长基线系统导航阵型设计*
2013-11-28刘百峰
刘百峰 罗 坤
(91388部队 湛江 524022)
1 引言
长基线水声导航定位系统[1~3]是水下目标试验鉴定的必需设备,该系统正式工作前必须首先完成对海底应答器的布放,根据不同的试验测量要求,布放不同的试验测量阵形。不同的阵形有不同的适用场合和不同的导航定位精度。常用的阵形有:矩形阵、三角形阵、星形阵和菱形阵等,同时,由于阵型设计决定了测阵航路设计,其精度直接影响导航定位精度。本文通过对矩形阵型及三角形阵型进行仿真比较并分析影响系统精度的几种情况,提出最优的系统海底阵型设计[4]。
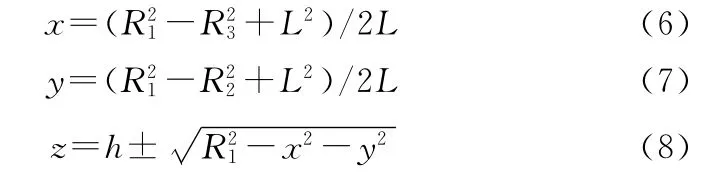
2 长基线水声定位系统定位原理
以三个水听器组成的最简单的长基线定位系统为例,说明长基线水声定位系统的基本原理[5~6]。在 海 底 布 设 由三个水听器T1、T2、T3组成的接收基阵,在直角坐标系中,它们的位置分别为 T1(x1,y1,z1)、T2(x2,y2,z2)、T3(x3,y3,z3),如图1所示。在对这些水听器本身的的坐标位置进行测量校准后,则它们的坐标位置为已知的量。各个水听器后面都接着一路接收、检测信号预处理电路。用应答器测量目标到各个水听器间的斜距值ri(i=1,2,3),得出三个水听器坐标位置为中心的三个球面。三个球面将相交于由三个水听器确定的平面以上和平面以下半个空间的两个点上,即有两个解,这有可能造成定位模糊。为解决这一问题,一般是将水听器布放在水底,则两个解中位于该平面以下的解可以排除。可用解析法来得出目标的位置坐标T(x,y,z)。
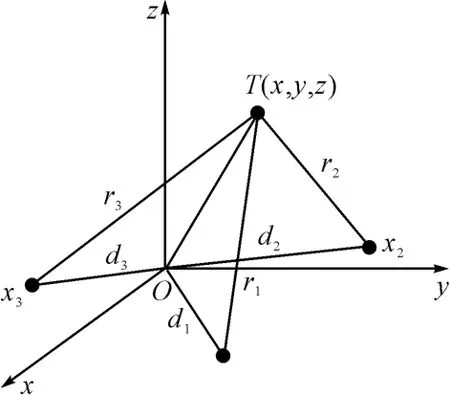
图1 长基线导航示意图
3 阵型仿真分析
海底应答器阵分系统由多个应答器组成。由于不同的阵形有不同的适用场合和不同的导航定位精度。根据测量区域要求,阵元有多种测量布局可供考虑[7]。
3.1 矩形阵
首先考察矩形级联阵,如图2所示。测量阵形按矩形布放,取四个应答器船的坐标分别为:S1(0,0,h),S2(0,L,h),S3(L,L,h),S4(L,0,h)。L=5km,h=58m为测量换能器深度。
