用于减少腰背痛发病率的可穿戴弯腰助力装置
2013-12-05罗自国余永葛运建
【作 者】罗自国,余永,葛运建
1 中国科学技术大学自动化系,合肥市,230027
2 中国科学院合肥智能机械研究所,合肥市,230031
3 日本鹿儿岛大学科学工程研究院,鹿儿岛,890-0065
0 引言
在农业、建筑、采矿等工作中,由于经济、工作环境等因素的限制,人们需长时间弯腰工作,从而导致了很高的腰背痛发病率。即使在美国,据美国劳工部2006年的职业展望手册,美国农业中需弯腰工作的农场工人达690000人[1]。全世界有高达13亿农业劳动力因弯腰工作而有患腰背痛的风险[2]。目前,在美国、加拿大、日本,已有人通过研究助力装置来减少或消除弯腰工作带来的危害。Satoshi Kawai等研发了一种用直流电机驱动的人体腰部助力装置,他们的第一代与第二代装置分别重11 kg[3]和6.5 kg[4],对于人体助力装置来说,他们的装置太重;Sato Y等开发了一种辅助腰部与膝关节的助力装置[5],他们的装置用一个额定电压为24 V的直流电机驱动,由于24 V的直流电源难以随身携带,从而限制了装置的使用。此外,还有HAL[6]、Muscle Suit[7]、BLEEX[8]都是带有电机驱动的助力装置,这些装置存在成本高、体积大的缺点,难以适应人们弯腰工作的需要。无电机驱动的弯腰助力装置有Bending Non-Demand Return(Limbic Systems Inc.,Ventura,CA)、happyback (ErgoAg,Aptos,CA)[9]、Bendezy (Bendezy-LiteTop,Mount Barker,Western Australia)以及Abdoli-E等研制的PLAD[10],无电机驱动的助力装置都仅用弹性元件实现被动助力。
本研究的目的是开发一种轻便型可随身穿戴的弯腰助力装置(wearable stoop-assist device,WSAD)。根据人体生物力学,考虑人体弯腰时的静力平衡,设计并开发用于减轻背部竖脊肌负担的WSAD,并利用角度传感器实现弯腰自动助力。肌电信号已被证实可用来测量肌肉的活动并预测其所受的力[11],因此通过肌电信号测量背部肌肉胸竖脊肌(thoracic erector spinae,TES)、腰竖脊肌(lumbar erector spinae,LES)、背阔肌(latissimus dorsi,LD)以及腹部肌肉腹直肌(rectus abdominis,RA)的活动,从而验证装置的有效性。
1 WSAD原理、设计与原型
1.1 WSAD的助力原理
由临床应用解剖学可知,当人体弯腰时,背部肌肉竖脊肌纤维逐渐伸长以控制弯腰运动[12]。竖脊肌如图1所示,竖脊肌分布于脊柱两侧,是控制弯腰最主要的肌肉,也是最容易拉伤的肌肉。
为了描述弯腰时竖脊肌所受的力,根据人体生物力学,建立人体弯腰时的理想受力模型,如图2所示,其中F1:头部和颈部的重力;F2:上臂、前臂和手的重力;F3:腰骶椎间盘以上躯干部分的重力;F4:由于腹内压力而形成的力;F5:竖脊肌所受的拉力;F6:第1骶椎上的反作用力;a:弯腰时躯干与竖直方向的夹角,即弯腰角度。
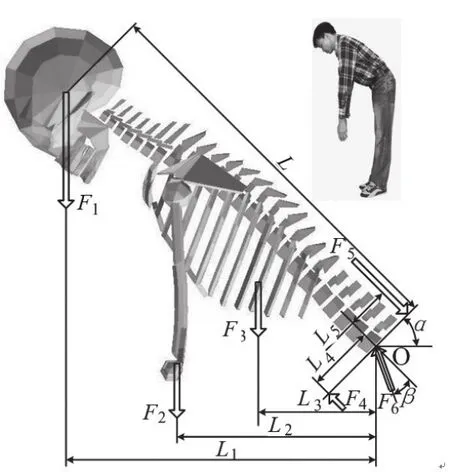
