“天宫一号”目标飞行器信息管理策略
2013-12-21柏林厚李智勇南洪涛
柏林厚,李智勇,南洪涛,程 伟
(中国空间技术研究院 载人航天总体部,北京 100094)
0 引言
“天宫一号”目标飞行器的主要任务是作为交会对接目标完成交会对接试验,并为我国建立长期载人空间站进行技术验证。信息系统作为支持目标飞行器在轨飞行任务的重要功能系统,主要完成目标飞行器内部信息管理以及与地面和载人飞船的通信管理[1]。它一方面以各电子设备或组合的形式完成目标飞行器各功能单元的信息采集和控制,另一方面采用通信技术沟通内部各功能单元之间、各舱之间以及与飞船和地面之间的联系,形成信息共 享的整体,确保目标飞行器的健康和稳定运行,支持目标飞行器各项任务的完成。
本文对“天宫一号”目标飞行器信息系统的信息管理策略进行了概述,包括信息管理需求、设计原则、系统组成、主要技术特点以及可靠性安全性设计。
1 信息管理需求
1.1 任务需求
根据任务需求分析,信息系统的信息管理需求概括如下(图1)。
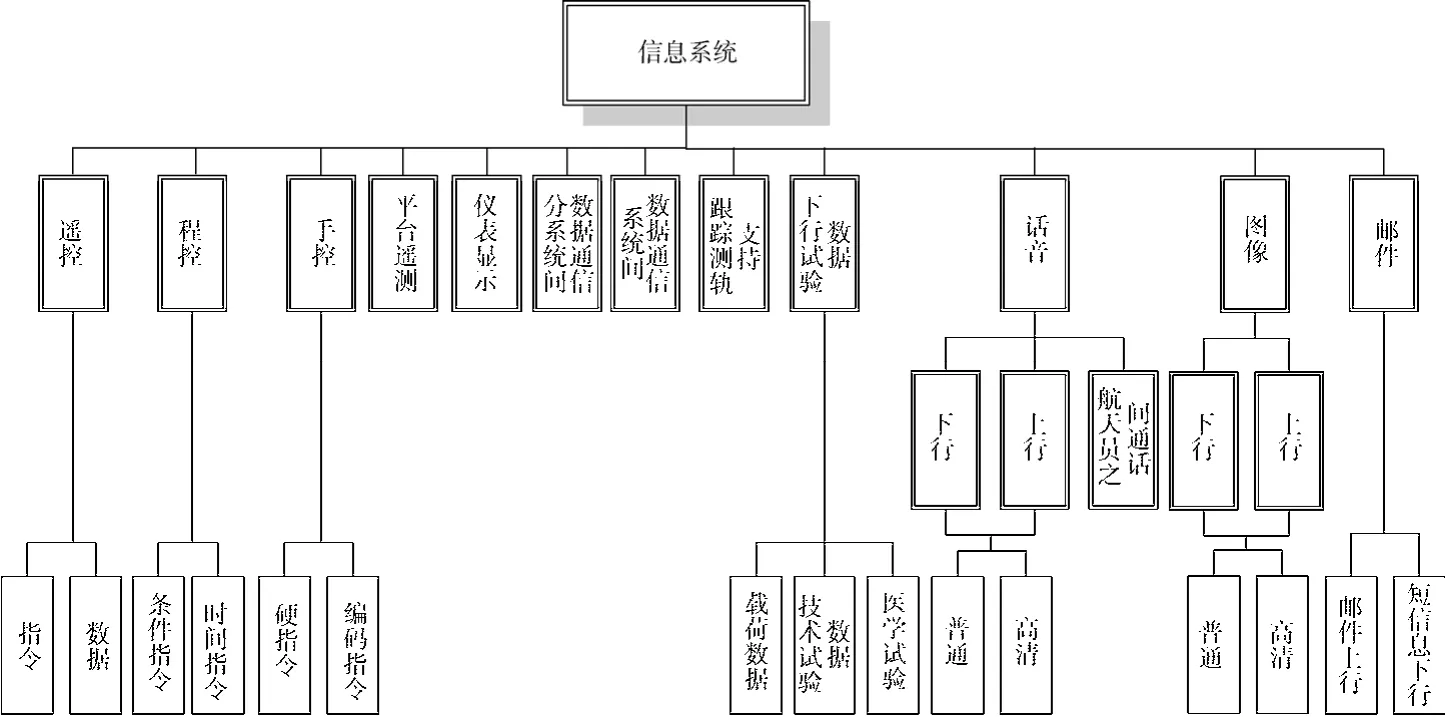
图1 信息管理需求Fig.1 The requirements of the information management
1)遥控:接收地面遥控指令及注入数据,转发至相应用户;
2)程控:根据时间或条件,实现平台程序化自主控制;
3)手控:为航天员提供手动控制接口;
4)平台遥测:采集平台实时遥测(测控区内)和延时遥测(测控区外)数据,下行至地面;
5)仪表显示:采集航天员需求的数据并显示;
6)分系统间数据通信:完成GNC、数管、测控、推进、电源分系统间的数据通信;
7)系统间数据通信:整个飞行阶段,完成目标飞行器与地面之间的双向数据通信;在交会对接和组合体飞行阶段,完成目标飞行器与飞船之间的双向数据通信;
8)跟踪测轨支持:在轨运行期间配合地面完成测定轨;
9)下行试验数据:采集试验数据,并下行至地面;
10)话音需求:实现航天员与地面,以及航天员之间的话音通信;
11)图像需求:实现地面对舱内外图像的监视,实现航天员与地面之间的双向视频通信;
12)邮件需求:实现航天员与地面之间的邮件交互。
1.2 性能指标需求
信息系统的主要指标需求如下:
1)遥测数据传输速率最大达到600 kbit/s;
2)试验数据传输速率最大达到100 Mbit/s;
3)指令空间不少于2 000 条;
4)遥测传输误码率不大于10-5;
5)单路高质量图像数据传输速率为1.92 Mbit/s;
6)单路高质量话音数据传输速率为192 kbit/s;
7)最大中继下行速率不小于144 Mbit/s。
1.3 扩展需求
信息系统设计考虑一定的可扩展性,需支持平台和试验数据的动态组帧以及平台新设备的动态接入。
2 信息管理策略
2.1 设计原则
1)适应我国目前已有的测控体制
我国目前成熟的测控体制是USB 测控体制,在载人航天一期工程中得到了成熟应用,目标飞行器的测控体制应适应此体制。
2)对交会对接相关功能进行一体化设计
为完成交会对接、分离和组合体任务,目标飞行器和载人运输飞船信息管理需要进行一体化设计。
3)设计继承原则
载人航天一期工程采用了1553B 总线、同步和异步串口通信、复接、仪表编码指令等技术,并经过了多次飞行试验的验证。为保证“天宫一号”目标飞行器信息系统的可靠运行,应尽可能地继承成熟技术,建成一个可靠的信息系统核心。
4)裕量设计原则
在指令空间、遥测能力、天地间通信链路的信道容量、1553B 总线的通信流量、总线终端的数量等方面设置裕量。
5)适当的新技术应用验证
为满足载人航天后续任务和型号的需要,目标飞行器在继承成熟技术构建信息系统核心功能的同时,应考虑验证信息系统的新技术和先进技术,主要包括中继星通信技术、CCSDS 技术、1394 总线技术和LVDS 总线技术。
