静态傅里叶变换超光谱全偏振成像技术*
2013-12-12李杰朱京平齐春郑传林高博张云尧侯洵
李杰 朱京平 齐春 郑传林 高博 张云尧 侯洵
1)(西安交通大学电信学院,陕西省信息光子技术重点实验室,电子物理与器件教育部重点实验室,西安 710049)
2)(西安交通大学电信学院信息与通信工程系,西安 710049)
(2012年7月5日收到;2012年8月22日收到修改稿)
1 引言
成像光谱技术和偏振成像技术是空间成像技术与光谱分析及偏振测量技术的有机结合,是近年发展起来的新型光学遥感探测技术,是当今光学遥感技术发展的前沿,相对于其他遥感探测手段(可见光、红外、雷达等),这两种技术都有其独特的优点.
成像光谱技术获取目标的二维空间信息和一维光谱信息[1].地表、海洋和天空中的任何物体在反射、透射和辐射光波的过程中都会表现出不同的光谱特性,对这些特征光谱进行分析,可识别出目标的种类、材质及物质组成.
偏振成像技术获取目标的二维空间信息和偏振信息[2,3].偏振信息独立于光强度和光谱信息,它能反映目标形貌取向、表面粗糙度、致密度、电导率、含水量等材料理化特征,不同的物体由于其表面特征不同,偏振度会有很大的差异.通过这些差异可增强图像的对比度,也能用于物质的分类与识别.
这两种技术都有着非常广阔的应用前景.例如,气象预报、环境灾害监测、资源调查、星空探索等.因此,世界各国投入了大量的人力、物力,纷纷开展相关理论与器件研究,取得了一系列成果,并有部分仪器发射升空.我国的风云三号卫星、神舟三号飞船、环境一号A卫星、嫦娥一号探月卫星都搭载有成像光谱或偏振成像设备,在我国空间光学遥感领域发挥了不可替代的作用.
近年来,这两种技术又出现了交叉融合的趋势,推动着光学遥感技术朝着多维度、多信息融合的方向发展.大量理论及实践表明,多种光学遥感技术相结合,必将大大增强光学遥感设备地物识别能力,扩展仪器使用范围,提高仪器工作效率.如果说空间成像、光谱探测、偏振探测融合产生成像光谱和偏振成像技术是空间光学遥感技术的一次飞跃,那么成像光谱与偏振成像技术的融合则是一次新的飞跃,这方面的研究已引起欧美等先进发达国家的重视,成为空间光学遥感技术研究与发展的最前沿.
遗憾的是,受基础原理限制,现有光谱偏振成像方法普遍需要旋转、电控调制位相延迟器、偏振片,或采用微型偏光元件阵列,结构复杂,制作工艺与装配难度大,抗振能力及环境适应性差,很难满足航空航天遥感及野外探测的需要,已成为制约该技术发展与应用的主要障碍[2].因此,必须从探测机理上进行深入研究,提出新的探测方法,才能从根本上解决这一问题.为此,本文作者于2010年首次在国际上提出了基于全光调制的静态傅里叶变换超光谱全偏振成像新方法,无需运动、电控调制部件,可实现目标图像、光谱及全偏振信息的一体化探测[4,5],受到了国际同行的高度评价[6].
本文在原有研究基础上,给出了静态傅里叶变换超光谱全偏振成像具体实现方案,讨论分析了新方案的技术原理,进行了计算机模拟验证,并利用研制成功的原理样机进行了外场推扫实验.模拟及实验结果表明新方法可有效解决成像光谱与偏振成像技术融合存在的一系列问题,为光谱、偏振、图像三位一体探测提供新的技术途径;有效提高了仪器探测效率,为具有高光谱、高灵敏度、高稳定度、实时探测等优点的新型空间光学遥感器开发提供基础理论与技术支持;极大地扩展空间光学遥感设备工作范围,为地球资源普查(矿产、森林植被、海洋鱼类与海藻),环境灾害预报与监测(森林草场火灾、水涝灾害、土地盐碱化与沙化等),大气气溶胶、冰晶云、卷云的探测,大气与水体污染监测,大气微量成分分析(温室气体、臭氧等),大气垂直温度与风场、压力场探测,深空探测与天体物理研究等领域提供了新的信息获取手段.
2 系统基本结构及探测原理
本论文提出的静态傅里叶变换超光谱全偏振成像仪结构如图1所示[4],主要由前置望远系统,位相延迟器R1,R2,起偏器P,Wollaston棱镜WP,检偏器A,二次成像系统及焦平面探测器阵列FPA组成.目标光经前置望远系统收集、准直之后,进入由R1,R2组成的位相调制模块进行位相调制.调制后的光通过P变为线偏振光,接着又被WP分解为两束振幅相等、振动方向互相垂直、传播方向成一定夹角的线偏振光.两束线偏振光通过A后,振动方向变为一致,最后被二次成像系统L汇聚到FPA上成像,并产生干涉.

