舰艇真航向动态测量中方位角解算的影响因素分析*
2013-11-28王海波陈荣娟胡宏灿
王 佳 王海波 陈荣娟 胡宏灿
(1.海军大连舰艇学院研究生管理大队 大连 116018)(2.海军大连舰艇学院航海系 大连 116018)
1 引言
舰艇真航向动态测量研究主要采用计算方位和测量舷角相结合的方案,即采用高精度定位设备所获取的舰位信息和被观测岸标位置点坐标计算出岸标的大地方位角,并采用电子经纬仪测量岸标的舷角,再利用航向角、方位角和舷角三者之间的关系,解算出舰艇的真航向[1]。由此看出方位角的精度是航向动态检测精度的一个重要因素。
方位角的测量是利用GPS接收的舰位信息和被观测岸标位置点坐标通过大地主题解算得到的。大地主题解算方法通常精度较高,因此方位角精度主要受GPS定位精度和岸标位置精度的影响。其中被观测岸标位置点经纬度是由大地测量得到,其精度通常比较高,一般国家三等点ΔS1=±0.16m,军控一等点ΔS1=±0.5m,海控二等点ΔS1=±0.4m。所以只需要考虑获取的舰艇位置精度。而在实际安装中,GPS天线通常安装在后甲板高处。这样GPS的定位精度一方面受本身定位精度制约,另一方面则受到GPS天线高度和舰艇纵横摇的影响,都会对方位角测量产生影响。经纬仪使用时一般安装在前甲板艏艉线上,与GPS安装的位置不同。这样由于两者位置的不重合就带来了方位角解算误差。
本文将从理论上分析舰艇纵横摇和GPS天线高度对GPS定位的影响、GPS与经纬仪安装位置不重合对方位角解算的影响。
2 纵横摇和GPS天线高度对GPS定位的影响分析
舰艇位置是由GPS接受机实时提供的。在选择安装位置时,为了保证GPS可以正常工作,其天线一般安装在舰艇后甲板高处。当舰艇处于航行状态下,由风浪、暗流等引起的舰艇纵横摇运动会使得天线产生摇摆,进而影响舰艇GPS定位精度,下面主要分析舰艇纵横摇和GPS天线高度对定位的影响。
假设在甲板坐标系(OXbYbZb)下,GPS天线中心G在甲板面的投影点为O,此时GPS天线中心G相对原点O的三维偏移量为ΔxGb、ΔyGb、ΔhGb;而在舰艇地理坐标系(取地理坐标系为东北天坐标系—OXtYtZt)下,GPS天线中心G相对原点O坐标偏移量为ΔxGt、ΔyGt、ΔhGt。利用甲板坐标系与地理坐标系的变换关系可以得出[3]。
式(1)中,H、P、R分别为舰艇的艏向角、纵摇角、横摇角;Ttb为甲板坐标系向地理坐标系变换时的变换矩阵。

则有GPS的定位误差可以由以下式(2)得出:

从上述分析中可以看出定位误差与舰艇纵横摇和GPS天线高度有关。文章会从后面进一步仿真分析两种因素对定位的影响大小。
3 GPS和经纬仪安装位置不重合误差分析
3.1 误差分析
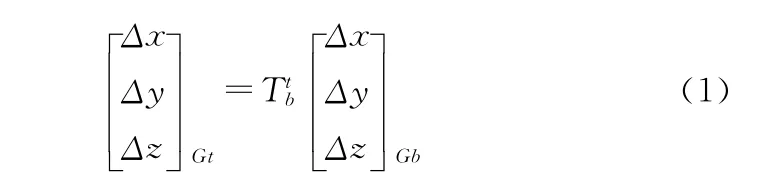
如图1所示,假设在舰艇上经纬仪、GPS天线分别安装在M和M′点,且两点在艏艉线上;P点为岸标位置。由安装示意图可知两点的水平距离为lm,相当于GPS水平定位误差增加了lm,将引起计算方位角误差ΔA。可以通过实地测量精确获取l值,再根据舰艇导航设备提供的航向H,对GPS定位的平面坐标误差进行修正。
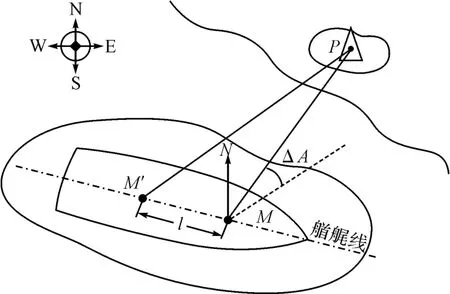
图1 GPS天线和经纬仪安装位置平面示意图
通过修正GPS位置得到经纬仪的精确坐标后,再进行岸标的真方位解算。因为l可以精确量取,舰向H的误差也不大,因此剩余误差就可以忽略不计,从而保证测量精度。