6)冗余设计原则
系统层次的可靠性设计手段主要为冗余设计,要求核心功能必须有冗余。
7)简单化原则
降低目标飞行器总体设计的复杂度,采用总线技术降低设备之间的直接连接从而降低系统复杂度。
8)产品化设计原则
遥控、遥测、手控设备采用产品化或飞船验证过的产品。
2.2 系统组成及功能
“天宫一号”目标飞行器的信息系统(如图2所示)由以下6 个功能子系统组成,子系统配合实现整个飞行器的信息管理。
1)平台测量与控制功能子系统。完成设备的参数测量和采集、指令控制、分系统及系统间数据通信,具体负责:设备的模拟量参数测量及数字量参数的采集,并将获得的参数组帧、调度后输出给天地测控与通信接口功能子系统;控制天地测控与通信接口功能子系统在测控区内实时下行遥测数据,在测控区外存储遥测数据并延时下行;接收天地测控与通信接口功能子系统输入的遥控指令和遥控数据,将开关指令发送给执行部件或者设备,将遥控数据分发给相应的设备;按照飞行程序发送时间指令、条件指令及广播时间和事件信息,以及根据遥控数据更新飞行程序;将航天员的手控指令发送给执行部件或者设备;将飞行器相关数据显示给航天员;实现相关分系统及系统间的数据通信。
2)天地测控与通信接口功能子系统。完成目标飞行器与地面、中继卫星以及飞船之间的双向数据通信,具体负责:接收地面上行的数据,进行数据处理和分路后,将指令和遥控数据送平台测量与控制功能子系统,将图像数据送图像通信功能子系统,将话音数据送话音通信功能子系统;接收图像通信功能子系统的下行图像数据,接收话音通信功能子系统的话音数据,接收试验设备的试验数据;接收平台测量与控制功能子系统获取的实时及延时平台遥测数据,将数据合路和处理后通过通信机直接或者间接下行到地面;支持对目标飞行器的跟踪测轨功能。
3)高速试验数据管理功能子系统。完成目标飞行器试验数据的管理,具体负责:试验数据的采集、组帧,将试验数据送平台测量与控制功能子系统进行存储,然后送天地测控与通信接口功能子系统下行;通过平台测量与控制功能子系统接收控制指令,对试验终端设备进行指令控制;采集试验终端设备状态数据并组帧,然后将数据送平台测量与控制功能子系统,通过天地测控与通信接口功能子系统下行。
4)图像通信功能子系统。完成天地图像传输,具体负责:摄取舱内外图像、进行编码处理后送天地测控与通信接口功能子系统,同时送液晶显示器显示;接收天地测控与通信接口功能子系统输入的地面上行图像数据,进行解码处理后恢复出图像和伴音,图像送液晶显示器显示,伴音送话音通信功能子系统。
5)话音通信功能子系统。完成天地话音通信和航天员间的话音通信,具体负责:采集航天员话音、进行编码处理,然后送天地测控与通信接口功能子系统下行,同时送图像通信功能子系统作为图像伴音;接收天地测控与通信接口功能子系统输入的上行话音数据,进行解密和解码处理后恢复出话音信号并播放给航天员;实现航天员之间的话音通信。
6)交会对接及组合体信息支持子系统。完成交会对接和组合体期间目标飞行器与飞船之间的信息交互;完成地面测控点频在飞船一方时,地面与目标飞行器之间的数据传输,以及点频在目标飞行器一方时,地面与飞船之间的数据传输。

图2 信息系统组成框图Fig.2 The configuration of the information management system
2.3 技术特点
“天宫一号”目标飞行器信息管理策略借鉴了载人航天一期工程中飞船的设计方法,包括1553B总线管理体制[2]、天地无线链路通信管理体制等,但由于系统需求相对飞船发生了较大的变化,所以设计上又有着自身的技术特点,主要包括以下几个方面。
