水面舰艇规避线导鱼雷方法研究*
2013-11-28李士刚陈颜辉孙振新
李士刚 陈颜辉 孙振新
(1.海军驻上海地区航天系统军事代表室 上海 201109)(2.江苏自动化研究所 连云港 222006)(3.海军92330部队 青岛 266102)
1 引言
潜射线导鱼雷具有灵活的导引方式和优异的抗干扰性能,这对水面舰艇的防御行动提出了严峻挑战。目前从介绍水面舰艇防御各种类型潜射鱼雷方法的文献可知,尽管对直航鱼雷、声自导鱼雷和尾流自导鱼雷的规避方法已有多年探讨,并已经形成了一系列比较成熟的研究结论,但关于水面舰艇对潜射线导鱼雷的纯机动规避方法方面,仍未形成一致性看法[1~4]。鉴于此,下面主要以线导+声自导鱼雷为例,从鱼雷导引规律和战场态势变化方面探讨水面舰艇的机动规避方法。
2 线导鱼雷攻击规律
关于潜艇火控系统所采取的线导导引方法,国内外学术界先后提出了有近二十余种。根据导引目的不同,可将其归纳为现在方位导引法、修正方位导引法、前置点导引法和人工导引法四类[5~6]。
现在方位导引是指潜艇在ti时刻始终将位于ti-1时刻目标方位线上的鱼雷(或自导形心)导向当前目标方位线,见图1。由于现在方位导引所要求的目标信息少、无需求解运动要素,被世界各国潜艇部队视为首选导引方法,特别对曲折机动目标而言更是唯一可行的导引方法。
修正方位导引是指在导引过程中,潜艇将鱼雷导引到偏离目标当前方位一定角度的某一方位线上,旨在避免鱼雷航行辐射噪声干扰潜艇声纳对目标的跟踪。但为避免这种偏离角造成鱼雷与目标当前方位偏距的增大,该法主要应用于导引段的前期或中前期。
前置点导引就是将鱼雷导向目标运动的预期位置点,前提是潜艇火控系统必须预先解算出目标运动要素。众所周知,水下潜艇被动解算目标运动要素收敛时间长,若水面舰艇适时采取曲折机动,更可使解算工作无法进行。因此,前置点导引应用条件较为苛刻,不具有典型意义。
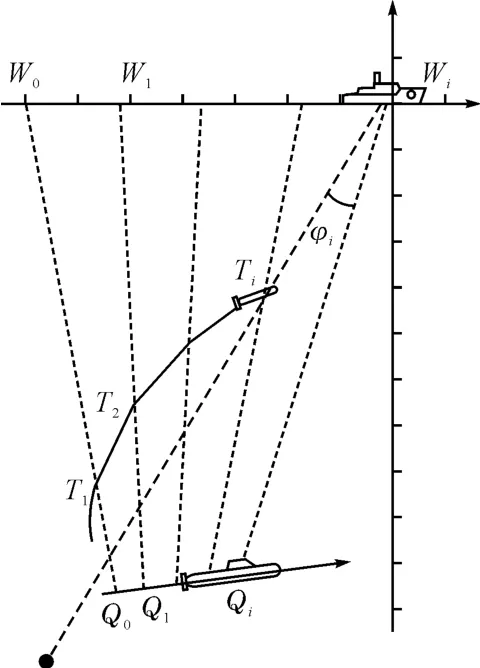
图1 现在方位导引原理示意
人工导引是将鱼雷导引至人为指定点或调整到指定航向。一般是在不宜自动导引时采用,如线导初期的偏离角修正、线导中期的导引方法转换、受干扰或诱骗时的目标选择等情形。受到人为定性判断的局限性影响,人工操作很难对鱼雷进行实时、持续的导引[7~8]。
综合分析潜射线导鱼雷攻击过程与制导原理可知,在不同攻击阶段采用的导引方法有所不同,控制鱼雷航行状态的主体也是不同的,既可能是潜艇火控系统,也可能是鱼雷本身的自导系统,还可能是艇上操作控制人员,这些控制主体可在一定条件下实现交替转换。因此研究水面舰艇规避线导鱼雷方法时,既应考虑到线导鱼雷所处的攻击阶段以及所采取的导引方法,也应考虑到不同的制导主体。
3 水面舰艇规避方法
根据制导主体的不同,线导鱼雷的一次典型攻击过程可分为两个主要阶段:发射艇导引攻击阶段和鱼雷自主攻击阶段。相应地,水面舰艇对线导鱼雷的规避机动方式也应从两种情况展开讨论,即:针对线导导引阶段鱼雷的规避和针对自导攻击阶段鱼雷的规避。
3.1 导引艇方位判断
在保持声纳跟踪的情况下,潜艇可以在极限射距上对目标发射线导鱼雷,当水面舰艇确认鱼雷报警时,来袭鱼雷往往处于线导导引的中后期,再考虑到水面舰艇航渡过程中经常采取的曲折机动,则报警时鱼雷最可能处于现在方位导引状态,其报警方位信息中也蕴含了丰富的发射艇位置信息,推断潜艇位置信息对水面舰艇选择规避方式有重要影响。
令潜艇与被攻击目标同向航行,并对鱼雷实施现在方位形心导引,导引算法采取式(1)[9],式中 Ht为鱼雷航向,Vt、Vq分别为鱼雷和潜艇速度,rtq为鱼雷自导扇面形心到发射艇的距离,βtqi、βqwi分别为ti时刻鱼雷自导扇面形心和水面舰艇相对发射艇的方位。