图2 GPS天线和经纬仪实际安装示意图
但是,为了保证GPS正常使用,GPS天线一般安装在舰艇的高处,而经纬仪一般安装在舰艇的主甲板上,如图2所示,两者有较大的高程差。这样,在舰艇摇摆的情况下,又另外增加了两者在水平位置上的不重合,从而带来测量误差,这样仅采用上述方法进行误差修正是无法满足要求的。因此,在修正误差时,还需考虑舰艇摇摆的影响。所以在经纬仪和GPS天线安装完好以后,需要首先测量出GPS天线相对于经纬仪望远镜旋转中心在甲板坐标系内横向、纵向和垂向距离,然后利用坐标转换原理和归心改正计算原理,将GPS天线位置归化到经纬仪安装中心位置[5],从而得到经纬仪安装位置的大地坐标,再进行大地方位角解算,从而提高岸标真方位测量精度。
3.2 修正数学模型
在甲板坐标系内,设测量装置测得GPS天线中心相对于经纬仪中心的三维偏移量为(Δx,Δy,Δz)b。地理坐标系下GPS天线相对于经纬仪中心的三维偏移量(Δx,Δy,Δz)t可以由变换公式(3)求出。
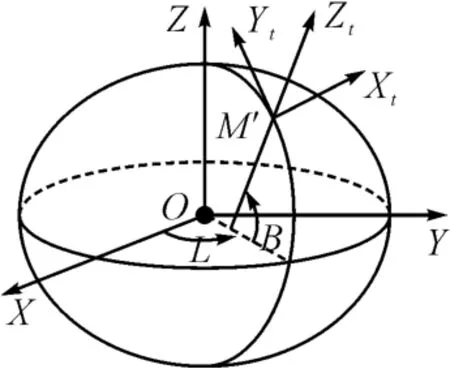
图3 地理坐标系和地心固定直角坐标系关系图
设GPS天线中心相对于经纬仪望远镜中心位置的偏移量在地心固定直角坐标系中的三维坐标分量 (Δx,Δy,Δz)。地理坐标系(东北天坐标系)和地心直角坐标系之间的相对关系如图3所示[6]。
图中,O-XYZ为地心固定直角坐标系,M′-XtYtZt为地理坐标系。
设由地理坐标系转换到地心固定直角坐标系的坐标变换矩阵为R,已知GPS测出的M′点的大地坐标为(L′ ,B′,h′),则
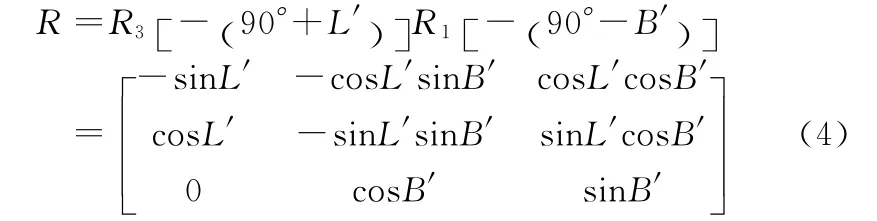
式中,R3、R1为旋转矩阵。
则地心固定直角坐标系中的三维坐标分量(Δx,Δy,Δz)可由式(5)求出。
故M′点在地心固定直角坐标系中的直角坐标(x′ ,y′,z′),即:
4 仿真与分析
舰艇真航向动态测量一般在三级海况以下进行。为了模拟舰船在海上的航行环境,作如下假设:假设在风浪洋流的影响下,舰艇纵摇角、横摇角的摇摆变化规律用下述模型简化描述[12]。
其中Pm、Rm分别为舰艇的纵摇角、横摇角变化的最大幅值;TP、TR分别为摇摆周期;ψP、ψR分别为纵摇、横摇的初始相位角;P0、R0分别为舰艇的初始姿态角。仿真时纵摇角最大幅值取3°,摇摆周期为15s,初始相位和初始姿态角均为零;横摇角最大幅值取3°,摇摆周期为10s,初始相位为270°,初始姿态角为零。
已知测得GPS天线距离甲板高度ΔhGb为4m,舰艇纵横摇采用上述模型,取仿真时间60s,得到GPS定位误差随舰艇纵横摇的变化曲线。
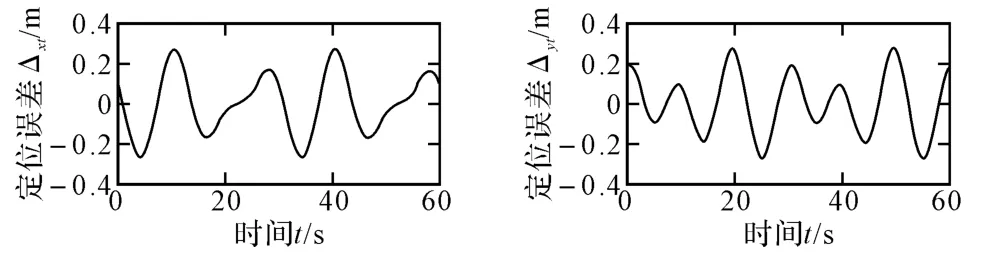
图4 ΔhGb=4m时GPS定位误差随舰艇纵横摇的变化
若在舰艇纵横摇相同的情况下,取GPS天线高度分别4m、6m、8m通过仿真得到GPS定位误差随天线高度的变化曲线。
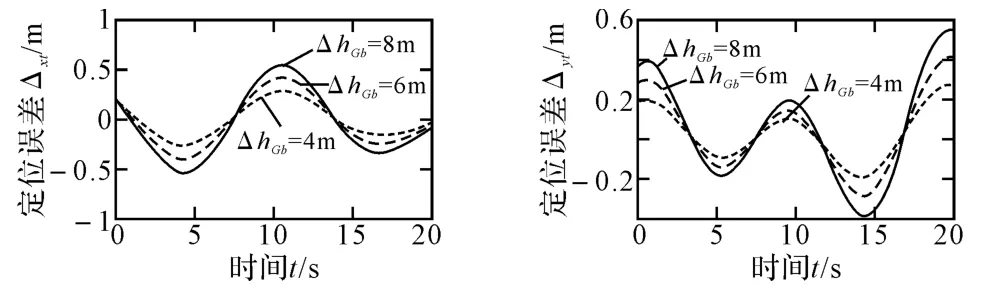
图5 ΔhGb分别为4m、6m、8m时的GPS定位误差变化曲线
仿真结果可以看出,GPS天线高度为4m时,GPS定位最大误差为±0.3m;而在纵横摇情况相同下,GPS定位误差随GPS天线高度的增大而变大,但是最大定位误差在±0.5m。所以若采用的GPS水平定位精度在1m以内时,GPS天线高度和舰艇纵横摇都会对GPS定位产生较大影响,需要对定位误差进行补偿;若采用的GPS水平定位精度5m以上,在这里可以忽略两种因素的影响。
