一种新的变步长LMS自适应算法
2013-12-18杨飞飞阴亚芳
杨飞飞,阴亚芳
(西安邮电大学电子工程学院,陕西西安 710121)
自适应滤波是现代信号处理的重要组成部分。20世纪60年代由Widrow和Hoff提出最小均方误差(Least Mean Square,LMS)算法。由于其结构简单、计算量小、易于实时处理,因此,在噪声对消、谱线增强、系统辨识等方面得到广泛应用[1]。
针对传统的LMS算法中收敛速度、时变系统的跟踪能力和稳态误差之间的矛盾[2],人们作了各种改进[1-11],提出了多种变步长LMS算法。变步长的自适应滤波算法的指导思想为[3]:在迭代初始阶段或未知系统参数发生变化时,应使用较大的步长,以加快收敛速度或提高对时变系统的跟踪能力;而在算法逐渐进入稳态时,无论主输入端有多大的干扰信号,都保持较小的步长以达到较小的稳态失调误差。文献[4]中提出的S函数变步长LMS算法,其步长μ是误差e(n)的Sigmoid函数,由于 Sigmoid函数过于复杂,且在e(n)接近于零处变化过大,不具有缓慢变化的特性,使得该算法在自适应稳态阶段仍有较大的步长变化,从而影响稳态误差[5]。文献[6]通过改进文献[4]的算法,提出了新的变步长自适应算法,该算法简单且在参数稳定后具有缓慢变化的特性,进一步减小了稳态误差。但是,该算法在提高收敛速度的性能上依然存在不足。
本文针对以上问题,在文献[7]的基础上提出了一种新的改进LMS算法,更好地解决了加快收敛速度和减小稳态误差之间的矛盾。
1 LMS改进算法的提出
1.1 LMS自适应滤波
自适应滤波的原理如图1所示。
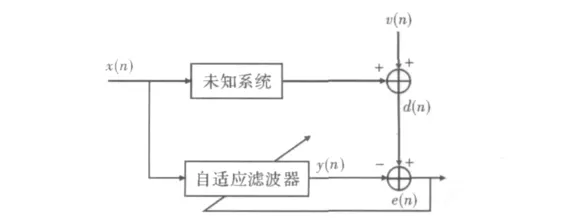
图1 自适应滤波器原理框图
基本的LMS算法的迭代公式为


式(1)和式(2)中,x(n)为n时刻输入信号矢量;W(n)是n时刻自适应滤波器的系数;e(n)是误差信号;d(n)是期望信号;v(n)是测量噪声;μ是迭代步长。LMS算法的收敛条件是1<μ<λmax,其中,λmax是输入信号自相关矩阵的最大特征值。
1.2 改进的变步长LMS算法
文献[7]中的步长更新公式为

式中,μ(n)为步长;e(n)为误差信号,常数α控制双曲正切函数的形状,常数β控制函数的取值范围,常数h用来改善函数底部形状。
从上式可以得到

由文献[7]得出,h越大上式中μ(n)函数的底部越平缓,步长在误差接近零时具有更缓慢的变化趋势,在稳态时误差也更小。而当h过大时,(h/h+1)近似等于1。这里,假设γ=α/ln(h+1),所以上述公式可以写做

由于LMS算法的收敛条件为[8]0<μ(n)<式中,R=E{x(n)xT(n)},tr[R]为矩阵R的迹。因此,只要限制就能满足LMS算法收敛。
由变步长自适应算法的指导思想[3],可以进一步改进算法,使得β正比于误差e(n,即e(n越大β越大越小β越小。这样,在迭代初始阶段较大,对应β较大,可得到较大步长μ(n),从而获得较快收敛速度;当算法逐渐进入稳态时,逐渐地变小,对应β也随之变小,从而μ(n)更小,由此获得更小的超量均方误差。

