基于领域知识的海上编队线型队形识别
2013-12-02冷画屏关庆云吴晓锋
冷画屏,关庆云,吴晓锋
( 海军兵种指挥学院,广东 广州510430)
0 引 言
海上编队在执行作战任务时,通常采用一定的编队队形,如防空队形、反潜队形、护航队形、扫雷队形等,因此编队队形和目标机动类型[1-2]一样,也是能揭示目标战术意图[3]的一种重要特征。目前国内外文献已经有多种目标队形识别算法,如基于Hough 变换的识别算法[4-5]、基于空间方向相似性的识别算法[6]、基于BP 神经网络的识别算法[7]等,上述各种算法均取得了一定的识别效果,但均将编队队形作为一般的计算机图形来进行处理,算法相对比较复杂。实际上,目标编队队形具有丰富的领域知识特征,本文将在充分分析这些领域特征的基础上,提出一种简易识别算法,用于计算机对目标线型队形的自动识别。
1 海上目标基本队形及其队列要素
常用的海上目标线性队形有单纵队、单横队、双纵队、双横队、方位队、人字队、楔形队等,图1 列出了海上目标的基本队形。

图1 海上目标的基本队形Fig.1 The basic formation of naval fleet
由图1所示,编队队形的主要队列要素包括:基准目标及其位置、队形航向、队列线数目、队列方位。
1.1 队形航向
所有线型队形目标均有相同的航向和航速,这是海上目标线型队形组成的图像区别于其他几何图像的本质特征之一,同时,队形航向也是其他线型队形特征计算的基准之一。队形航向可用FormTC表示。
1.2 基准目标
所有线性队形均有1 至多个基准目标,该基准目标处于队形航向之首,基准目标是队形中其他目标保持其队形位置的基准。
1.3 队列线数目与队列方位
队列线是由基准目标开始,联结队列中各目标中心位置所在点形成的直线。海上目标线型队形有1 条或数条队列线,如图1所示,单纵队、单横队、方位队有1 条队列线,双纵队、双横队、人字队有2 条队列线,楔形队有3 条队列线。队列线数目可用表示。队列方位是指队列线与真北之间的夹角,按顺时针从0° ~360°计算,可用FormTB表示。
1.4 队列角
队列线与编队航向之间的夹角,以基准目标向右(左)舷0° ~180°计算,有右、左舷别之分,用α 表示队列角,则队列角与队形航向、队列方位的关系为

2 海上目标队形的特征及模板表示
由图1所示队形及其队列要素可分析得出,海上编队基本队形的特征包括:①由1 条或多条队列线组成,队列线以基准目标为基准,基准目标位于以队形航向之首或左侧;②队列线数目及各队列角共同决定了队形的类型。因此其队形模板可用如下二元组表示:

其中:n 为队列线的条数;αi为队列角的大小。由此,可将图1所示编队基本队形用队形模板表示如下:单纵队:{1,(180°)};单横队:{1,(90°)};方位队:{1,{(α)},‖α|-γ| >5°;双纵队:{2,(180°,180°)};双横队:{2,(90°,90°)};人字队:{2,(α1,α2)},α1=α2,‖α1|-γ| >5°;楔形队:{3,(α1,90°,α2)},α1=α3,‖α1|-γ| >5°;以上各模板表达中,γ=90°或180°。
3 海上目标队形识别的主要计算模型和算法
在对队形库中的所有队形按照式(2)所示模板进行编码后,便可对实际观测队形进行模板匹配了。根据模板的特征,识别算法的关键是获取观测队形的队列线条数和各队列角的大小,而队列线条数和队列角大小与队形中基准目标个数、队形航向及其他目标与基准目标的方位有关,下面详述识别中的主要数学模型和识别算法。
3.1 坐标变换
队列基准目标是队形中其他各目标保持队形的基准,行进过程中,其他各目标均向基准目标看齐,通常位于以编队航向为基准的最前侧或左侧位置。作战中目标坐标常以正北为y 轴,正东为x 轴,为了确定队形中目标以编队航向为基准的前、后、左、右的位置,需将坐标系旋转到以编队航向为y 轴,以其垂直方向为x 轴的新坐标系,然后根据其变换后坐标大小进行判断。
令队形中任一目标在作战坐标系的坐标为(x,y),则其在以编队航向FormTC为y 轴的新坐标系(本文称模板坐标系)中的坐标为:

以下讨论均在坐标变换后的模板坐标系中进行。
3.2 基准目标的选取和个数确定
由图1 可分析得出,队形基准点的个数和位置有2 种情况。一类是队形中存在单个基准点,该基准点通常居于队首,其他目标以其为基准,分布的各队列线上,根据队列线条数和队列角的大小可识别出相应的队形。第二类存在2 个或多个基准点和2 个或多个基准点为基准的队列线。
通过比较队形中目标各点轴坐标或值大小可区分以上2 类情况。
如图2所示,当队形中目标点(x1,y1),(x2,y2),满足

