我国远洋渔船自动化遥控系统设计模式研究
2013-12-14周国强曲绍东郭庆祝
周国强,曲绍东,郭庆祝
(1.上海开创远洋渔业有限公司 上海市 200090; 2.长海渔港监督处 大连市 116500;3.大连渔港监督局 大连市 116001)
远洋渔业是海洋渔业的重要组成部分。之所以谓之远洋,是指远离本国渔港或渔业基地,在别国沿岸海域或深海从事捕捞活动的渔业生产。我国的远洋渔业起步于1985年,以过洋性渔业为主,远洋渔业的发展取决于本国的经济实力、工业化程度和海洋科学技术水平以及国内外市场、消费水平等因素。
发展远洋渔业有利于减轻和缓和沿岸、近海捕捞强度,合理布局渔业生产力,促进工业、仪器、海洋科学的发展,同时对提高水产品总产量,增加外汇收入,与沿岸国家密切经济联系具有重要的作用。
1 我国远洋渔船装备现状
目前,我国公海作业渔船基本上是购买国外旧船或是将近海渔船改造后投入公海使用。据农业部统计,现有公海作业渔船中50%以上的超低温金枪鱼延绳钓船、大型拖网加工船和金枪鱼围网船船龄均超过20 a。过洋性作业的渔船大部分是20 世纪70—80年代设计建造的近海船舶,总体性能落后、船体状况较差、安全设施不可靠、能耗高、缺乏竞争力。在西非从事过洋性作业的202 艘拖网渔船中,有110 艘船龄超过20 a。远洋渔船技术装备水平偏低,无论是工作母船、辅助船,还是机械装备或助渔导航仪器设备等自动化程度都有待于进一步提高。远洋渔船的破旧和落后严重制约我国远洋渔业的发展,对该问题的解决已迫在眉睫。
2 船舶主机自动化遥控系统控制
船舶自动化领域的一个重要组成部分是主机遥控系统。本文介绍了中国水产(集团)大连渔轮公司设计制造的75 m 远洋金枪鱼围网船舶主机遥控系统,该系统采用PLC 工业控制网络来实现主机遥控系统功能,通过通讯网络实现对主机起停部分的自动控制及安保系统设计。
2.1 PLC 简介
PLC 是一种专门为在工业环境下应用而设计的数字运算操作电子装置。PLC 采用可以编制程序的存储器,在其内部执行逻辑运算、顺序运算、计时、计数和算术运算等操作指令。它以接入式CPU 为核心,通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。PLC 及其外围设备与工业控制系统形成一个整体,程序可以根据控制对象的不同而编制。也就是说,PLC 可编程控制器较其以前的工业控制计算机如单片机工业控制系统,具有更大的灵活性,容易扩展其功能。
2.2 PLC 组成
PLC 系统主要由中央处理器(CPU)、存储器、输入单元、输出单元、通信接口、扩展接口电源等部分组成。其中,CPU 是PLC 的核心,输入单元与输出单元是连接现场输入/输出设备与CPU 之间的接口电路,通信接口用于与编程器、上位计算机等外设连接。
在PLC 中CPU 按系统程序赋予的功能指挥PLC 有条不紊地进行工作,归纳起来主要有以下几个方面:接收从编程器输入的用户程序和数据;诊断电源、PLC 内部电路的工作故障和编程中的语法错误等;通过输入接口接收现场的状态或数据,并存入输入映象寄有器或数据寄存器中;从存储器逐条读取用户程序,经过解释后执行;根据执行的结果,更新有关标志位的状态和输出映象寄存器的内容,通过输出单元实现输出控制。
2.3 主机遥控系统结构和功能
目前,大型船舶的推进装置主要有柴油加推进和电力推进2 类。采用柴油机推进时,直接驱动螺旋桨的柴油机称为主柴油机。主柴油机一般可以在机旁、集控室和驾驶台3 个操作部位进行操作和控制。当离开机旁在集控室和驾驶台操作时,无法通过机旁操纵机构直接操作主机,这就需要在操作部位与主机之间设置一套能够对其进行远距离操纵的控制系统,即为主机遥控系统。