图1 静态傅里叶变换超光谱全偏振成像仪结构示意图
利用穆勒矩阵,可以很方便地研究静态傅里叶变换超光谱全偏振成像仪实现目标光谱、偏振探测的原理,其获得的干涉条纹强度为

其中σ1,σ2为入射光的波数范围,z为双折射干涉仪引入的光程差,Si(σ)为入射光的Stokes矢量,M=MAMWPMPMR2MR1为仪器各偏光元件偏振响应的穆勒矩阵.
将各元件穆勒矩阵的值代入(1)式可以得到


式 中 ϕz(σ)=2π∆zσ, ϕ1(σ)=2π(no(σ) −ne(σ))d1σ,ϕ2(σ)=2π(no(σ)− ne(σ))d2σ, ∆z 是光束通过WP棱镜产生的光程差,no(σ)−ne(σ)为双折射晶体的双折射率之差,d1,d2分别是R1和R2的厚度.可见,由于位相调制模块的作用,入射光的四个Stokes参数被调制上了不同的位相因子.对(2)式积分可得:


式中L1,L2为位相延迟器R1,R2在中心波段引入的光程差.从(3)式可以看出干涉条纹I(z)被分成了七个通道(C0,C1,C∗1,C2,C∗2,C3,C∗3),其中心分别位于z=0,±(L1−L2),±L2和 ±(L1+L2).对其进行傅里叶逆变换便可得到入射光的全部四个波长相关Stokes参数:

从物理意义上讲,静态傅里叶变换超光谱全偏振成像仪实现全偏振探测的机理是:通过特定的位相延迟器将不同的位相因子分别调制到入射光的四个Stokes参数上,再利用双光束干涉数学上的傅里叶变换性质将不同的Stokes参数在光程差域上分开,最后对不同光程差位置上的Sokes参数进行解调,便实现了光谱及全部偏振信息的探测.其中的S0(σ)表示入射光总强度的波数分布关系,就是平常所说的光谱信息.
3 计算机模拟实现
为验证探测原理的有效性,利用计算机对系统进行了模拟.图2为模拟输入的入射光波长相关Stokes矢量,波数范围为25000—10000 cm−1(400—1000 nm).计算得到静态傅里叶变换超光谱全偏振成像仪的干涉强度分布如图3所示.可以清楚地看到干涉图分成了七个独立的通道.对其进行逆傅里叶变换解调,得到的波长相关Stokes矢量如图4所示,可见其良好地再现了输入目标光谱.
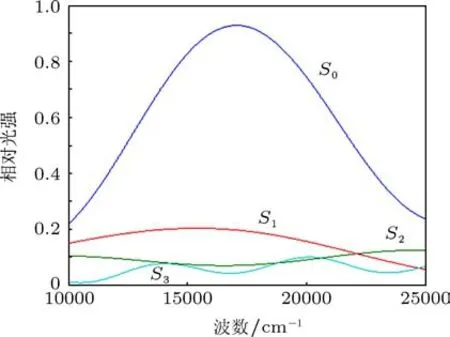
图2 模拟输入的波长相关Stokes矢量

图3 静态傅里叶变换超光谱全偏振成像仪干涉强度分布模拟计算结果
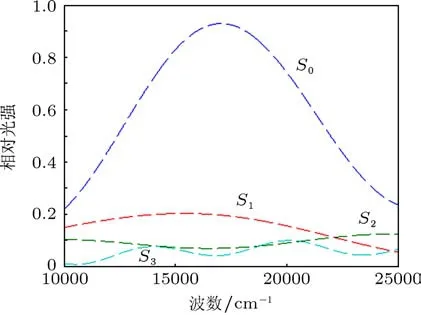
图4 模拟解调出的四个波长相关Stokes参数