阵元呈矩形排列,用距目标最近的三个基元进行定位解算。三基元呈等腰直角三角形,将上述参数带入球形定位方程,得到:

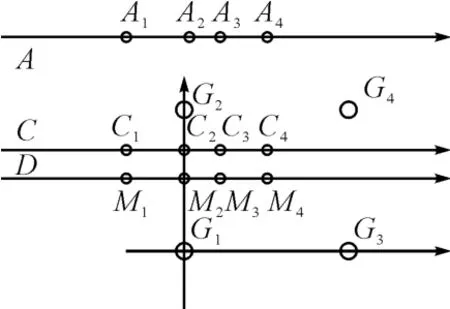
图2 矩形级联阵示意图
线性化后得到:

容易解得:
求全微分,得:
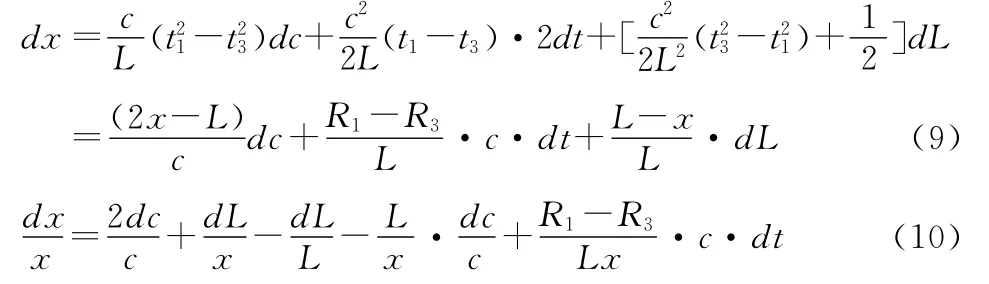
由式(9)、(10)可见,x的定位误差由声速测量误差、测阵误差和时延估计误差三部分构成。前两项影响主要表现为相对定位误差,测阵误差引起的相对定位误差与相对测阵误差相当,还与测量距离有关,声速测量误差引起的相对定位误差为相对声速测量误差的两倍。时延估计误差的影响取决于应答器到两测量点的距离差与测量点间距之比。目标在阵内相对对称位置,基线越长,误差越小。
取R1-R3=5km,L=5km,DGPS测阵误差为ΔL=2m,时延估计误差为Δt=1ms,声速测量误差影响较小,可以忽略,则Δx=0.5‰x+3.5m。同理可求得Y方向定位误差约为Δy=0.5‰y+3.5m。则总定位误差约为1.2‰。
3.2 三角形阵
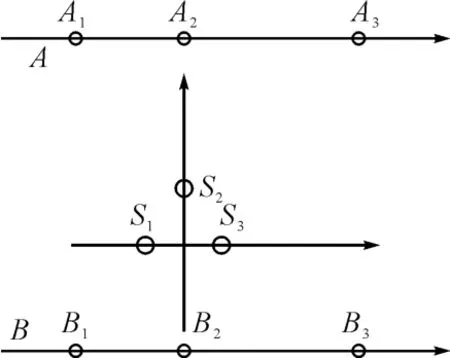
图3 三角级联阵示意图

下面分析采用三角形阵时系统的定位精度。
目标在测量阵外,如图3所示,S1、S2、S3为阵元,A1、A2、A3、B1、B2、B3为目标点位置。仿真结果与前面类似的分析可以求得x、y的误差分别为
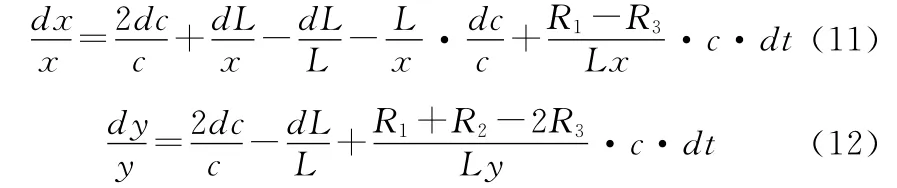
比较式(9)、(10)和(11)、(12)可以看出,在相同参数条件下,等腰三角形布阵的定位精度比等腰直角三角形布阵的精度略低。
取R1+R2-2R3=10km,R1-R3=5km,L=3.5km,DGPS测阵误差为ΔL=2m,时延估计误差为Δt=1ms,声速测量误差影响较小,可以忽略,则Δx=0.57‰x+4.1m。同理可求得Y方向定位误差约为Δy=0.57‰y+4.3m。则总定位误差约为1.34‰。
