一种新型一体化推进装置控制系统的研制
2013-12-02吴团结蔡晓琴
吴团结,蔡晓琴,肖 清
(1.中国舰船研究设计中心,湖北 武汉430064;2.武昌船舶重工有限责任公司,湖北 武汉430064)
0 引 言
随着电力电子技术的发展,半导体开关技术、交流电机变频调速技术日渐成熟,船舶电力推进技术发展很快,出现了多种电力推进方式,如吊舱式电力推进(POD)、泵喷电力推进、一体化电力推进器(IMP)等。电力电子技术不仅彻底改变了舰船能量变换的面貌,而且使原先船舶电力推进存在的一些缺点发生根本性的转化,其优点和长处得到进一步发扬[1-2]。
本文研制的一种新型一体化推进装置用于船舶辅助和应急推进的设想,是当今模块化设计概念的产物,可以说是一种革命性的创新。它结合了吊舱式电力推进特点,就是推进用电机直接与推进螺旋桨相连,制成1 个独立的推进模块,并吊挂在船体底部。该推进模块可以360°旋转,推进的方位角可以人为地进行控制和调节;而且还具有像飞机起落架一样自动收放功能,能完全满足主推进系统无法完成的补充功能,如船舶的离、靠码头功能、应急推进功能、侧推功能等。该装置非常适用于无人潜器、轻型/重型鱼雷和潜艇等水下工作平台推进,必将为水下推进带来一次革命[3-8]。
1 新型一体化推进装置的工作原理及特点
1.1 工作原理
新型一体化推进装置主要由一体化推进器(integrated motor propulsor,IMP)及控制系统组成,如图1所示。
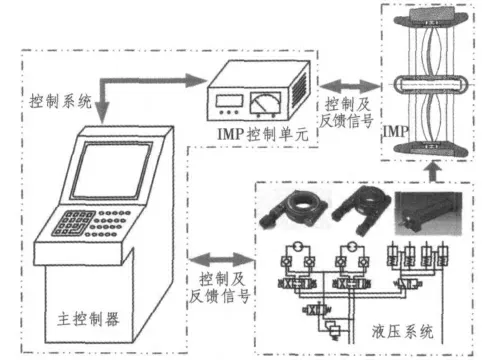
图1 新型一体化推进装置组成框图Fig.1 The composition block diagram of novel IMP
新型一体化推进器是将电机与推进器集成为一体的一种新型电力推进器,含永磁电机、螺旋桨、导管等;收放装置包括收放机构、旋转机构和锁紧机构及防波板启闭机构等,收放机构和锁紧机构由控制系统中的液压系统驱动;整个装置由基于CAN总线的控制系统进行控制和监测。
1.2 装置的特点
该一体化推进装置具备辅助推进、自行离靠码头等功能,可大幅提高船舶操纵和紧急机动的能力。在船舶设计、总体性能、制造及维护等方面带来诸多优点,归纳如下:
1)控制灵活。该一体化推进装置与传统的推进方式不同,电机与螺旋桨同轴而不是通过连轴器把电机的轴和螺旋桨连接起来,没有了严格的轴系对准问题,电机和螺旋桨的轴向可以根据需要改变,可在水平面360°内旋转,减小了船舶的回转半径,可倒车,极大地提高了船舶的灵活性。
2)功率密度高。该一体化推进装置浸泡在水中,电机的散热效果小,电机的热负荷设计可以提高,提高了电机功率密度;电机不再是位于舱内而是与螺旋桨同轴,节约了轴向空间,这可提高推进器的功率密度。
3)效率高。该一体化推进装置安装固定方式非常灵活,不再是单纯地固定在船尾,也就是说螺旋桨的进水口是完全敞开的,螺旋桨的流体特性得到了改进,提高了螺旋桨的效率;电机直接浸泡在水中,不需要电机的辅助冷却系统,节约了冷却系统的功率,提高了推进效率。
4)体积小、节省空间。该一体化推进装置中电机和螺旋桨一体化,电机移至舱外,节省了宝贵的舱内空间,便于全船优化布置,更好地提高空间利用率。
5)可靠性高。该一体化推进装置全部采用静密封,可靠性高,电机直接浸泡在水中,不需要电机水冷却套、电机辅助冷却系统、驱动轴和连轴器,可靠性得到提高。
6)低特征信号。该一体化推进装置结构紧凑,质量更轻,没有主传动轴,减少了机械和水动力噪声源,电机在驱动推进器时消除了传统推进装置因为传动而消耗的效率和噪声。
7)布置紧凑、灵活、方便。该一体化推进装置采用模块化设计,能充分利用船上富余空间,安装方便,且可后期安装,从而节省空间,缩短建造周期,降低成本,而且还具有一定的移植性。
2 新型一体化推进装置控制系统
2.1 控制系统研制
新型一体化推进装置主要控制内容为:推进装置的解锁/锁紧;推进装置的外放∕收回;推进装置的旋转;一体化推进器的工作(前进、后退及转速控制等)。
该一体化推进装置控制流程如图2所示,图2(a)和图2(b)分别为推进装置外放推进和收回艇内时的控制流程,虚线箭头表示该部分功能由哪个系统控制实现。推进装置的解锁∕锁紧、外放∕收回和旋转由液压系统实现,液压系统原理图如图3所示。一体化推进装置工作由其控制装置进行监测和控制。


该一体化推进装置控制原理如图4所示,控制系统分为2 级:现场控制和中央控制。基于CAN 总线的现场控制由下位机(PLC)、IMP 控制单元、逆变部分及传感器等构成,可实现对IMP 推进器的变频调速和对装置的自动控制,现场控制可用于装置的调试和维护。下位机可独立安全工作,通过满足全船信息化要求的接口与上位机相连,实现中央控制室对该装置的遥控[9-10]。

图4 新型推进装置控制系统原理框图Fig.4 The control system block diagram of novel IMP
1)上位机。上位机置于远端集控室或中央控制室,计算机通过采用CAN 总线协议与下位机(PLC)相连组成监控网络,通信介质采用屏蔽双绞线。主要作用是提供操作人员友好的人机界面(HMI),包括舷外推进装置运行流程、实时状态监测、报警页面和重要的运行控制运行参数修改界面等。