图5 静态傅里叶变换超光谱全偏振成像原理验证样机
4 实验验证
为了验证静态傅里叶变换超光谱全偏振成像仪探测原理的有效性及系统设计方案的可实施性,本课题组研制了静态傅里叶变换超光谱全偏振成像仪原理验证装置(Φ80 mm×260 mm)如图5所示,进行了复色无偏光与线偏振光的测量实验.验证装置采用1280×1024 CMOS相机为接收器,系统工作波段为450—900 nm,光谱分辨率约为105 cm−1(633 nm时为4.3 nm),达到了超光谱分辨能力的要求.图6为实验室构造的复色线偏振光成像验证实验示意图.线偏振光则由卤钨灯照射可旋转的线偏振片P产生.
图7为实验获取的复色线偏振光干涉图,图8为解调得到的钨灯光谱及代表入射光全偏振状态的波长相关Stokes矢量,其中虚线代表理论数据,实线代表实验解调得到的数据.从图8中可以发现实验与理论数据符合较好,在绝大部分波段范围内准确度优于5%.

图6 复色线偏振光成像实验

图7 复色线偏振光(60°)成像干涉图
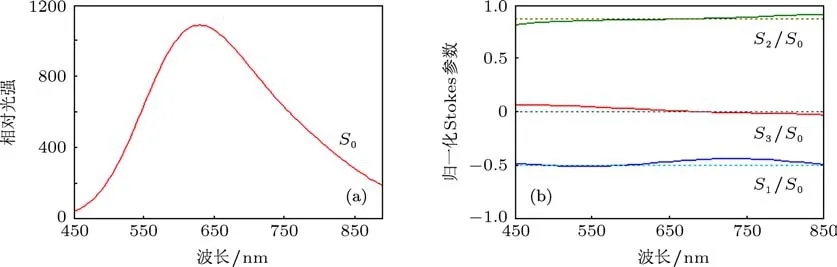
图8 干涉图解调复原得到的入射光光谱与偏振谱信息(虚线,理论值;实线,实验值)

图9 静态傅里叶变换超光谱全偏振成像仪外场推扫实验获取的图像效果与彩色数码相机拍摄的真实场景的对比 (a)光谱图像“数据立方体”;(b)全色450—900 nm全偏振度图像;(c)彩色数码相机照片
图9 为外场推扫实验获取的成像光谱“数据立方体”和代表全偏振信息的全色(450—900 nm)全偏振度图像.
对比图9(a)—(c)可见,静态傅里叶变换超光谱全偏振成像仪外场推扫实验获得了非常好的效果.图9(a)利用光谱数据合成的真彩色强度图像真实再现了实验场景;阴影中的黑色汽车在强度图像中较暗,但在图9(b)全偏振图像中,由于其表面光滑,且为金属材料,具有较高的偏振度,因此较为明亮,也表明了偏振信息独立于强度、光谱信息这一特征.另外需要指出的是,由于静态傅里叶变换超光谱全偏振成像仪采用的是推扫式成像方式,且实验选用的CCD帧频很低,当运动目标(如图9中的骑自行车的行人)沿垂直于推扫方向的运动较快时会出现失真.通过增加CCD帧频,提高推扫速度可以解决这一问题.
5 结论
本文阐述了新型静态傅里叶变换超光谱全偏振成像探测的基本原理,给出了新方法的具体实现结构,并从各结构元件的穆勒矩阵出发,推导出了新方案的调制干涉强度数据表达式及Stokes矢量解调公式,分析了新方法实现光谱、全偏振探测的物理过程.对新方案进行了计算机数值模拟验证,研制了原理验证样机,开展了室内、室外验证实验.模拟及实验结果均表明新方案原理正确,技术可行,同时具有无运动部件、电控调制部件,无复杂的微型偏光元件阵列,光通量大,信噪比高,结构简单紧凑,重量轻、体积小,环境适应性好等诸多优点.
[1]Tong Q X,Zhang B,Zheng L F 2006 Hyperspectral Remote Sensing(Beijing:Higher Education Press)(in Chinese)[童庆禧,张兵,郑兰芬2006高光谱遥感(北京:高等教育出版社)]
[2]Tyo J S,Goldstein D L,Chenault D B,Shaw J A 2006 Appl.Opt.45 5453
[3]Hyde M W,Schmidt J D,Havrilla M J,Cain S C 2010 Opt.Lett.35 3601
[4]Li J,Zhu JP,Wu H Y 2010 Opt.Lett.35 3784
[5]Li J,Zhu J P 2010 China Patent ZL201010127388.3[2010-3-18][李杰,朱京平2010 ZL201010127388.3中国专利2010-3-18]
[6]Craven J 2011 Ph.D.Dissertation(U.S.:the University of Arizona)
