汽车稳定性控制系统模型及横摆控制仿真
2013-12-14周鑫华邓国红
欧 健,周鑫华,张 勇,邓国红
(重庆理工大学 重庆汽车学院,重庆 400054)
汽车电子稳定控制(electronic stability control,ESC)是一种先进的主动安全系统,它可以避免汽车在各种路面附着条件下高速行驶时由于紧急转向或制动而发生的侧滑和侧翻等危险情况,极大提高了汽车行驶的安全性和操纵稳定性。国外近几年推出的新型汽车ESC系统包含了对汽车的侧翻控制。福特汽车公司 Jianbo Lu等[2]采用 ESC标准传感器信息估计汽车侧倾状态,通过侧倾反馈的控制方法对前外轮制动,增强了ESC系统的侧翻控制功能。博世公司在ESC系统的基础上描述了侧翻缓解功能[3]。本文简化了车辆模型,结合汽车动力学稳定性控制要求,建立了可实时计算的整车动力学仿真模型,通过对鱼钩试验的仿真分析,验证了ESC系统直接横摆控制(direct yaw control,DYC)对汽车横摆运动、侧倾运动的控制效果。
1 车辆动力学模型建立
1.1 八自由度整车模型
建立包括纵向运动、侧向运动、横摆运动、侧倾运动和4个车轮回转运动的八自由度整车模型。其中侧倾运动分为2种状态(如图1(b)所示):一种是在内侧车轮被举离地面之前,由于惯性力作用引起的悬架侧倾运动;另一种是在惯性力到达极限之后,悬架侧倾运动达到饱和状态,使内侧车轮被举离地面的侧翻运动。
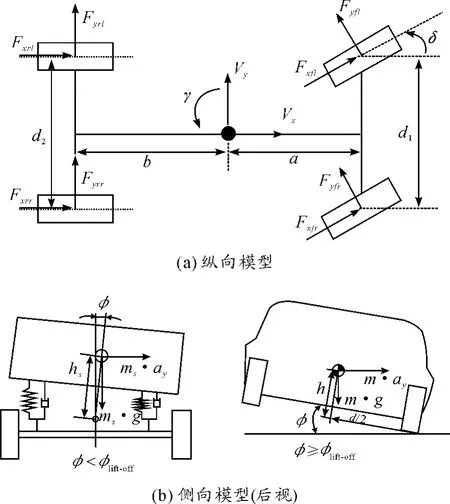
图1 八自由度整车模型
忽略沿z轴的垂直运动和绕y轴的俯仰运动,在保证满足研究汽车横摆、侧倾运动的情况下,做如下假设:①汽车质心与汽车动坐标系原点重合;②各轮胎机械特性相同;③悬架弹簧和阻尼均为线性,且二者平行;④ 直接以前轮转角为输入,且两前轮转角相等;⑤忽略空气阻力和滚动阻力的影响。八自由度整车模型如图1所示。
1)纵向运动方程:

2)侧向运动方程:

3)横摆运动方程:

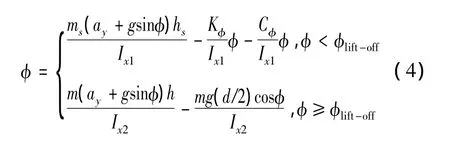
4)侧倾(侧翻)运动方程:
5)车轮的转动方程:

