三维激光扫描技术在构筑物模型重建中的应用
2013-12-09李孝雁张世恩
张 键,李孝雁,韩 剑,张世恩
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作 454003;2.黄河水利职业技术学院 测绘工程系,河南 开封 475001;3.南阳高新区大地测绘有限公司,河南 南阳 473000)
0 引言
三维激光扫描技术是最近几年得到迅速发展的一种高新测量技术。 与传统单点测量方法不同,地面三维激光扫描是从水平到垂直的全自动、高精度、进步式扫描测量[1]。 这种技术不用接触物体,就能连续、快速地获取物体表面的点云信息,并将所扫描到的空间信息快速转换成计算机可以处理的数据。 它拥有数据获取速度快,数据信息丰富,信息传输、加工、表达容易等特点[2]。 基于以上特性,三维激光扫描技术在变形监测、管线测量、文物保护等领域显示出独特、无法取代的优越性[3],被称为继GPS 技术以来测绘领域又一次重大技术革命。 本文试以构筑物石狮像为例,对三维激光扫描技术的数据采集、数据处理和三维建模具体实施过程进行探讨。
1 三维激光扫描数据获取及处理工作流程
重建某一物体的数字模型,需要经过一系列技术流程:即拟定作业计划、获取点云数据和处理点云数据3 部分。 在具体实施之前,应制订详细的作业计划,即根据扫描对象的特点和精度要求,设计合适的作业路线和测站数、确定合理的扫描距离和采样密度等。点云数据获取阶段主要包括采集点云数据、初步验证点云数据的准确性等。 点云数据处理阶段主要是点云数据的预处理、格网构建、三维重建等[4-5]。 工作流程如图1 所示。
2 石狮像三维空间模型构建
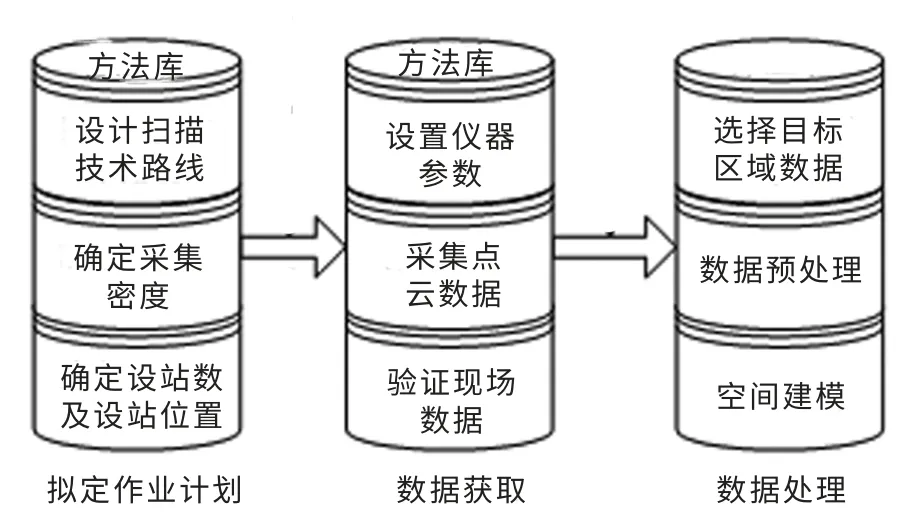
图1 地面激光扫描测量系统工作流程Fig.1 Working process of terrestrial laser scanning system
本次构筑物石狮像采用Lecia ScanStation2 三维激光扫描仪和配套软件Cyclone6.0 进行数据采集和预处理,并利用逆向工程软件Geomagic Studio 11将三维扫描数据转换成数字模型。
2.1 数据的采集
三维激光扫描仪每次扫描只能获取目标物的局部数据。 为全面获取石狮像表面的三维坐标,围绕石狮像一周设置三站进行数据采集,每站均采用1~2 mm 的采样密度。 由于分站扫描,在构筑物附近适当的位置放置人工标靶,便于数据配准,提高点云数据配准精度。 在数据采集过程中,三维激光扫描仪配合Cyclone6.0 软件,实时观察、检验数据的完整性。
2.2 数据预处理
数据预处理阶段主要包括点云配准、剔除噪声点和重采样3 个阶段。 经过预处理后的点云数据将直接用于构筑物的三维重建。 因此,数据预处理质量的高低将直接影响到后期的建模精度[6]。
2.2.1 点云配准