随着船舶自动化技术的发展,装设主机遥控系统的远洋船舶逐年增多。比较完善的主机遥控系统通常设有如下功能(或环节):(1)逻辑程序控制,包括操纵转换位置判断、自动换向、自动起动、重复起动、重起动、制动的逻辑控制;(2)转速与负荷控制,包括转速信号发送速率限制和负荷程序等;(3)安全保护与应急操作;(4)系统功能模拟试验;(5)系统故障自检等。
组成自动控制系统的元件有气动、机械、液压、继电器、接触器、半导体分立元件、小规模集成电路等不同种类,在技术发展的不同阶段,主机遥控系统的类型随采用的控制元件不同而不同。随着微型计算机在控制领域的广泛应用,自20 世纪80年代远洋船舶主机遥控系统普遍采用了微型机作为控制器的核心,使系统的设计、生产、使用和维修都更为简单,可靠性也大大提高。
2.4 PLC 自动化遥控系统总体结构设计模式
大连渔轮公司75 m 金枪鱼围网渔船的PLC自动化主机控制网络,包括2 台S7-200PLC。其中1 台用于主机起停和转速调节控制,安装在机控室;1 台用于完成电子调速器的任务,安装在机舱。另设计算机作为监视平台,用来监视整个系统的重要信号。整个网络的主要设备为:2 台S7-200PLC、1 台微型机、网络连接器、PC/PPI电缆、RS-485 电缆。主站PLC 通讯口出来地总线分别通过网络连接器和PC/PPI 电缆和从站PLC以及计算机通讯。主从站之间通过RS-485 总线进行PPI 协议通讯,主站和计算机终端通过PC/PPI 电缆进行自由口通讯。从主站PLC 通讯口出来连接上网络连接器,是为了隔离,以免计算机RS-232 口损坏。通过网络连接器出来地线以及RS-485 信号通过比较高低电平与从站进行通讯。同时通过PC/PPI 电缆的连接口引出针口通过RS-485 和RS-232 转换成3 条线分别为接收、发送和地线,与计算机进行通讯。
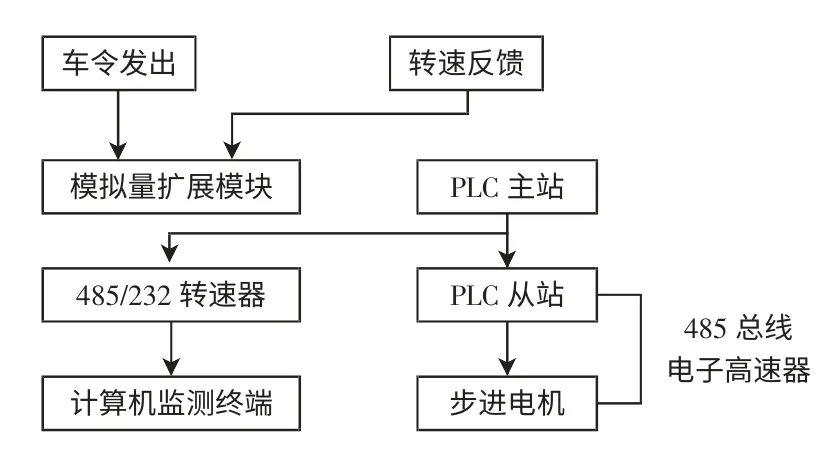
图1 PLC 自动化遥控系统总体结构
起停控制主要包括起动控制、慢转控制、停车控制、重复起动控制。以正车起动为例,系统针对2 种情况:停车情况下的起动和正常反向起动,都能确保正车起动电磁阀的通断,同时还须判断重复起动的状态。慢转控制所要考虑的情况分别是主机停车时间超过30 min 和电源断电后恢复供电2 种情况。在主机转过一圈或有紧急操纵信号的情况下,可以撤消慢转控制。停车控制所要考虑的情况共分4 种:停车指令、故障停车信号、车令与运转方向不一致以及起动电磁阀工作期间。重复起动控制又分为4 个子程序:起动时间监视子程序、换向时间监视子程序、起动间歇延时子程序和重复起动次数计数子程序。
转速控制是用模拟量输入模块EM235 来读取车钟指令和转速反馈。PLC 主站首先读入模拟量,通过3 次移位,可以得到12 位的数字信号,然后通过定时中断程序对输入量进行数字滤波,滤波后的数据将与由外电路所确定的正常信号电压范围比较,可判断车令电位器的3 个接线端有无断线故障,在确保信号的正常之后,再经过各种限制处理,限制环节主要包括临界转速限制、加速度限制和负荷程序限制,限制处理后的结果最后通过PPI 通信协议发送给从站PLC 电子调速器进而控制主机的转速。转速限制处理程序流程图2 所示。
3 结 语

图2 转速限制处理程序流程图
本文结合大连渔轮公司75 m 远洋金枪鱼围网船舶主机遥控系统设计,提出一种硬件电路相对简单且易于实现、线路少、编程容易且功能较全面的主机遥控系统设计模式。从中可以看出,PLC 有很高的可靠性,能适用于恶劣的工作环境,在主机遥控中PLC 具有显著的技术优点,可取代各类由继电器组成的主机遥控装置,特别适用老船设备的更新改造,符合我国国情;PLC 还具有PD 调节功能,可以更好地进行主机转速调节,其数据通讯接口便于和上级计算机联网,组成船舶综合自动化系统。综上所述,基于PLC 的主机遥控系统有较好的应用价值和发展前景。