1)平台数据管理特点:目标飞行器1553B 总线终端设备多,平台遥测数据量大。目标飞行器总线终端为26 个,接近单套1553B 总线所能管理的极限。为了对26 个总线终端进行可靠的管理,同时也为了验证空间站多层总线结构,目标飞行器配置了2 套1553B 总线对平台数据进行管理。此外,目标飞行器平台遥测数据传输速率最大达到600 kbit/s,相对于一期飞船平台遥测数据量有了很大的增加。为了适应数据的灵活复接,实现数据的动态调度管理,也为了适应后续空间站发展的需要,目标飞行器采用高级在轨系统协议[3],通过分包遥测的形式完成数据汇集,经过符合空间数据系统咨询委员会(CCSDS)建议的高级在轨系统(AOS)的格式化形成统一数据流。
2)数据存储回放特点:目标飞行器测控资源有限,在自主运行段,处于测控区外的时间最长达13 h。为了保证遥测数据的完整性,需对飞行器整个在轨过程中的状态进行监视。因此,在测控区外需要对平台遥测数据进行存储,待进入测控区后进行延时数据的回放;同时,由于试验数据无实时性要求,为了方便试验数据的管理,试验数据均进行存储后再下行至地面。因此,目标飞行器采用数据回放技术,完成测控区外平台遥测数据的存储记录,测控区内、外试验数据的存储以及测控区内遥测数据和试验数据的回放控制。
3)试验数据管理特点:目标飞行器信息系统不仅负责平台遥测数据的管理,还需要负责高速试验数据的管理。由于在目标飞行器上开展空间科学试验的数据量巨大,传输速率最大达到100 Mbit/s,所以配置了空间试验平台[4],采用1394 高速总线[5]以及LVDS 串行总线进行数据的采集,其中1394高速总线系统将试验管理设备以及试验设备连接起来,在试验管理设备的统一调度下完成试验设备的数据采集和管理;LVDS 总线完成高速数据与中继链路设备之间的数据传输,通过高速中继链路将试验数据下行地面。
4)组合体及交会对接信息管理特点:目标飞行器作为对接目标,需要完成与飞船之间的信息交互管理,配合完成交会对接任务。设计空-空通信和并网总线两条链路用于交会对接及组合体飞行期间载人飞船与目标飞行器之间的信息通信,并根据地面测控点频跟踪情况进行链路切换。当地面测控点频跟踪载人飞船时,使用空-空通信链路和对接总线链路;当地面测控点频跟踪目标飞行器时,使用对接总线链路。
5)自主管理特点:目标飞行器测控资源有限,为了保证测控区外发生紧急重大故障时目标飞行器的平台安全,设计自主故障诊断处置的安全模式[6]。当发生影响平台安全且实时性处理要求较高的故障时,飞行器转入安全模式,自主进行一系列的处置,以确保飞行器供电、姿态、推进剂、天地通信链路以及载人环境等的安全。
6)图像系统特点:目标飞行器需要配合飞船完成交会对接,同时支持航天员在组合体驻留。为了更直观地观察交会对接过程,同时支持航天员与地面间的图像通信,设计了目标飞行器图像系统,设置多个摄像机进行舱、内外拍摄并根据需要进行切换,选择高、低速两套图像压缩编码方式,以同时适应高质量图像拍摄以及航天员与地面间的视频通信需求。
2.4 可靠性安全性设计
1)可靠性设计
结合目标飞行器长期在轨飞行、短期有人照料的特点,把可靠性设计思想应用于信息管理策略中:尽量消除单点故障模式设计,对重要的设备和功能进行冗余设计;冗余备份设计时采用独立设计,以防止共模失效;设计力求简单、可靠,尽量采用成熟的可靠技术或现成的可靠产品。
结合以上设计思想,对信息系统进行了以下可靠性方面的设计:
① 平台测量与控制功能子系统。在平台核心网1553B 总线网的设计时,每套总线均包括A、B两条总线,且两条总线是完全备份的关系:当其中一条总线发生故障时,可自主切为另一条总线工作;为了避免故障耦合现象的发生,A、B 总线与用户之间的接口采用不同的形式。同时在设计总线用户时,考虑对总线上的重要用户通过双机冷备份的方式进行冗余设计,设备对总线的接口也采用备份冗余,以减少单点故障的存在。数据采集设计时,对于重要的数据通过数管采集、工程遥测采集以及分系统自行采集的形式进行备份设计,采集途径相互独立。对于关键事件,指令发送方式具备多种手段,且对发令设备也进行了备份设计。对关键传感器,例如,舱内总压、氧分压、二氧化碳分压以及温湿度传感器等都设计为3 取2 模式;液路温度传感器、感烟探测器、差定温差探测器等传感器配置在舱内不同位置,每种互为备份。
