自由摆平板系统高精控制设计
2013-12-01侯涛赵贺
侯涛赵贺
(兰州交通大学自动化与电气工程学院,甘肃 兰州 730070)
0 引言
本文以2011年全国大学生电子设计竞赛题目为背景,设计并制作了一个自由摆平板控制系统。其结构是将摆杆的一端通过转轴固定在一支架上;另一端固定安装一台电机,并将平板固定在电机转轴上。当摆杆摆动时,驱动电机可以控制平板自由转动。
系统的基本要求是:通过控制电机,使平板可以随着摆杆的摆动而旋转3~5个周期;摆杆摆动一个周期平板旋转一周,偏差绝对值不大于45°;用手推动摆杆至30°~60°之间的角度θ,在平板中心稳定放置1枚或8枚1元硬币,启动后放开摆杆让其自由摆动;在摆杆摆动过程中,要求硬币不从平板上滑落。
在平板上固定一激光笔,光斑照射在距摆杆150 cm距离处垂直放置的靶子上。当摆杆垂直静止且平板处于水平时,调节靶子高度,使光斑照射在靶纸的某一条线上,标志此线为中心线。手动推动摆杆至30°~60°之间的角度θ,启动后,系统应在15 s内控制平板并尽量使激光笔照射在中心线上,完成后以LED指示。
1 系统整体方案设计
充分利用各模块的优势,最终设计的系统结构框图如图1所示。

图1 系统结构框图Fig.1 Structure of the control system
该自由摆平板控制系统由数据采集模块、调理电路模块、步进电机驱动模块和LED显示模块等部分构成。系统通过光电编码器的检测获得自由摆的转角[2-5],通过算法程序换算得到平板应该转动的方向与角度,并产生相应的控制量;通过驱动模块使步进电机转动[6-7],从而带动平板转动,达到平板的平衡状态。然而,此处的控制是开环控制,无法获知电机转动是否达到期望角度,因此,需增加另一路检测。在此,采用角度传感器[8]检测转动后的实时角度,再将该角度值反馈到控制器进行比较,形成闭环控制。
2 伺服闭环控制设计
2.1 基本部分建模与设计
伺服闭环控制基本部分的设计要求是在摆杆自由摆动过程中,控制平板保持平衡状态,使硬币不从平板上滑落。
由自由摆系统原理可知,控制平板状态要保持平衡,即摆杆摆动多少角度,平板就需要转动相应角度。平板平衡示意图如图2所示。光电编码器作为检测装置安装在与摆杆固定点同轴方向,用于检测摆杆转动的角度。

图2 平板平衡示意图Fig.2 Schematic of the balancing of flat panel
为了提高控制精度,还需设计另一路角度传感器检测,用于检测平板实时转动的角度。角度传感器与平板平行安装,并可随平板一起转动,将检测角度反馈到控制器进行比较,从而形成伺服闭环的高精度角度控制[9]。
角度传感器的原理是根据角度的变化输出相应的电压变化(0~5 V),其平衡位置值为1650 mV,得到输出电压与角度的关系式为:

式中:Vout为速度传感器的电压输出值;k为近似的线性对应系数;θ为倾斜角度。
因此,倾斜角度可以通过下式计算得到:

通过分析角度传感器的输出电压值可知,当θ在-60°~+60°的范围内变化时,其输出电压变化范围为930~2330 mV,可计算得到k=800。
2.2 发挥部分建模与设计
伺服闭环控制的发挥部分要求是激光笔在摆杆自由摆动的过程中,照射在靶子上的光斑始终位于靶子的中心线上。根据自由摆摆动时平板运动的状态,可得到激光笔定位模型图,其示意图如图3所示。

图3 激光笔定位模型图Fig.3 The positioning model of laser pen
通过分析摆杆摆动的角度和平板相对水平方向的转动角度,建立数学方程式;然后通过算法实现摆杆运动过程中步进电机的精确控制[10]。
已知参数 r=1 m、l=1.5 m,可得 α1、α2,具体的计算方法如式(3)、式(4)所示:

2.3 伺服闭环控制实现
根据上文分析可知,若想提高控制精度,需采用双传感器技术。其中,光电编码器用来检测自由摆的摆角,角度传感器用来检测平板的转角,且转角控制采用伺服闭环控制,其控制框图如图4所示。
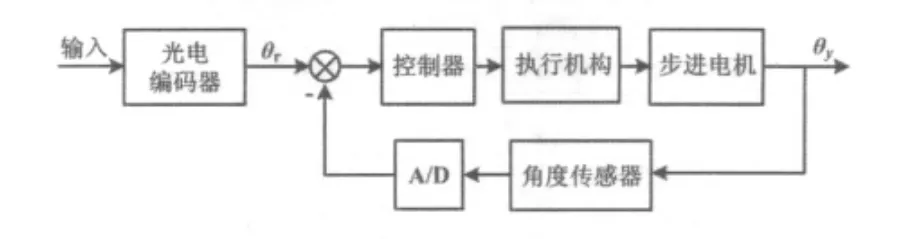
图4 平板角度闭环控制框图Fig.4 Block diagram of the closed-loop control for flat panel angle
具体控制程序流程图如图5所示。

图5 控制程序流程图Fig.5 Flowchart of the control program
3 测试结果与分析
3.1 测试结果
平板旋转角度控制与放置1枚硬币平板的平衡状态控制较简单,测试结果较理想,与单一传感器控制(最早按单一角度传感器设计)没有明显区别。但对于放置8枚硬币平板的平衡状态控制,双传感器优势明显,单双传感器对比测试结果如表1所示。
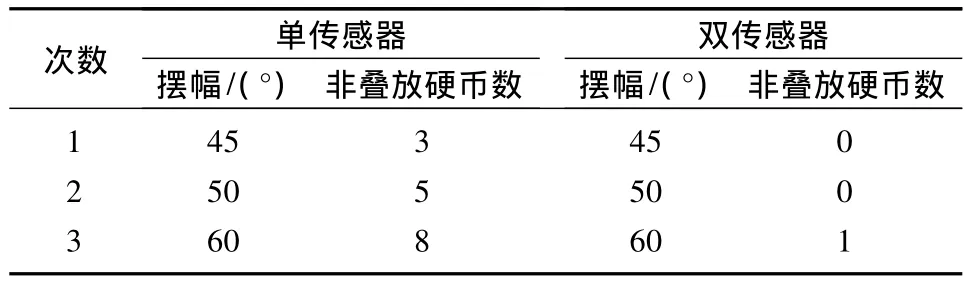
表1 基本部分测试对比表Tab.1 Intercomparison of tests for essential part
发挥部分启动后平板的平衡状态对比测试结果如表2所示。

表2 发挥部分测试对比表Tab.2 Intercomparison of tests for exerted part
3.2 测试分析
根据测试结果可知,单传感器测试的误差较大,双传感器设计具有很高的精度。究其原因是由于单传感器是开环控制,而双传感器是伺服闭环控制,所以精度高。但在测试过程中,步进电机偶尔会发生抖动,硬币容易滑落。大量分析表明,步进电机执行过程中产生的扰动容易造成传感器输出不稳定。其解决方法是把传感器安装在离电机较远而又能保持与平板平行的位置,即在摆杆的中上部水平安装。测试结果表明,该方法较好地满足了设计要求。
4 结束语
根据控制要求,设计了双传感器伺服闭环控制方法。该方法实现了高精度控制。由于步进电机偶尔会发生抖动,虽然进行了分析处理,但精度和准确度仍有待进一步提高。下一步工作将用直流电机代替步进电机进行设计研究。
[1]朱秀梅.基于Cortex-M3+ARM的自由摆平衡控制系统的研究[D].南京:东南大学,2010.
[2]李拥军,杨文淑.光电编码器测速算法的IP核设计[J].长春理工大学学报:自然科学版,2008,31(3):35-37.
[3]侯涛,范多旺.基于增量式光电编码器的高精数字测速应用研究[J].自动化与仪器仪表,2010(6):9-10,14.
[4]肖本贤.一种提高转速测量范围与精度的新方法[J].自动化仪表,1997,18(11):21-23.
[5]谷海涛,颜湘武,曲伟.正交解码电路和捕获单元在转角和转速测量中的应用[J].电气应用,2005,24(1):113-115.
[6]牛宏侠,侯涛.一种提高智能赛车速度和平稳性的方法[J].兵工自动化,2011,30(3):72,85.
[7]牛宏侠.基于拉格朗日方程的小车跷跷板状态反馈控制研究[J].兰州交通大学学报:自然科学版,2008,27(4):99-101.
[8]吴秀芹,高国伟,李倩芸,等.倾角传感器自动标定系统的研究[J].传感器与微系统,2009,28(4):54-55.
[9]张莉,朱海洋.混合模糊控制器在伺服控制系统中的应用[J].自动化仪表,2010,31(6):21-23.
[10]原立家,祝连庆,董明利.高精度的步进电机控制系统设计[J].北京机械工业学院学报,2006,21(1):47-48,57.