式中,参数λ是遗忘因子,且0<λ<1;参数η为>0的常数。λ和η的值可依据实际情况来设定。参数γ用于改变双曲正切函数的形状。
这里增加以下约束,以满足算法收敛条件,

2 计算机仿真及分析
为说明新算法的收敛性能以及各参数对算法性能的影响,下面计算机仿真新算法应用于系统识别。
采用的仿真条件为:
(1)自适应FIR滤波器的阶数M=2。
(2)未知系统的FIR权系数为W*=[0.8,0.5]T。
(3)参考输入信号x(n)是零均值、方差为1的高斯白噪声。
(4)v(n)为与x(n)不相关的高斯白噪声,其均值为0,方差为0.04。
为得出每一条曲线,分别做1 000次独立的仿真,采样点数为500,再取统计平均,得到学习曲线。
图2为λ=0.01,η=0.99,γ=5时,不同β时的算法学习曲线,从上到下的3条曲线对应的β值依次为0.01,0.02,0.1。图3 为 γ =5,β=0.1,λ =0.01 时,不同η时的算法学习曲线。由图可知,随着β、η值的变大,算法的收敛速度逐渐提高。
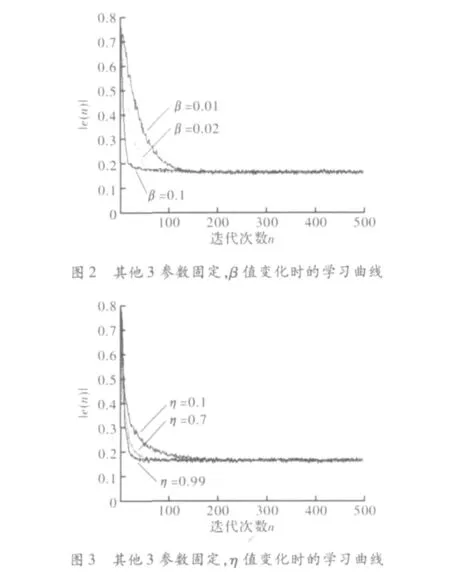
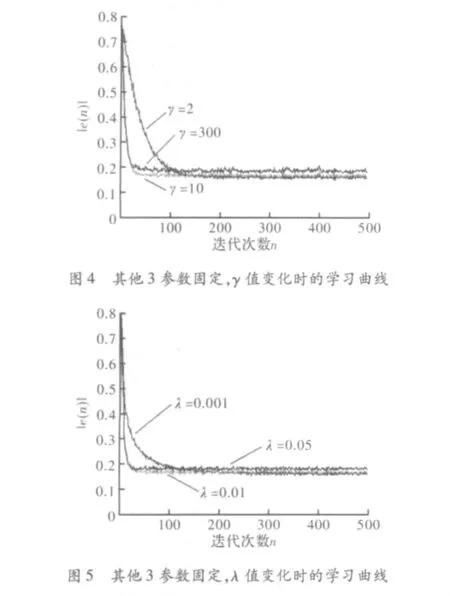
图4为β=0.1,λ =0.01,η=0.99时,γ分别为2,10,300时得出的3条学习曲线。图5为β=0.1,η=0.99,γ =5 时,λ 分别为0.001,0.01,0.05时的算法学习曲线。由图可知,随着γ、λ的增大,算法收敛速度提高的同时,超量均方误差也随着增大。
3 与其他算法的性能比较
下面通过计算机仿真实验对新算法和文献[4,6]提出的算法进行比较,以说明新算法的优越性。
仿真条件与上述实验条件(1)(4)相同,但在第250个采样点时刻未知系统发生时变,系统权系数变为 W*=[0.4,0.2]T。采样点数是 500,分别做 1 000次独立仿真,再取统计平均,得到算法学习曲线。
图6是新算法与文献[4,6]中的算法收敛速度的比较结果。其参数设定为 λ=0.98,η=0.12,β=0.06,γ=6。图7是新算法与文献[4,6]中的算法超量均方误差的比较结果。其参数设定为λ=0.86,η=0.06,β =0.23,γ =30。
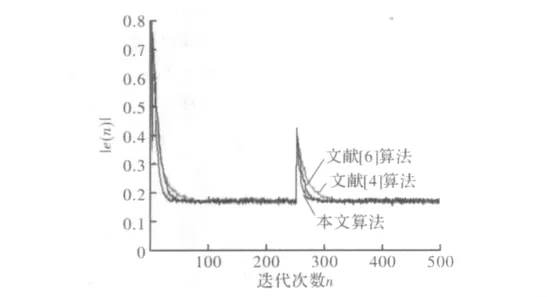
图6 与文献[4,6]算法收敛速度的比较
易得以下结论:在超量均方误差相同时,新算法比文献[4,6]算法的收敛速度更快,如图6所示;而在收敛速度相同的情况下,新算法比文献[4,6]算法的超量均方误差更小,如图7所示。
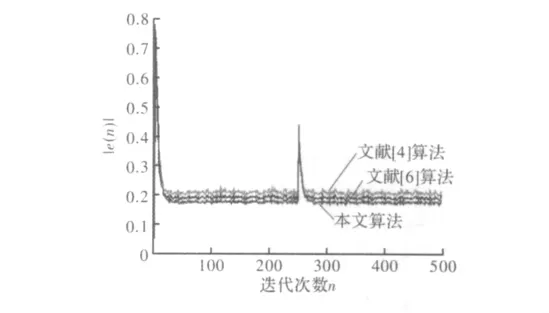
图7 与文献[4,6]算法超量均方误差的比较
4 结束语