由仿真结果可以看出,采用阵形2时,在相同的测量误差条件下,系统的定位误差要大于阵形1。因此,在可能的条件下,为得到较高的测量精度,试验过程中应尽量采用矩形阵。但是三角形阵能在最少应答器的基础上达到最大测量范围。
上述结论是在定点分析的基础上得出的。表1给出了目标在深度已知(深度200m),由测时误差和测阵误差引起的定位误差对目标定位精度影响的仿真结果。
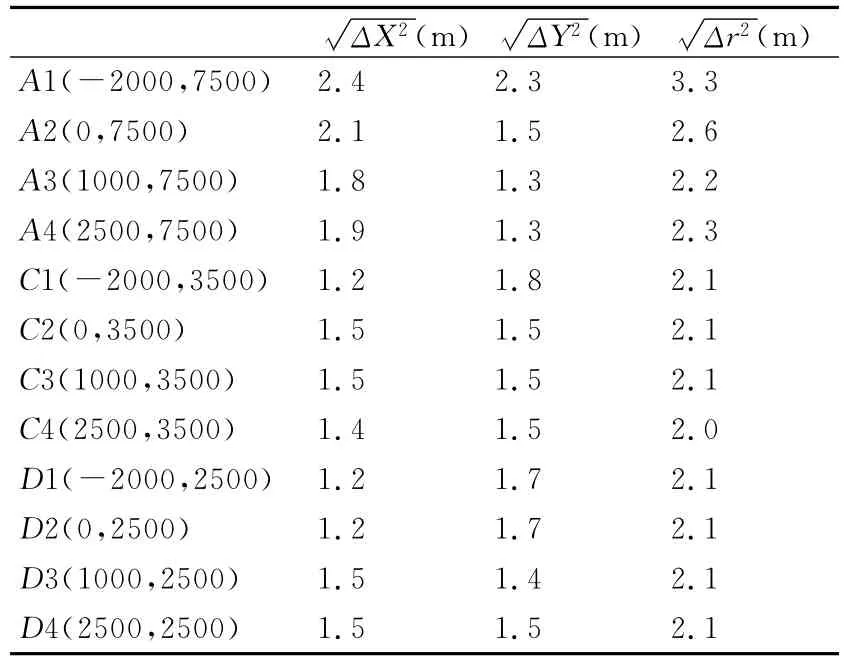
表1 三角形阵测时误差(-1ms,1ms)+测阵误差(-2m,2m)
由表1可以看出,对同步定位系统,目标在阵内测量精度较高,阵外精度略差。测量船的坐标误差对应答器的定位精度影响比较大,引起的定位误差与测量船的坐标误差大致相当,这就要求DGPS有足够的精度才能保证应答器的定位精度,从而保证整个定位系统的定位精度。目标到测量矩阵的距离较近时,测量误差相对较小,随着距离的增大,误差随之增大。
3.3 星形阵
布阵按星形,S1、S2、S3、S4、S5为布放阵元。通过分析可知
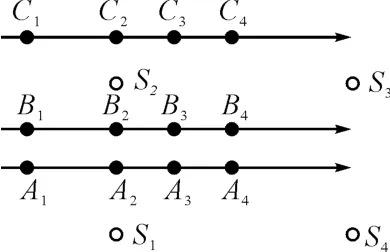
图4 星形阵示意图
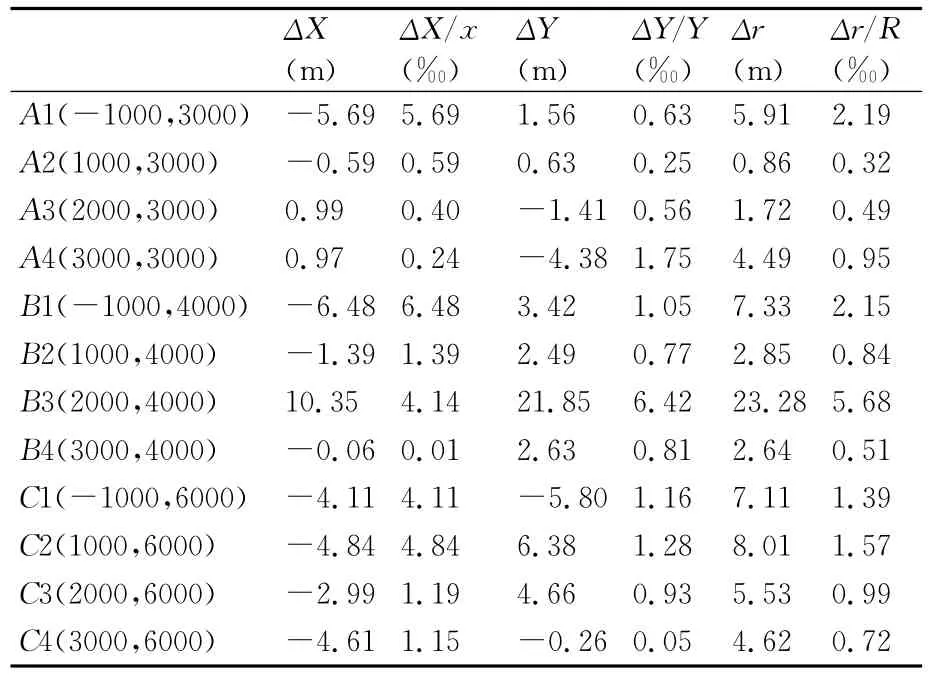
表2 星形阵测阵误差(-2‰,2‰)+测距误差(-3‰,3‰)
由表2可以看出,目标到测量矩阵的距离较近时,测量误差相对较小,随着距离的增大,误差随之增大。
3.4 菱形阵
布阵按菱形,边长4km,S1、S2、S3、S4为 阵 元,其 坐 标 分 别 为 (1000,1000),(3000,3464)、(7000,3464)、(5000,1000),深度为160m。
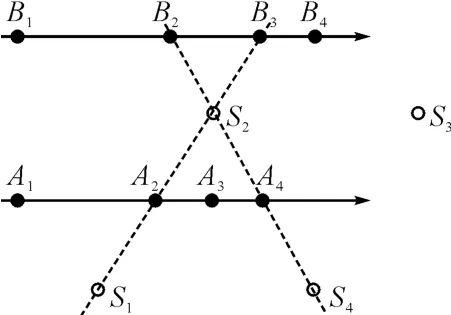
图5 菱形级联阵示意图
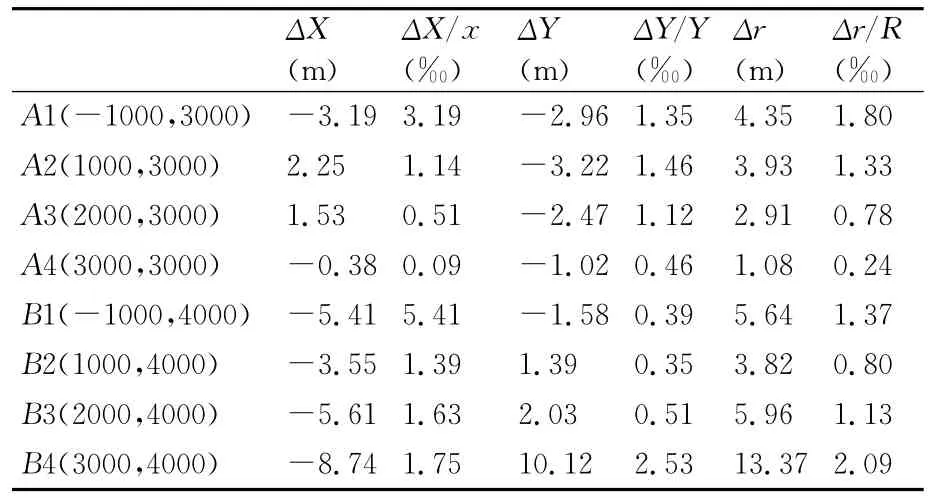
表3 菱形级联阵测阵误差(-2‰,2‰)+测距误差(-3‰,3‰)
由表3可以看出,目标在阵内测量精度较高,阵外精度略差。测量船的坐标误差对应答器的定位精度影响比较大[9],引起的定位误差与测量船的坐标误差大致相当,目标到测量矩阵的距离较近时,测量误差相对较小,随着距离的增大,误差随之增大。