图2 人体弯腰时的受力分析Fig.2 Forces on lower lumbar part of spine in stooped posture
在大多数情况下,可以充分假设F4与F5是平行的[13]。由静力平衡可以求出竖脊肌所受的拉力:

根据成年人人体惯性参数(GB/T 17245-2004),假设人体的质量为M,则有F1=8.62%M,F2=4.32%M,F3=30%M。腹内压大约可协助承受10%~40%的腰椎前凸力矩[14],这里取F4=10%M。假设从头颈质心到腰骶椎间盘的距离为L,则有L1=Lsina,L2=0.71Lsina,L3=0.4Lsina,L4=0.16Lsina。代入式,则有:

由式(2)可知,当弯腰到45o或90o时,背部竖脊肌所受的力分别为1484 N、2098 N;若人体的质量M为70 kg时,这两个力分别为人体重量的2.2倍和3.1倍。若竖脊肌长时间处于这样大的拉力下,很容易引起腰背痛[15]。
受人的生理结构的限制,L5只有约5 cm,从而导致竖脊肌所受的拉力F5很大。若把式(1)变成式(3)。

如式(3)所示,为了减轻弯腰时竖脊肌所受的拉力F5,可以施加一个位于人体外部的拉力F7来减轻竖脊肌所受的拉力,这个外部拉力如图3中的F7所示。考虑静力平衡,则竖脊肌的拉力F5变为:

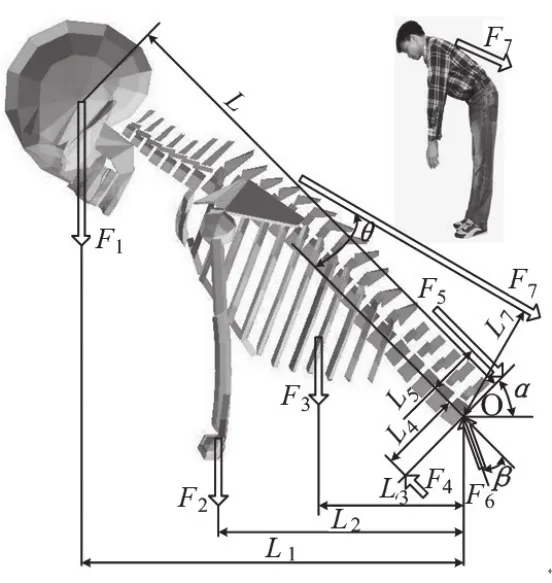
图3 加上助力F7之后的受力图Fig.3 Forces on lower lumbar part of spine in stooped postures,including of assist tension F7
比较式(1)和式(4)可知,加上助力F7之后竖脊肌的拉力会减少,设这个减少的力为助力F8,则有:

从式(5)可以看出,F7与L7越大,则助力F8越大,从而竖脊肌的拉力F5越小,即减轻了背部竖脊肌的负担。根据式(1)与式(4),可以求出对于竖脊肌的助力比ar。

已有研究表明,助力比并非越大越好,过大的助力比会导致肌肉肥大[16],可选择助力比为30%~50%,本文选择竖脊肌助力比为50%。F7由外部的拉力所决定,从而可以根据选择的助力比由式来设计助力臂L7。
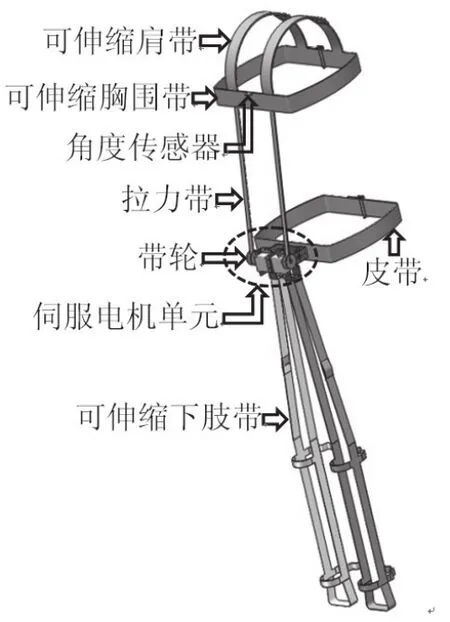
图4 WSAD的设计图Fig.4 Design of the WSAD
1.2 根据助力原理设计并制作WSAD
根据以上助力原理设计如图4所示的WSAD。在WSAD中有两根拉力带,它们的一端与胸围带相连,另一端分别与左右伺服电机上的带轮连接,这两根拉力带就相当于人体外部的竖脊肌,并行于脊柱的两侧,起到图3中F7的作用。角度传感器安装在胸围带上,用来检测人体弯腰时的角度。人体穿戴WASD如图5所示。如图6所示,左右伺服电机通过两个U形连接板固定在皮带上,U形连接板起到助力臂的作用。当人弯腰到工作位置需要助力时,伺服电机转动带轮,从而拉紧拉力带实现弯腰助力。为了平衡拉力带的拉力,可伸缩下肢带一端被踩在脚底,一端与U形连接板下面的两个小连接台连接。为了适合不同体形的人的穿戴需要,肩带与下肢带都设计成可伸缩的(此处的可伸缩不是弹性的伸长或缩短,而是通过日字扣来伸长或缩短带子)。胸围带与皮带也可以根据不同人体的胸围与腰围尺寸调节到舒适的位置。