6)车轮垂直载荷:
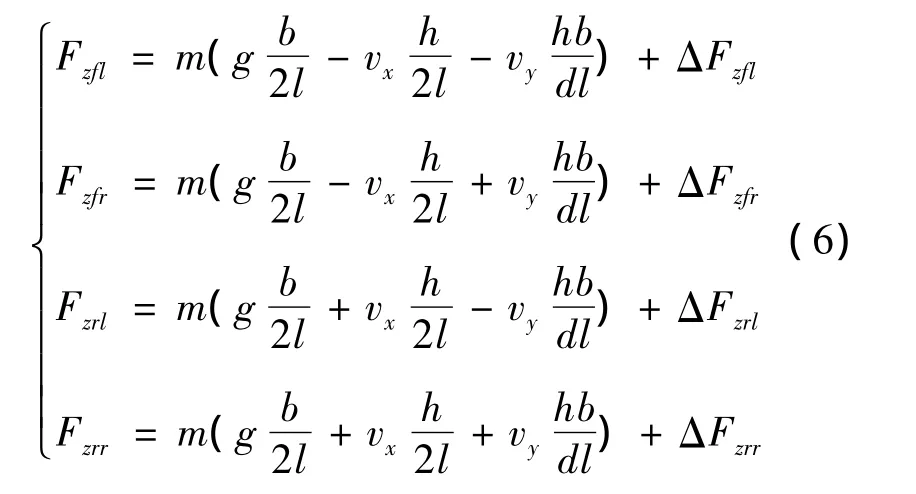
式中:m为整车质量;ms为簧载质量;vx为纵向速度;vy为侧向速度;γ 为横摆角速度;Fxij、Fyij、Fzij分别为各车轮的纵向力、侧向力和垂向力;δ为前轮转角;Iz为横摆转动惯量;φ为侧倾角度;Kφ、Cφ为侧倾刚度和侧倾阻尼;d为汽车的轮距;Ix1、Ix2分别为内侧车轮被举离地面前后的侧倾转动惯量;a、b分别为质心到前、后轴的距离;hs为侧倾中心高度;h为汽车质心高度;Tbi为各轮上的制动力矩;ΔFzij为汽车侧倾引起的各车轮垂直载荷变动量,这个变动量在外侧车轮是增加的垂直反力,在内侧车轮是减少的垂直反力。
1.2 轮胎模型和汽车参考模型
采用“魔术公式”轮胎模型,输入为轮胎垂向载荷、侧偏角和滑移率,输出为轮胎的纵向力、侧向力和回正力矩,表达式为[4]

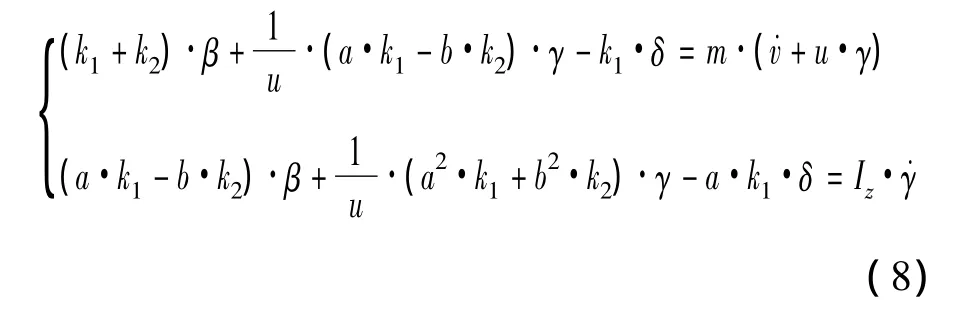
参考模型用线性二自由度汽车模型,其运动微分方程为[5]
因为汽车侧向加速度受路面附着条件限制,即

否则会发生侧滑,又因为ay≈γ·u,因此汽车名义横摆角速度最大值可表示为

在不同的路面附着条件和行驶车速下,名义横摆角速度取较小值:

式中:k1、k2分别表示前后轮总侧偏刚度;μ表示路面附着系数;u表示车速;sign表示符号运算。
2 控制策略制定
汽车ESC系统直接横摆控制(DYC)采用差动制动的策略对前外轮和后内轮进行制动干预,通过改变轮胎纵向力、侧向力的分布产生修正横摆力矩来抑制汽车的不足或过多转向,实现汽车的稳定性控制。本文以横摆角速度为控制变量,基于模糊控制理论[6-7],以汽车实际横摆角速度与名义横摆角速度的误差E以及误差变化率EC为输入,修正横摆力矩M为输出,设计横摆角速度反馈模糊控制器[8-10]。模糊逻辑规则如表1所示,其中 PB、PS、Z、NS、NB 为模糊语言变量,分别表示正大、正小、零、负小、负大。
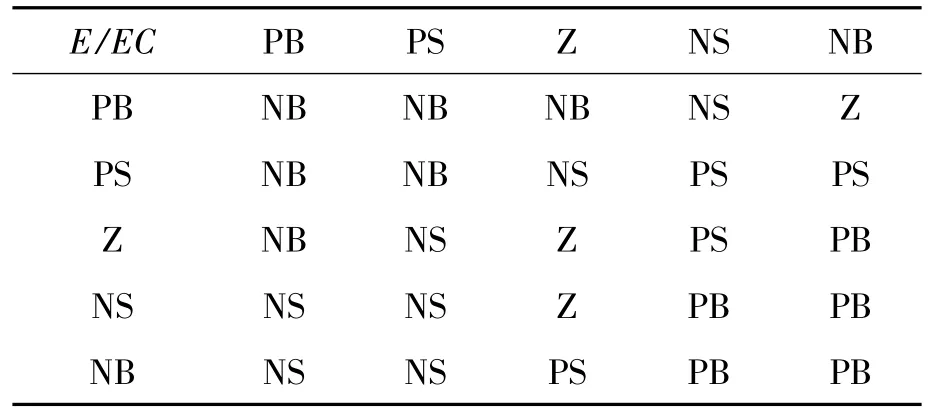
表1 模糊逻辑规则
模糊控制计算的修正横摆力矩通过一个增益系数k转换为制动力,采用Matlab/Stateflow将制动力施加在所要制动的车轮上,由前轮转角δ(左转为正)和横摆角速度差值Δγ=γ-γNO判断出所要控制的车轮。控制车轮选取规则如表2所示。
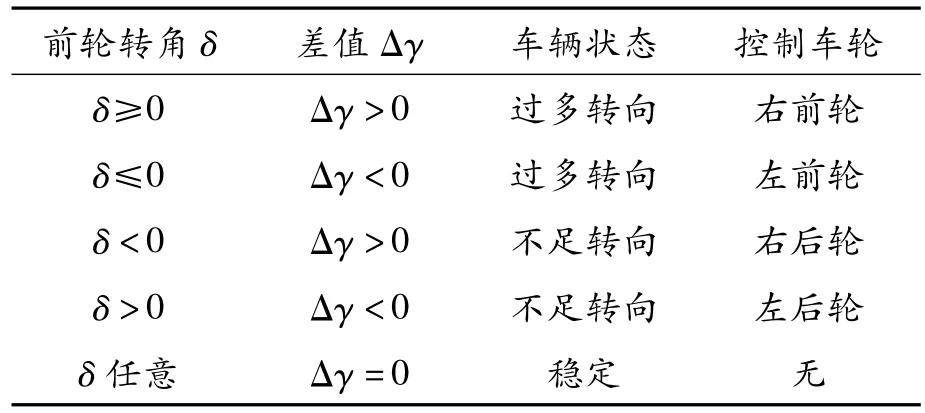
表2 控制车轮选取规则
在Matlab/Simulink环境下,分别对八自由度整车模型、汽车参考模型、模糊控制器和车轮选择逻辑进行建模。忽略转向系统,直接以前轮转角为输入,得到汽车稳定性控制系统的控制策略框图,如图2所示。
3 仿真结果及分析
以某款乘用车为例,采用美国公路交通安全管理局(NHTSA)提出的车辆侧翻危险工况——鱼钩试验进行仿真分析。仿真模型的主要参数如表3所示,轮胎型号为215/55 R17。