本文是在文献[7]中提出的双曲正切函数改进形式的基础上提出的变步长改进算法,算法中β是时变的,是正比于误差信号e(n)的函数,这样在初始收敛阶段算法有较大的步长μ(n)及较快收敛速度;当算法逐渐进入稳定状态时μ(n)变小,由此得到更小的超量均方误差。此算法能更好地解决加快收敛速度和减小稳态误差的内在矛盾。仿真结果也表明,此算法性能优于文献[4]和文献[6]中的算法。
[1]刘杰.一种新的变步长 LMS自适应滤波算法仿真研究[J].微计算机信息,2008,24(1-11):238-239.
[2]吕强,冯驰.一种变步长 LMS算法及其Matlab仿真[J].应用科技,2006,33(6):80 -82.
[3]孙恩昌,李于衡,张冬英.自适应变步长LMS滤波算法及分析[J].系统仿真学报,2007,19(14):3172 -3175.
[4]覃景繁,欧阳景正.一种新的变步长自适应滤波算法[J].数据采集与处理,1977,12(3):171 -194.
[5]盛三元,王建华.一种新的变步长LMS自适应滤波算法[J].华东船舶工业学院学报:自然科学版,2002,16(3):50-52.
[6]高鹰,谢胜利.一种变步长 LMS自适应滤波算法及分析[J].电子学报,2001,29(8):1094 -1097.
[7]张中华,张端金.一种新的变步长LMS自适应滤波算法及性能分析[J].系统工程与电子技术,2009,31(9):2238 -2241.
[8]FEUER A,WEINSTEIN E.Convergence analysis of LMSfilters with uncorrelated Gaussian data[J].IEEE Transaction Acoustics,Speech,Signal Processing,1985(33):222 -229.
[9]张薇薇.一种改进的快速自适应滤波算法[J].西安邮电学院学报,2011,16(3):6 -8.
[10]TANG J,ZHANG S J,WANG J.An improved variable step size LMS adaptive filtering algorithm and its analysis[C].Guilin:Proc.of International Conference on Communication Technology,2006:1 -4.
[11]YAN Yonggang,ZHAO Junwei.An novel variable step size LMSadaptive filtering algorithm based on hyperbolic tangent function[C].ICCASM,2010:233-236.