地面三维激光扫描仪每站扫描都是仪器自定义的坐标系,即每站坐标系都是相互独立的。 为得到扫描对象完整的点云数据,必须将每次扫描结果转换在统一坐标系下, 这个过程即是点云数据的配准过程。
点云配准实质上是两个空间直角坐标系之间的转换[6],即在两个不同测站N1和N2数据中,找出3 个或3 个以上的特征点, 以其中一站坐标系为基准,将另外一站的数据通过坐标转换模型转换到基准坐标系下。 转换模型公式为:
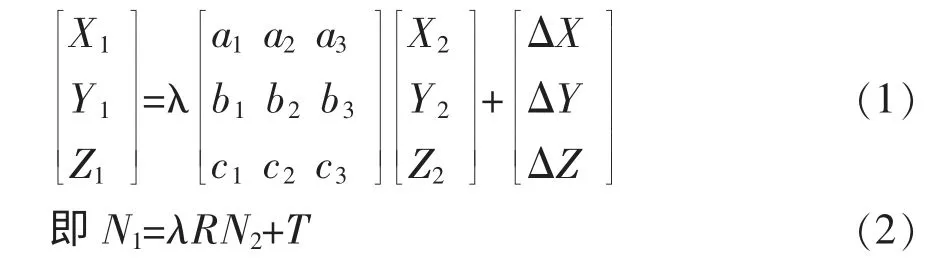
式中:λ 为比例系数;R 为关于旋转变量(Ф、ω、θ)的旋转矩阵;T 为平移矩阵,表示坐标原点的平移量[7]。
解算R、T 的过程,就是解算6 个待定参数Δx、Δy、Δz、Ф、ω、θ 的过程。 常用的配准方法有3 种:基于标靶的配准、基于目标物特征点的配准、基于标靶和特征点的混合配准。 上述3 种方法中,基于标靶的配准精度较高。 该方法以某一扫描站的坐标系为基准,将其他各站的坐标系统都转换到该站的坐标系统下,不同测站之间需要至少3 对以上的同名标靶来完成数据配准。 本次配准也采用这种方法。拼接前后对比图如图2 所示, 拼接后点云误差为0.001m,误差向量为(0.001,-0.001,0.000)m。
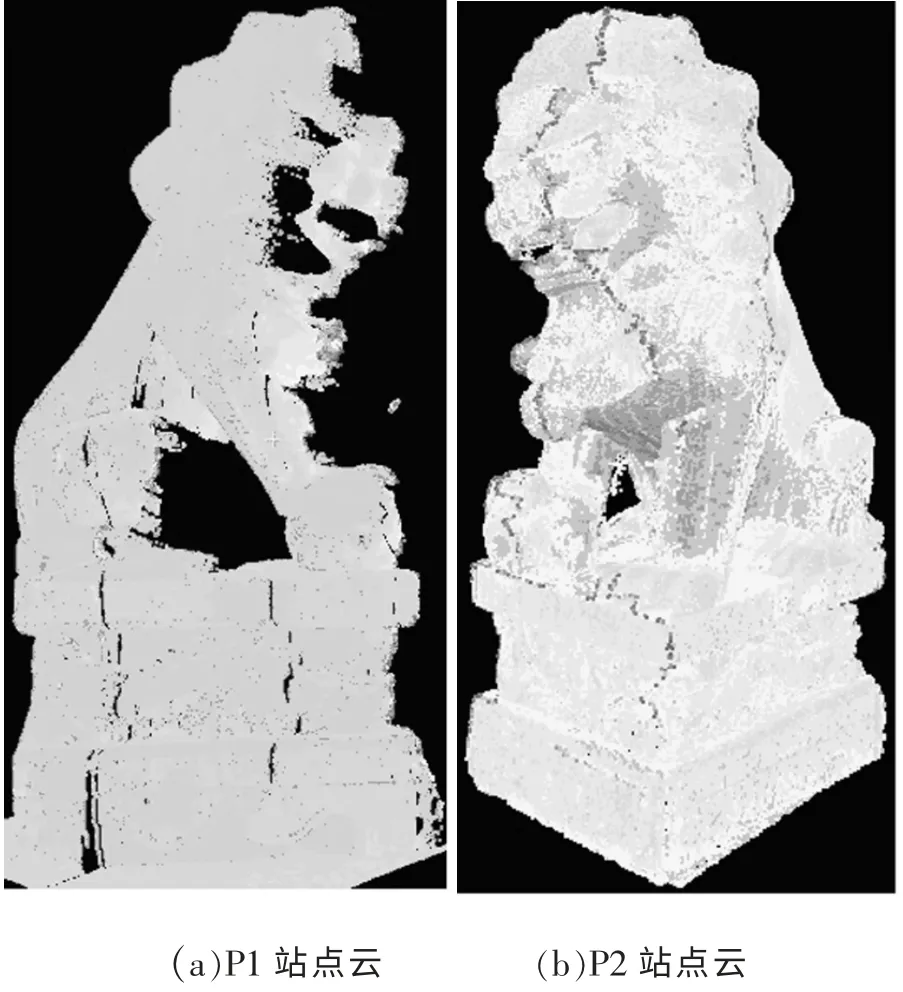
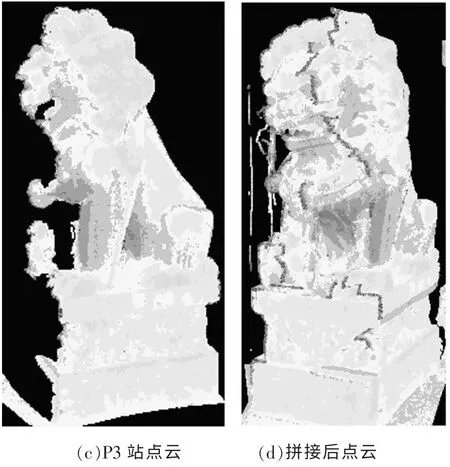
图2 不同测站点云拼接前后对比图Fig.2 Comparison of before and after cloud registration at different test sites
2.2.2 剔除噪声点
在三维激光扫描仪获取数据的过程中,由于仪器误差、外界因素(如激光雷达旋转引起的抖动、运动物体干扰、激光发散等)的影响,采集的点云数据中可能包含一些不属于目标物的数据,这些数据被称为噪声点。 因此,对于拼接完成后的点云数据,需要进行去除噪声点处理。 对比较明显的噪声数据(如孤立点或突起点), 可采用手工删除的方法剔除。本次数据处理是在Cyclone 6.0 软件上进行手工剔除的。
2.2.3 点云数据重采样
三维激光扫描仪所获取的点云数据量很庞大。若不对其进行筛选,将直接影响到数据处理的速度和效率,不利于后续的模型重建过程。 这是由于相邻两站在扫描过程中会有一定的重叠区域,在数据配准时会造成数据重叠和数据冗余。 并且,观测站附近数据点非常密集,远远超出实际的需求。 因此,有必要在不影响数据精度的情况下,对点云数据设置某一阈值进行重采样。 本次点云数据重采样是在Cyclone6.0 软件上进行的,需要设置重采样密度,通过软件自动完成。 对数据进行预处理后的点云数据如图3 所示。
2.3 石狮空间建模