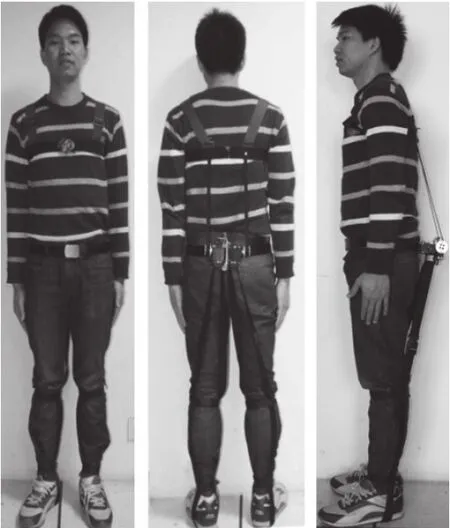
图5 人体穿戴实物前、后、侧视图Fig.5 Front view,back view and side view of subject wearing the WSAD

图6 伺服电机单元设计图Fig.6 Design of the servo unit
考虑到WSAD的轻便性,必须选择本身质量很轻且能输出大转矩的伺服电机,这里根据助力比选择的伺服电机额定转矩为22 kgf ·cm(7.4 V),尺寸:40.8×19.8×39 mm3,质量:62 g,PPM信号分辨率:2 ms,伺服电机的空载转速:62.5 r/min。伺服电机单元的设计和实物如图6和图7所示。
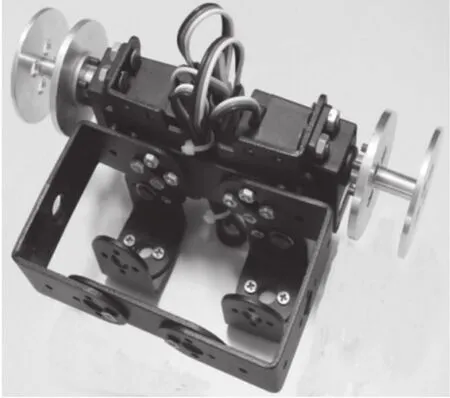
图7 伺服电机单元实物图Fig.7 Prototype of the servo unit
伺服电机的额定扭矩为22 kgf ·cm,拉力轴的半径为4 mm,即伺服电机可以输出539 N的力,由于WSAD有两根拉力带,则可以形成一个1078 N的外部拉力。当人体弯腰90o时,WSAD能形成一个0.137 m的力臂(L7),即背部拉力带能产生148 N ·m的助力矩。对于助力装置,轻便是很重要的,加工完成后的WSAD的总质量为0.357 kg(包括电池与控制器),十分轻便。一件普通夹克大约为620 g,而WSAD仅为357.4 g。
1.3 WSAD的自动助力控制
如图8所示,控制板、锂电池及电量报警器被安装在U形连接板上,图中的小手机是为了便于与实物比较大小而放置的。其中锂电池用来给伺服电机、控制板及角度传感器供电;电量报警器在锂电池电压低于5 V时报警,提示用户及时充电;控制板用来获取角度传感器的角度并适时驱动伺服电机。人向前弯腰时,角度传感器的角度会增大,当弯腰到工作位置并静态保持时,角度不会再增大,这时控制器会检测到这个角度不会再增大的信息,并控制伺服电机转动带轮,拉紧拉力带使人保持弯腰工作状态。当人需要恢复直立时,角度传感器的角度会减小,这时由控制器控制伺服电机转动带轮收紧拉力带使人直起身子。当角度传感器检测到角度等于0o(身体直立)时,伺服电机停止转动。

图8 控制板、锂电池和电量报警器的安装Fig.8 Installation of control board,lithium battery and low voltage buzzer alarm
2 肌电实验验证装置的有效性
2.1 肌电实验过程
影响背部活动的肌肉多达29类[17],背部竖脊肌是弯腰时控制弯曲的主要肌肉,也是最容易受伤的肌肉,因此,胸竖脊肌(TES)和腰竖脊肌(LES)的肌电信号应被测量。由于腹直肌(RA)的活动会增加脊柱的负载[16],所以腹直肌的肌电信号也应被测量。此外,肌电实验还测量了背阔肌(LD)的肌电信号。
肌电设备的第一通道测量TES的肌电信号,其电极放于T9上,距背部正中5 cm。第二通道测量LES的肌电信号,其电极放于L3的上,距背部正中3 cm。第三通道测量LD的肌电信号,其电极放于T7的上,距背部正中7 cm。第四通道测量RA的肌电信号,其电极放置在距肚脐侧边3 cm处。参考电极被放在C7的棘突之上。前三个肌电信号的通道位置如图9所示。
