行实时测距,以提高系统的平稳性和可靠性。
系统结构如图4所示。

图4 三维着陆模拟系统图Fig.4 3D landing simulation system
2.4 模拟月壤环境
在真空容器中的月壤支撑平台上建立模拟月壤环境。月壤支撑平台是一个有效直径为10 000 mm 的圆形平台结构,主要由拼装式围板组成。平台支撑结构是可拆卸“井”字型框架,安装在容器壁底部的装配固定点处。平台中间附近空白处设置可调节高度的支撑杆,并起到辅助支撑作用。模拟月壤环境状态如图5所示。
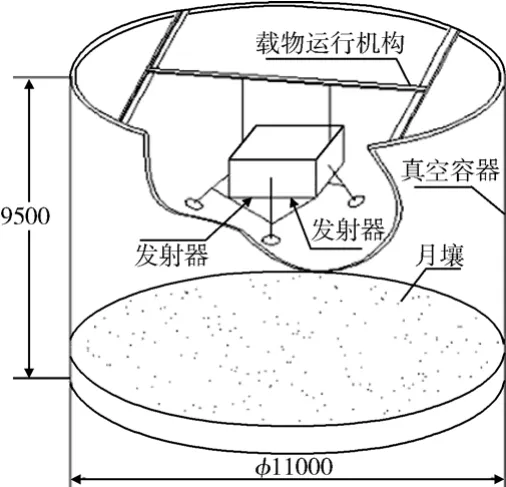
图5 模拟月壤环境状态示意图Fig.5 Lunar soil simulation environment
对月壤样品进行分析发现:密度范围基本上在1.3~1.7 g/cm3,在月壤表层,其密度约为1.3 g/cm3;在深度为100 mm 时,密度增大到1.5 g/cm3以上[5],即月壤密度随深度的增加而增大。伽马粒子与表层月壤发生康普顿散射,散射粒子的数量和能量与月壤的密度有关,因此月壤密度是影响伽马粒子康普顿散射效应的主要因素。
试验所用模拟月壤的颗粒级配见表2。总的模拟月壤厚度为500 mm,随着深度增加密度逐渐增大,大颗粒火山灰含量也相对增多。若伽马关机敏感器关机高度为3 000 mm,由于向月面发射伽马粒子的锥角为119°左右,所以在月面的照射范围为φ10 000 mm 左右。

表2 火山灰颗粒级配表Table 2 Ash particle grading
2.5 场景监视系统
伽马源属于放射性物质,试验过程中所有操作均须保证一定的安全距离,因此在容器内安装场景监视系统,用于实时监控和记录真空容器内试验装置及产品的工作状态,并能够事后追溯、还原工作过程。
整套系统采用高清晰智能实时摄录设备,可多路实时监视并具备以下功能:单/多画面切换;实时录像,自动定时,动态检测录像,随时检索;录像存储方式包括DVD 刻录和硬盘机;摄像头与控制云台可在真空环境下工作,活动部件采用无油污染润滑。
2.6 测控系统
测控系统主要服务对象为真空获得系统、三维着陆模拟系统以及场景监视系统,可全面掌握设备运行状态及试验测试数据,将各分系统的运行状态以数据和图像两种形式发送到总控制间,从而实现高效、安全的闭环控制。
2.7 防止月壤腾起的设计
为了从根本上解决模拟月壤腾起问题,除了降低抽气速度、在抽气口和复压口处设置遮挡措施之外,还在真空室内安装了月壤防爆腾装置。该装置采用尼龙绸布遮挡在月壤上,并固定在圆形月壤支撑平台外侧导轨的支座上。支座中一个为固定支座,其余均可在圆形导轨上自由滑动。试验开始前,将尼龙绸布绷紧固定在支座上,与容器内壁上安装的尼龙布拖动机构连接,使月壤平台完全被尼龙绸布所遮挡。当容器内的真空度达到试验要求时,再利用电驱动机构将尼龙布拖至月壤平台外侧,使暴露的模拟月壤面积完全满足伽马粒子照射的要求(参见图6)。

图6 模拟月壤防腾起装置示意图Fig.6 The equipment for preventing the soaring of lunar soil simulant
3 结束语
月球着陆环境模拟试验装置是我国第一套具有综合功能的大型试验设备,在真空环境中既建立了模拟月壤环境,还配备了三维着陆模拟系统以及完善的自动测控管理系统。该试验装置具有广阔的应用前景,不仅可以用于当前月球着陆伽马关机敏感器的高度标定和性能测试试验,而且能够用于月球着陆器系统级月面着陆模拟试验以及未来的火星着陆技术的研究。
若在该试验装置上增设低温热沉,除了真空和模拟月壤环境之外,还可以实现低温甚至高低温循环环境,为各种着陆技术的研究提供更加真实的试验环境,有助于进一步评价着陆器的性能和可靠性。
(References)
[1]蒋万松, 黄伟.月球着陆器着陆稳定性仿真分析[J].航天返回与遥感, 2010, 31(6):16-22 Jiang Wansong, Huang Wei.Simulation analysis of landing stability for lunar lander[J].Spacecraft Recovery &Remote Sensing, 2010, 31(6):16-22
[2]黄本诚, 马有礼.航天器空间环境试验技术[M].北京:国防工业出版社, 2002
[3]黄本诚.空间模拟器设计[M].北京:中国宇航出版社, 2009
[4]达道安, 李旺奎.空间真空技术[M].北京:中国宇航出版社, 2009
[5]邹猛, 李建桥, 刘国敏, 等.模拟月壤地面力学性质试验研究[J].岩土力学, 2011, 32(4):1057-1061 Zou Meng, Li Jianqiao, Liu Guomin, et al.Experimental study of terra-mechanics characters of simulant lunar soil[J].Rock and Soil Mechanics, 2011, 32(4):1057- 1061