三维激光扫描仪得到的点云模型是由空间离散点构成的,这些点并不能真实地表现构筑物的实体表面,需要通过一些特殊算法恢复构筑物表面的拓扑关系。 构建三角网就是一种简单实用的方法。在三维激光扫描仪获取数据的过程中,由于障碍物遮挡,会导致采集的数据不完整,形成数据空洞。 在构网时,这些空洞无法得到完整表达,需要根据构筑物特点进行空洞填补,最终得到完整的网络模型[8]。笔者在Geomagic Studio11 中对三角网模型进行了多项细节操作,效果图如图4 所示。
完成构筑物的网格模型品构建后,还要对构筑物进行纹理信息恢复,即纹理重建。 纹理重建的主要目的是建立网格模型与影像之间的纹理映射[9]。结合数码相机采集到的纹理信息,在软件中采用人机交互的方式进行纹理映射,最终完成石狮像的三维建模,其最终效果图如图5 所示。

图3 预处理后点云数据Fig.3 Point cloud data after pretreatment
3 结语
三维激光扫描技术作为一种全新的技术手段,获取的数据更加完善和精确,而非接触式测量更加适用于表面不规则的构筑物[10]。 与传统的测绘方法相比, 三维激光扫描技术具有高效的作业流程,能在较短的时间内获取上百万个点数据,操作简单,所需作业时间短,数据获取更全面、快捷、安全,可以完成一些常规手段无法完成的任务,尤其适合结构复杂、表面不规则的构筑物。

图5 三维重建效果图Fig.5 3D reconstruction effect
随着三维激光扫描技术的成熟和数据处理算法的不断完善,激光扫描技术在模型重建方面必将得到广泛的应用。
[1] 戴升山, 李田凤. 地面三维激光扫描技术的发展与应用前景[J]. 现代测绘,2009,32(4):11-11.
[2] Dinesh M, Ryosuke S. Auto-extraction of Urban Features from Vehicle -Borne Laser Data. Symposium On Geospatial Theory Processing and Applications,Ottawa,2002.
[3] 刘春, 杨伟. 三维激光扫描对构筑物的采集和空间建模[J]. 工程勘察,2006(4):49-50.
[4] 宋碧波,卢小平,卢遥. 基于点云数据的建筑物三维重建[J]. 测绘通报,2010(S0):228-229.
[5] 程效军, 金雯. 基于三维激光扫描仪的古建筑三维建模技术研究[D]. 上海:同济大学,2006.
[6] 卢小平,王玉鹏,卢遥,等. 齐云塔激光点云三维重建[J].测绘通报,2011(9):13-14.
[7] 张剑清,潘励,王树根. 摄影测量学[M]. 武汉:武汉大学出版社,2009:27-30.
[8] 丁延辉,邱冬炜,王凤利. 基于地面三维激光扫描数据的建筑物三维模型重建[J]. 测绘通报,2010(3):56-57.
[9] 王昌翰,向泽君,刘洁. 三维激光扫描技术在文物三维重建中的应用研究[J]. 城市勘测,2010,12(6): 69-70.
[10] 李海刚. HDS 技术在古建文物测量中的应用[J]. 测绘通报,2007(7):74-74.