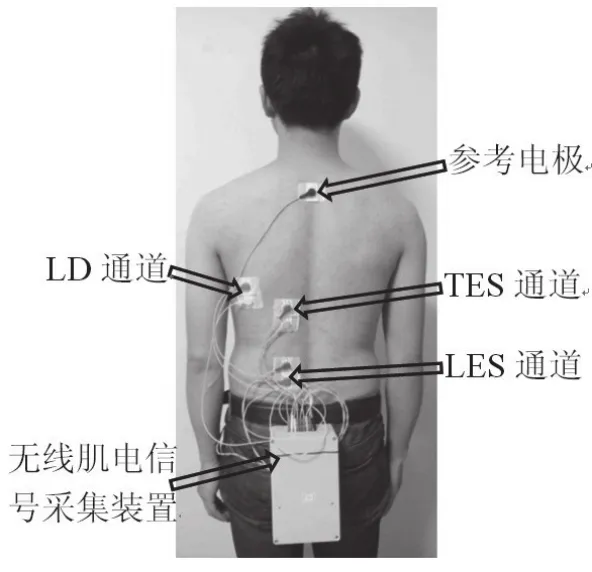
图9 背部肌电电极的位置Fig.9 Location of the EMG electrodes on the back
贴肌电电极的步骤:(1)先用砂纸轻擦贴电极的皮肤处;(2)将导线连接到电极扣上;(3)除去电极背面的防粘纸;(4)在要贴电极的部位贴上电极并抚平背衬。
肌电数据采集之前人体平躺30 min以充分放松身体,首先采集无WSAD助力时的肌电数据,分四次采集(一个周期),分别采集直立、弯腰30o、弯腰60o、弯腰90o四个姿势的肌电信号,每个姿势保持10 min,每两个姿势之间休息20 min,重复采集3个周期;休息30 min之后再采集有WSAD助力时的肌电信号,也分四次采集(一个周期),分别采集直立、弯腰30o、弯腰60o、弯腰90o四个姿势的肌电信号,每个姿势保持10 min,每两个姿势之间休息20 min,同样重复采集3个周期。为了保证每个周期的每个姿势都能保持在相同的角度上,使用角度传感器来确定每个姿势的角度。
对采集到的原始肌电信号,先分离出信号的直流分量,然后设计一个2阶的Butterworth带通数字滤波器,采样频率为1000 Hz,第一截止频率为3 Hz,第二截止频率为450 Hz[16],再用设计好的滤波器对原始肌电信号进行滤波。对处理后的信号做绝对积分,然后再用式(7)算出助力比(EMG下降比)。

其中ar为助力比,w、Nw分别代表有WSAD助力和无WSAD助力的肌电信号积分值(mV ·s)。
2.2 实验结果
肌电实验的结果如表1所示。表中给出了当人体处于四个弯腰姿势(0o、30o、60o、90o)时,在有WSAD助力和无WSAD助力两种情况下,被测肌肉的EMG积分值和相应的助力比。
2.3 讨论
我们的主要目的是开发一种用于减轻背部竖脊肌负担的可穿戴弯腰助力装置,并通过量化背部肌肉的肌电信号来评估装置的有效性。从以上的实验结果可以看出,当人体直立时,穿上WSAD之后,WSAD对被测肌肉的肌电信号基本上没有影响,如表1所示,TES、LES、LD、RA的EMG仅分别上升了0.72%、0.68%、0.81%、0.76%。当人体弯腰30o、60o以及90o时,WSAD显著地减少了TES、LES、LD的EMG信号。TES、LES的EMG信号可以预测人体低腰部位的压力与剪力,而过大的低腰压力与剪力就是引起LBP的主要因素[16],从而WSAD可以减少LBP的发生;并且RA的EMG信号的减少还可以减轻脊柱的负担。
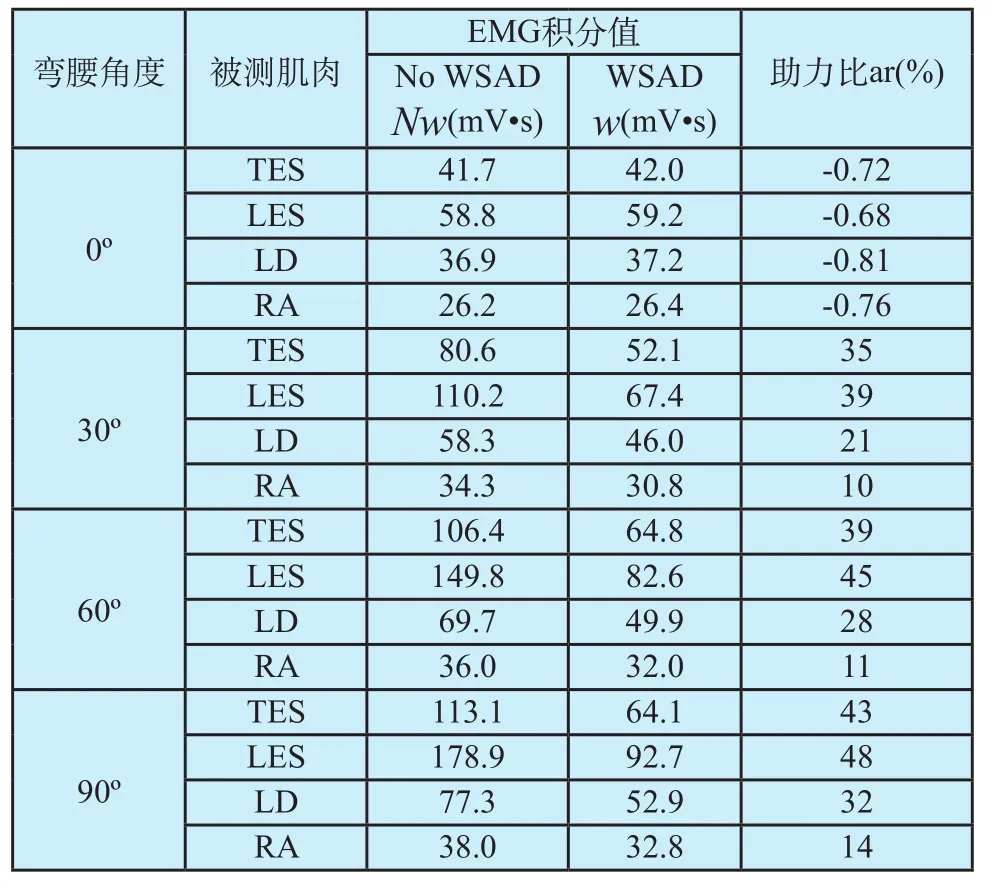
表1 被测肌肉的EMG积分值和助力比Tab.1 The integrated EMG and reduction ratio of the measured muscles
WSAD 在重量上是可以忽略的。由于可穿戴性,WSAD很容易与环境结合。WSAD的总质量只有0.357 kg,使人在弯腰工作时不会产生额外的负重感觉。利用角度传感器实现工作中弯腰姿势的静态保持。