时,可认为2 点位于平行于X 轴的直线或位于平行于Y 轴的直线上,其中δ 是设定的1 个较小的值,其大小与队列中目标与基准点看齐时的角误差有关,若用雷达看齐,设雷达最大测角误差为Δ,则δ=tgΔ。通过以下步骤可区分队形存在多个基准点的情况。
1)搜索首个基准点坐标(x0,y0),其中y0=min(y1,y2,…,yn);
2)统计其他目标点坐标与基准点之间符合式(4)或式(5)的目标点个数,分别为p1,p2,若p1≥1 且p1≥p2则为横队,其中p2=0 时为单横队,p2=1 时为双横队,否则称p2+1 列横队,若p2>1 且p1<p2为纵队,队形名称与以上类似。若p1=0,则属于存在单个基准点的情况。
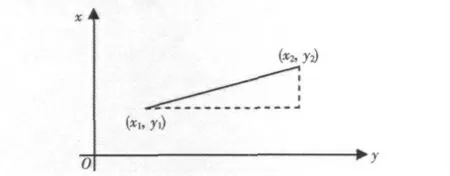
图2 队形中两目标点关系的判断Fig.2 The judgment of relation between two target′s points in the formation
3.3 队形中其他目标点相对基准点的队列方位计算
设队形中基准点坐标(x0,y0),队形中其他目标坐标为(xi,yi),令Dx=xi-x0,Dy=yi-y0,若Dy≠0,令

式中:当Dy>0 时,s=1;否则,s=-1。则目标相对基准点的方位

若Dy=0,则

上述目标方位单位为(°)。
3.4 目标是否位于同一队列线的判断
确定基准点后,若有多于或等于2 个目标点与基准点位于同一方位线上,则这些目标点与基准点共一条队列线,因此,只要多个目标点相对基准点的方位差值较小,则可判断此多目标点与基准点位于同一队列线。
2 方位角TBi,TBj之间的差值计算为

3.5 队形识别算法
步骤1:按3.1 所述进行坐标变换,下述步骤均在模板坐标系中进行;
步骤2:按3.2 所述选取基准点目标,确定基准点个数,按3.2 所述识别横队和纵队。若识别为横队或纵队,则队形识别结束,否则转步骤3。
步骤3:根据式(6)、式(7)和式(8)计算其他目标相对基准点的方位TB1,TB2,…,TBm-1,其中m 为目标个数;
步骤4:对TBi,i=1,2,…,m-1 进行聚类分析,2 方位角TBi,TBj之间的相似性度量值d(TBi,TBj)按式(9)计算。聚类分析[8]步骤如下:
①取TB1为第1 个聚类中心;
②选取TBj,TBj与TB1距离最大,即d (TB1,TBj)=max[d (TB1,TBk)],i=2,…,m-1;若d(TB1,TBj)<δ,δ 为雷达最大测角误差,则所有目标在同一队列线上,聚类结束,转⑤,否则将TBj作为第2 个聚类中心,转③;
③按式(9)计算除聚类中心外每个方位值至多个聚类中心的距离值,在每个方位值至多个聚类中心的距离值中,取其中较小者,令其为Dxi,得到最小距离值序列{Dxi};
④从{Dxi}中挑出最大值,若该值大于δ,则增加其为聚类中心,转③,若不满足该条件,则聚类结束。
⑤聚类中心个数即队列线条数,按式(1)计算每条队列线的队列角。
步骤5:根据队列线条数和队列角大小进行模板匹配,识别队形。
4 结 语
目标队形是指挥员指挥决策中对目标进行战术意图识别的重要依据之一,将上述目标队形的识别算法编制成计算机程序,并对实际队形进行识别仿真,发现文中所列队形均能进行正确识别。然而,本文所列算法仅能对线型队形进行识别,对非线型队形的识别将在下一步工作中进一步探讨。
[1]冷画屏,吴晓锋,余永权.水面目标机动类型的识别研究[J].舰船科学技术,2007,29(4):52-54.
LENG Hua-ping,WU Xiao-feng,YU Yong-quan.Study on surface ship maneuvering type recognition[J].Ship Science and Technology,2007,29(4):52-54.
[2]冷画屏,吴晓锋,王慕鸿.空中目标战术机动类型的实时识别[J].火力与指挥控制,2011,36(1):64-66.
LENG Hua-ping,WU Xiao-feng,WANG Mu-hong.Realtime recognition of air target t tactical maneuver type[J].Fire Control & Command Control,2011,36(1):64-66.
[3]冷画屏,吴晓锋,胡剑光.海上目标战术意图序贯识别技术[J].系统工程与电子技术,2008,30(3):29-31.
LENG Hua-ping,WU Xiao-feng,YU Yong-quan.Study on sequential recognition technique of marine targets′ tactical intentions[J].Systems Engineering and Electronics,2008,30(3):29-31.
[4]CARLOTTO M J.MTI data clustering and formation recognition[J].IEEE Transactions on Aerospace and Electronic Systems,1996,37(2):524-537.
[5]蔡益曹,张维明,贺玲,等.一种基于Hough 变换的线型群体队形识别方法[J].国防科技大学学报,2006,28(2):124-129.
CAI Yi-chao,ZHANG Wei-ming,HE Ling,et al.Formation recognition based on hough transform[J].Journal of National University of Defense Technology,2006,28(2):124-129.
[6]董受全,宋伟.基于空间方向相似性的编队队形识别算法[J].火力与指挥控制,2010,35(11):167-169.
DONG Shou-quan,SONG Wei.Identification algorithm of combat warship formation based on similarity between spatial directions[J].Fire Control & Command Control,2010,35(11):167-169.
[7]樊延平,薛长松.基于BP 神经网络的坦克分队战斗队形识别研究[A].第七届全国仿真器会议论文集[C],2010.226-229.
FAN Yan-ping,XUE Chang-song.Research on the Identification Model of Tank Element Battle Order Based on BP Neural Network[A].The Seventh National Conference on Simulator[C],2010.226-229.
[8]余旭初.模式识别与图像分类[M].北京:解放军出版社,2003.
YU Xu-chu.Pattern Recognition and Image Classification[M].Beijing:Chinese People′s Liberation Army Publishing House,2003.