2)下位机。下位机采用PLC 进行控制,装置中IMP 控制单元(变频器)只完成调速功能,系统运算和控制功能由PLC 来完成,PLC 负责各种信号的逻辑关系,从而向IMP 控制单元(变频器)发出启停信号和调速信号,同时IMP 控制单元也将本身的工作状态输送给PLC 形成双向通信关系。
3)现场传感设备和执行机构。现场传感器主要是速度传感器、位置传感器等,用以监测现场信号,变送输出相应的物理量,如电压信号、电流信号、电阻信号等。执行机构主要是液动执行机构。
2.2 控制系统研制主要关键技术
1)一体化推进器(IMP)控制单元(逆变器)研制
IMP 控制单元主要完成一体化推进器本地运行控制和电力传输,主要是变频器的研制。变频器将直流逆变成交流,以实现IMP 变频调速和控制。IMP 控制单元分为主回路、控制硬件和控制软件。主要根据电机的设计参数来设计逆变器;通过Saber建模,采用相应的PWM 调制方式和控制策略进行系统仿真,探索了系统最佳的控制策略,控制参数等。
在研究过程中,着重关注两点:其一,如何抑制主回路所产生的谐波和电磁发射;其二,如何降低控制回路的敏感度,避免控制系统本身受干扰而误动作或停止工作。通过仿真和模拟试验,在电路板设计和结构设计中采取了大量行之有效的措施,如隔离开关电源作为驱动电源,软硬件滤波措施来减少系统干扰,为了降低输入端传导干扰设计了低频滤波电路和高频滤波电路等。
2)强弱电耦合导电滑环研制
推进装置中需要对一体化推进器进行收放和水平面内的旋转,由于空间狭小且转动角度大,一体化推进器所连电缆无法自行扭转,需采用导电滑环过渡连接。该导电滑环能同时传输强弱电,保证了信号不相互干扰,满足电力和信号的传输。
3)低速大扭矩液压回转驱动机构研制
一体化推进器收放及其在水平面内的旋转所表现的负载特性为低速大扭矩,集成了减速机和液压马达的液压回转机构(包括收放机构和旋转机构)是实现这种驱动功能的较理想方式。该机构采用摆线马达和蜗轮蜗杆减速器的组合方式,实现了低速大扭矩的液压回转驱动,并可进行自锁,满足驱动要求。
3 结 语
新型一体化推进装置采用模块化设计理念,突破了永磁电机与螺旋桨集成技术,永磁电机的电磁设计、结构设计按照导流管的特性来设计,既保证了电机的效率和结构强度,又符合流体设计,可使总体性能最优。作为一种新的技术和发展方向,以及适应未来应用的环境情况,该装置还需要进行大量的研究、试验和验证工作,如材料研究、密封技术研究、防沙技术研究以及相关的性能试验和验证等工作。
[1]刘波,张大有.一种新型的电力推进系统[J].武汉理工大学学报,2004(5):748-751.
LIU Bo,ZHANG Da-you.A new electric propulsion system[J].Journal of Wuhan University of Technology,2004(5):748-751.
[2]冀路明,王庆周.二十一世纪的Azipod 吊舱式电力推进系统[J].船舶工程,2002(2):61-64.
JI Lu-min,WANG Qing-zhou.Azipod electric underwater pod propulsion system for Century 21[J].Ship Engineering,2002(2):61-64.
[3]聂鹏瑜,张维竟,刘卓.吊舱式电力推进的现状及应用前景[J].造船技术,2003(2):3-5.
[4]李锡群,王志华.电机/推进器一体化装置(IMP)介绍[J],船电技术,2003(2):5-6.
LI Xi-qun,WANG Zhi-hua.Introduction to integrated motor/propulsor(IMP)[J].Marine Electric & Electric Technology,2003(2):5-6.
[5]SSP 推进器——一项独特的设计[J].国际船艇,2000(4).
[6]SIEMENS A G.The SSP Propulsor:An Ingenious Podded Drive System[Z].2001.
[7]BACKLUND A,KUUSKOSKI J.The contra rotating propeller(CRP)concept with a podded drive[C].Motor Ship Conference,Amsterdam,2000(3):28-29.
[8]ABB Azipod Oy.System Description,2002-02-22.
[9]吴团结.基于CAN 总线技术的舰船动力系统综合控制[J].中国舰船研究,2006(2):70-74.
WU Tuan-jie.CAN-bus-based integrated control of ship power system[J].Chinese Journal of Ship Research,2006(2):70-74.
[10]SIEMENS 公司.STMATIC S7-200 可编程序控制器系统手册[M],2002.