由于我们做的是无创实验,所以只把电极贴在皮肤表面来测量肌肉的EMG信号,而不损伤人体,但这个实验方法是可行的,可以通过这样的方法来观测背部肌肉的活动[16]。
3 结论
根据人体生物力学,建立了人体弯腰时的静力平衡模型,并根据所建立的模型证明了助力原理,在此基础上开发了一种仅重0.357 kg的可穿戴弯腰助力装置。肌电实验表明,WSAD能显著减少竖脊肌的活动,从而有利于弯腰工作的工人,并减少LBP的发病率。需要指出的是,任何人类工效学装置的开发都需要工人、工效学装置开发人员以及相关领域的管理者一起配合进行,吸收他们有用的观点与建议。只有当工人接受已开发的工效学装置带来的好处时,工效学装置才是真正有用的。WSAD作为一种人类工效学装置,在接下来的研究中,要调查弯腰工作的工人对WSAD的可接受性以及研究长期使用WSAD带来的相关问题。
[1]BLS.Occupational outlook handbook[M].Washington,DC: US Department of Labor,Bureau of Labor Statistics.2006.
[2]Fathallah FA,Miller BJ,Miles JA.Low back disorders in agriculture and the role of stooped work: scope,potential interventions,and research needs[J].J Agric Saf Health,2008,14(2): 221-245.
[3]Kawai S,Yokoi H,Naruse K,et al.Study for control of a power assist device.Development of an EMG based controller considering a human model[C]. Proc IEEE ICIRS,2004,2283-2288.
[4]Naruse K,Kawai S,Kukichi T.Three dimensional lifting-up motion analysis for wearable power assist device of lower back support[C].Proc IEEE ICIRS,2005,2959-2964.
[5]Sato Y,Tanaka T,Kaneko SI,et al.Smart suit for agricaltual use (1st Report,A prototype of smart suit and its fundamental experiments)[J].Nippon Robotto Gakkai Gakujutsu Koenkai Yokoshu (CDROM),2006,24(3G24).
[6]Sankai Y.HAL: hybrid assistive limb based on cybernics[J].Robot Res,2011,66(2): 25-34.
[7]Kobayashi H,Uchimura A,Shiiba T.Development of muscle suit for upper body[C].Proc IEEE ICIRS,3624-3629.