图2 汽车稳定性控制系统的控制策略框图
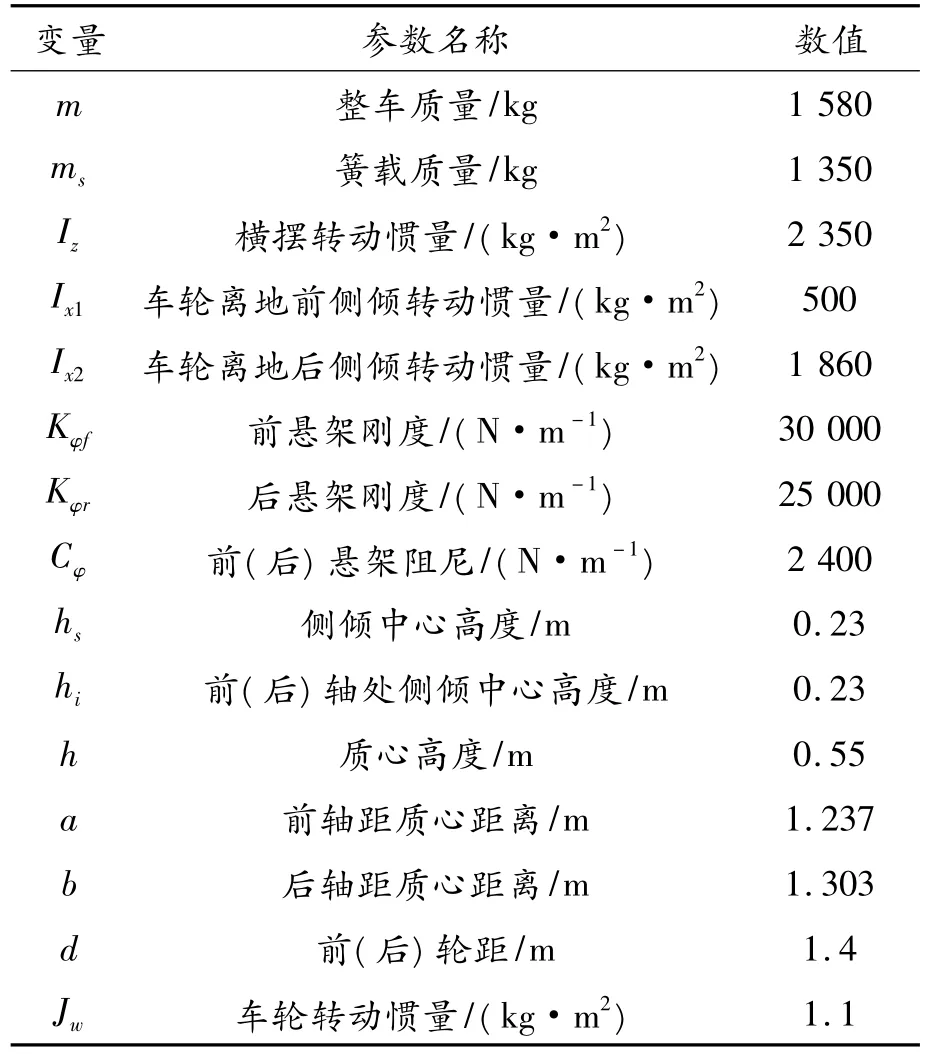
表3 仿真模型的主要参数
模型仿真工况:汽车初始车速为100 km/h,前轮进行转向幅值为3°的鱼钩转向试验,转向输入如图3所示。
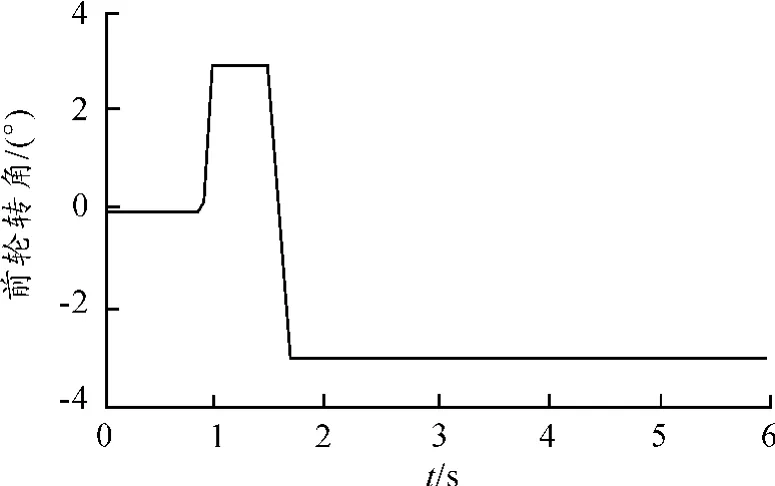
图3 转向输入
针对这种侧翻危险工况,选用2种不同的汽车模型:无控制模型和DYC模型。汽车驱动路面模拟干燥沥青路面(μ=0.8)。
假设汽车的侧倾运动仅为悬架的侧倾运动,汽车没有发生侧翻运动,各车轮垂直反力如图4所示。此时轮胎最大垂直反力达到7.7 kN,最小垂直反力降到0.4 kN,最大载荷转移率约为90%,汽车侧翻倾向性很大。此路面条件下汽车侧翻阈值大于侧滑阈值,汽车在极限工况下会先发生侧翻,而仿真工况为汽车未侧滑的极限工况,没有控制的汽车会由悬架的侧倾运动转变为车轮被举离地面的侧翻运动。仿真模型中作如下设置:当横向载荷转移率LTR达到0.85(侧翻阈值)时,汽车开始发生侧翻,no ERC表示没有紧急侧倾控制。
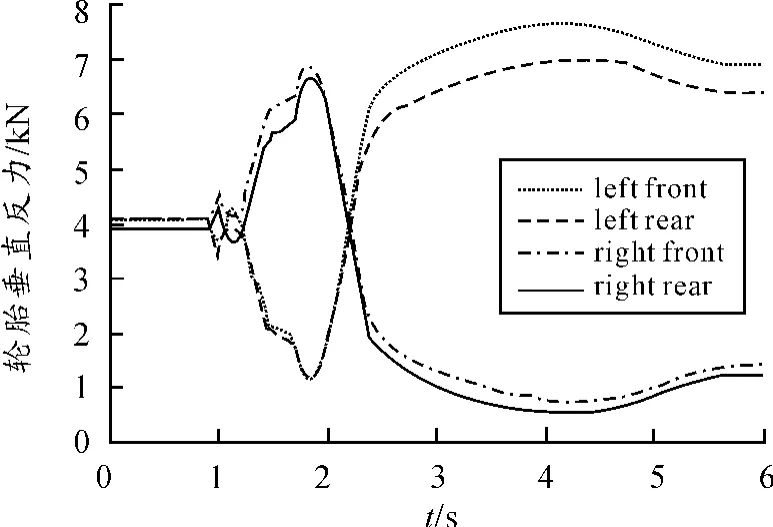
图4 各轮胎垂直反力
仿真中忽略了从悬架侧倾极限位置到内侧车轮刚被举离地面的过程。因为制动力控制主要受车轮垂向载荷影响,当车轮即将离开地面时就很难起到有效作用,这个过程可在制动联合主动/半主动悬架控制中进一步讨论。
图5表明,DYC能很好地控制汽车横摆角速度稳定性。图6表明,DYC使汽车侧向加速度得到了一定程度的减小。图7和图8表明,DYC减小了汽车侧倾角度和侧倾角速度,并防止了汽车侧翻,而没有控制的汽车在紧急持续转向下发生了侧翻。仿真工况中由于直接横摆控制减小了汽车的侧向加速度,使载荷转移率得到减小,汽车抗侧翻能力得到提高;而没有控制的汽车在第2次转向后,侧向加速度进一步增加,汽车进入侧翻倾向的危险状态,当悬架侧倾运动饱和后,在持续转向的情况下汽车内侧车轮将会被举离地面,开始发生侧翻。