利用舰位信息和岸标位置信息通过高斯投影法计算得到的方位角为A′。GPS的舰位信息归化到经纬仪处后,利用经纬仪位置信息与岸标位置信息通过高斯投影法计算得到的方位角为A,方位角因GPS与经纬仪安装位置不重合产生的误差则为ΔA=A′-A。
甲板坐标系下,GPS天线中心相对经纬仪旋转镜中心在甲板面上的偏移量Δxb取值为-10m~10m,Δyb取值为-70m~-50m,舰艇距岸标的距离通常在15km以内。通过仿真得到方位角误差和Δxb、Δyb的关系。
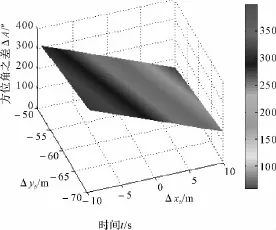
图6 方位角误差ΔA随Δxb、Δyb的变化关系
仿真结果看出,方位角误差受Δxb、Δyb的影响较大,方位角误差在100″~350″内。说明GPS与经纬仪安装位置不同会导致大地方位角解算精度下降。故一方面,在保证GPS正常使用的情况下,安装时可以考虑GPS天线靠近经纬仪安装;另一方面,需要利用误差修正模型,将GPS接收的舰位信息归化到经纬仪处,保证方位角解算精度。
5 结语
从前面的理论分析及仿真结果中,可以得出以下结论:
1)若采用的GPS水平定位精度在1m以内时,GPS天线高度和舰艇纵横摇都会对GPS定位产生较大影响,从而影响方位角解算精度,需要对定位误差进行补偿;若采用的GPS水平定位精度5m以上,在这里可以忽略两种因素的影响。
2)利用已知的GPS和电子经纬仪的相对位置,通过计算仿真可以看出,GPS与经纬仪安装位置不同会导致大地方位角解算精度下降,方位角误差在100″~350″内。需要利用误差修正模型,将GPS接收的舰位信息归化到经纬仪处,保证方位角解算精度。
[1]赵仁余.航海学[M].北京:人民交通出版社,2006,3:12-13.
[2]李恒德.在舰船处于浮态情况下进行作战系统对准[J].舰船工程研究,2000,69:15-18.
[3]王有朝.对舰艇纵横摇坐标变换的讨论[J].现代雷达,2001(3):27-30.
[4]张志远,罗国富.舰船姿态坐标变换及稳定补偿分析[J].舰船科学技术,2009,1(4):34-40.
[5]尤焜,林宇.基于多数据融合技术求解舰船航向真值[J].兵器试验,2012(3):32-35.
[6]孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,2008,12:99-105.
[7]黄谟涛,翟国君,管铮,等.空间直角坐标和大地坐标常的转换[J].解放军测绘学院学报,1998(9):164-168.
[8]王解先,刘慧芹,唐立军.不同站心地平坐标系下的坐标归算[J].工程勘察,2005(5):58-60.
[9]段晓君,姚静,周海银.发射点定位误差对发射方位角的影响[J].中国空间科学技术,2003,8(4):52-56.
[10]张卫明,张炎华,钟山.舰船GPS导航系统定位误差仿真[J].系统仿真学报,2005(1):57-59.
[11]张超,郑勇,孟凡玉,等.用GPS、电子经纬仪测天文方位角[J].信息工程大学学报,2005(6):96-99.
[12]吴铭,李鑫.摇摆运动对舰载机惯导系统传递对准精度和时间的影响的研究[J].科技广场,2009(3):9-11.