② 天地测控与通信接口功能子系统。天地通信信道包括USB 信道、S 波段数传信道、中继KSA信道、中继SSA 信道以及空-空通信信道等多种信道,上下行数据可以通过不同的信道到达地面或者目标飞行器,这些信道相互独立,在飞行过程的不同阶段可以对传输的数据起到备份的功能。
③ 图像通信功能子系统。设计视频编码器和视频处理器,分别完成图像的中低质量和高质量的编码,这两种质量的图像体制可以互相备份;对于视频切换器设置2 个通道,在一个通道故障时,可以采用另一个通道进行图像下传;同时在视频切换器内设置一个直通通道,把舱内一路图像直通到视频编码器,在视频切换器故障时直接选用此路图像下传。
④ 话音通信功能子系统。话音分配中的指挥话和专用话通道可以起到备份的功能;同时当目标飞行器进入中继测控区时,上行图像伴音可以对话音起到备份的作用。
⑤ 交会对接及组合体信息支持子系统。在组合体飞行期间,两飞行器间的数据可以通过空-空通信链路和对接总线链路两种独立的链路进行通信。
2)安全性设计[7]
① 设计显示及报警的功能。对关系到航天员生命安全的数据进行显示,当数据越限时,产生报警音及时通知航天员,同时航天员可以通过手控指令(开关指令或编码指令)对影响自身安全的事件进行控制。
② 自主飞行管理期间,为了保证目标飞行器安全运行,设计自主安全模式,当在轨出现影响平台安全且实时性处理要求较高的故障时,目标飞行器自主进行处置,转入安全模式运行,以确保飞行器的供电、姿态、推进剂、天地通信链路及载人环境安全。
3 结束语
“天宫一号”目标飞行器发射至今执行了独立自主飞行期间的任务,并配合“神舟九号”和“神舟十号”载人飞船分别完成了首次无人和有人交会对接任务,任务期间信息系统工作正常,所采用的信息管理策略得到了验证,满足各项飞行任务对信息的使用需求,为后续空间站信息管理策略的详细设计奠定了基础。
(References)
[1]戚发轫, 朱仁璋, 李颐黎.载人航天器技术[M].北京:国防工业出版社, 2002
[2]GJB 289A—1997 数字式时分制指令/响应型多路传输数据总线[S]
[3]Advanced orbiting systems, networks and data links:architectural specification, CCSDS 701.0-B-3[R], 2001
[4]梁建辉, 金海丁, 孙永进, 等.航天器公用空间搭载试验平台设计[J].航天器环境工程, 2011, 28(6):521-524 Liang Jianhui, Jin Haiding, Sun Yongjin, et al.Design of a general flight experimental platform for spacecraft[J].Spacecraft Environment Engineering, 2011, 28(6):521- 524
[5]IEEE STD-1394A IEEE standard for a high performance serial bus-amendment[S], 2000
[6]李智勇.“天宫一号”目标飞行器系统级自主安全设计[J].航天器环境工程, 2011, 28(6):525-528 Li Zhiyong.Design of systemic autonomous safety for Tiangong-1 target spacecraft[J].Spacecraft Environment Engineering, 2011, 28(6):525-528
[7]QJ 2236A—1998 航天产品安全性保证要求[S]