4 海试验证
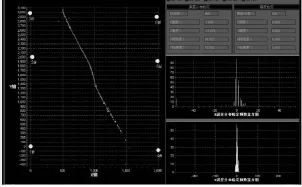
图6 海试结果图
图(6)是在南海某海域试验中采用的阵型设计,由于需要对目标进行精确定位,因而采用了矩形阵,目标在阵中行走。良好海况,海深60m,声速1500m/s,目标声头深度6m,浮标声头深度25m,系统同步周期6s。目标船以小于5节航速在阵中低速航行。
从导航软件可以看出,运动目标轨迹与目标自带GPS的轨迹几乎重合,证实了矩形级联阵的精度符合要求。
5 结语
经过对长基线系统几种可能的布放阵型进行仿真分析,提出了在不同要求下适合长基线导航的阵位设计;并且对其中的矩形阵进行海试验证,在良好水文环境下完全达到了试验要求。
[1]Daniel B Kilfoyle,Arthur B Baggeroer.The state of art in underwater acoustic telemetry[J].IEEE JOE,2000,25:4-27.
[2]丁士圻.对水下目标的大地坐标测量[J].海洋工程,1996(2):23-29.
[3]殷冬梅,等.无线遥控浮标式水下目标跟踪定位系统[J].系统下工程与电子技术,2004,26(9):1246-1249.
[4]CAI Yanhui,et al.Underwater GPS Positioning System[C]//International Symposium on GPS/GNSS 2005.HongKong,2005.
[5]王权,等.差分GPS水下立体定位系统[J].测绘科学,2006,31(5):18-21.
[6]刘林泉.水声综合测控系统关键技术研究[D].哈尔滨:哈尔滨工程大学,2008,3:49-55.
[7]焦君圣,等.定位浮标在波浪中的动态响应[J].海洋技术,2003,22(4):14-17.
[8]王泽民,罗建国,陈琴仙,等.水下高精度立体定位导航系统[J].声学与电子工程,2005(2):1-3.
[9]黄韦达.长基线定位导航系统浮标水声软件设计[D].哈尔滨:哈尔滨工程大学硕士论文,2008:85-96.