[8]Zoss A,Kazerooni H,Chu A.On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX)[C].Proc IEEE ICIRS,2005,3465-3472.
[9]Ulrey BL,Fathallah FA.Effect of a personal weight transfer device on muscle activities and joint flexions in the stooped posture[J].J Electromyogr Kinesiol,2013,23(1): 195- 205.
[10]Abdoll-eramaki M,Stevenson JM,Reid SA,et al.Mathematical and empirical proof of principle for an on-body personal lift augmentation device(PLAD)[J].J Biomech,2007,40(8): 1694-1700.
[11]Wehner M.Man to machine,applications in electromyography[M]//Schwartz M.EMG methods for evaluating muscle and nerve function.Intech,2012: 427-454.
[12]基思 L 莫尔,阿瑟 F 达利 著,李云庆 译.临床应用解剖学(第四版)[M].河南: 河南科学技术出版社,2006.
[13]Morris JM,Lucas DB,Bresler B.Role of the trunk in stability of the spine [J].J Bone Joint Surg,1961,43(3): 327-351.
[14]Lander JE,Bates BT,Devita P.Biomechanics of the squat exercise using a modified center of mass bar [J].Med Sci Sport Exer,1986,18(4): 469-478.
[15]胡有谷.腰椎间盘突出症[M].北京: 人民卫生出版社,2004.
[16]Graham RB,Agnew MJ,Stevenson JM.Effectiveness of an onbody lifting aid at reducing low back physical demands during an automotive assembly task: Assessment of EMG response and user acceptability[J]. Appl Ergon,2009,40(5): 936-942.
[17]Agnew M.Kinetic and kinematic adaptations to use of a personal lift assist Device[D].Ontario,Canada: Queen’s University,2008.