图5 汽车横摆角速度

图6 汽车侧向加速度

图7 汽车侧倾角度

图8 汽车侧倾角速度
4 结束语
本文建立了八自由度整车模型和参考模型,采用了基于模糊控制理论的直接横摆控制策略,并在鱼钩试验工况下对汽车的横摆运动、侧倾运动进行仿真分析。仿真结果表明,汽车ESC系统直接横摆控制策略可以有效实现汽车的横摆稳定性控制,并且减小了汽车侧向加速度和侧倾角度,增强了汽车抗侧翻能力。仿真结果验证了模型的正确性和控制策略的有效性。
[1]疏祥林,李以农.基于横摆角速度的汽车ESP系统模糊反馈控制方法[J].汽车技术,2006(3):16-19.
[2]Lu J,Messih D,Salib A.An Enhancement to an Electronic Stability Control System to Include a Rollover Control Function[J].SAE,2007(1):809-813.
[3]Liebemann E K,Meder K,Schuh J,et al.Safety and Performance Enhancement:the Bosch Electronic Stability Control(ESP)[J].SAE,2004(21):60-65.
[4]Pacejka H B,BESSELINK I J M.Magic formula tire model with transient properties[J].Vehicle System Dynamics,1997,27:234-249.
[5]余志生.汽车理论[M].3版.北京:机械工业出版社,2007:116-118.
[6]夏玮,李朝晖,常春藤,等.MATLAB控制系统仿真与实例详解[M].北京:人民邮电出版社,2008:361-367.
[7]叶建华,朱春华,詹友基,等.车辆静态稳定性试验系统的设计[J].重庆理工大学学报:自然科学版,2009,23(3):16-20.
[8]欧健,王林峰,房占朋.汽车电子稳定程序模糊控制仿真[J].计算机仿真,2010,27(7):288-291.
[9]欧健,石智卫.汽车ESP系统的建模及仿真分析[J].重庆理工大学学报:自然科学版,2012,26(5):6-11.
[10]谢敏松,李以农,郑玲,等.基于模糊控制的汽车ESP系统综合反馈控制[J].重庆大学学报:自然科学版,2007,30(4):57-59.