根据式(1)进行仿真,得到仿真态势如图2所示,利用典型仿真数据进行量化分析,可知图1中的方位偏差角φi<3°。也就是说,在实际对抗中,处于现在方位导引态势下的潜艇、鱼雷、目标舰艇三者可近似视为位于同一条方位线上。而当鱼雷自导捕获目标并转入自主攻击时,图1中的方位偏差角φi大小会发生严重畸变,此时鱼雷方位信息无法再作为水面舰艇判断导引艇精确方位的指示依据。
3.2 规避线导导引段的鱼雷
在线导鱼雷射程范围内,无论水面舰艇采取何种规避方式,只要不能摆脱敌潜艇的声纳跟踪,也就无法改变鱼雷沿着潜-舰方位不断逼近的事实。这种情况下水面舰艇实施规避机动应达到目的只能有两种选择:摆脱敌潜艇的声纳跟踪或最大程度地消耗鱼雷航程[10]。
1)摆脱敌潜艇的声纳跟踪
停车规避和驶离敌艇声纳探测范围是水面舰艇纯机动摆脱敌潜艇声纳跟踪的两种可能手段,但是在实战中,面对鱼雷来袭而采取停车规避的做法很难被指挥员所接受。因此,快速驶离敌潜艇声纳探测范围是水面舰艇摆脱其声纳跟踪的可行规避方式,根据仿真已知鱼雷报警方位近似于敌潜艇所在方位,考虑到潜艇实际导引航向的不可预测性,水面舰艇驶离敌潜艇声纳探测范围的最佳方式就是将鱼雷(潜艇)置于舰艉180°高速脱离,如图3。但能否成功走出潜艇声纳听测范围也受水文气象、装备性能等多种因素制约,因此这种方法虽可达到最快远离潜艇的目的,但也不能确保水面舰艇成功摆脱线导鱼雷的导引攻击。
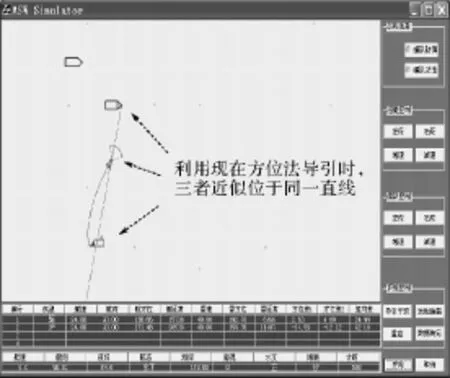
图2 现在方位法引导仿真
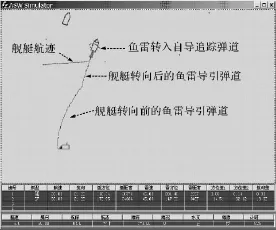
图3 线导鱼雷攻击弹道仿真示意
2)消耗鱼雷航程
水面舰艇通过纯机动规避能否成功摆脱敌潜艇声纳跟踪具有很大不确定性,然而通过纯机动规避却可以达到另一个确定性的战术意图:最大程度地消耗鱼雷航程,延缓被鱼雷捕获的时间,进而为软硬对抗的实施争取时间。
现在方位导引法所消耗的航程可近似用尾追法的航程计算式(2)表示,式中S为线导鱼雷航程,Dw、Vw、βqw分别为目标舰的距离、航速和舷角:

从式(2)不难看出,当βqw=180°时,线导鱼雷的追踪航程S最大。也就是水面舰艇转向将鱼雷置于舰艉180°舷角高速脱离时,能够达到最大程度上消耗鱼雷航程的目的。
综合分析,水面舰艇对处于线导导引阶段的鱼雷实施纯机动规避时,通过走出潜艇声纳探测范围而摆脱鱼雷攻击的可能性很小,因此应将最大程度上消耗鱼雷航程作为机动规避的主要目的。但从机动方式来看,摆脱敌潜艇声纳跟踪和消耗鱼雷航程这两种意图并不冲突,而且最佳规避路径都是将鱼雷置于舰艉180°舷角高速脱离。
3.3 规避自导追踪段的鱼雷
鱼雷依靠自身探测装置攻击误差要远远小于由潜艇通过导线导引所产生的误差,当鱼雷自导装置捕获目标时就转入自主攻击,不再依赖于潜艇的线导导引,除非受到干扰后再由人工干预恢复线导导引。因此,水面舰艇在被线导鱼雷的自导装置捕获时,其规避机动方式也应考虑到两个关键因素:鱼雷的自导攻击和可恢复的线导导引攻击。
鱼雷航速大于水面舰艇航速,一旦水面舰艇被鱼雷捕获,就很难通过纯机动规避走出鱼雷自导探测范围。在这种情况下,水面舰艇就应将消耗鱼雷航程、延缓命中时间作为规避机动的主要目的。根据式(2)可知,对处于自导追踪状态的鱼雷,不论末弹道采取的是尾追法、提前点法还是平行接近法,当水面舰艇将其置于舰艉180°高速脱离时,鱼雷只能沿舰艉方向追踪(仿真见图3),因此可最大程度上消耗鱼雷航程、延缓鱼雷命中时间。
由于线导鱼雷武器系统采用了“自控+线导+自导”的综合制导体制,若水面舰艇始终处在敌潜艇声纳探测范围内,即使在被鱼雷捕获的情况下能够摆脱鱼雷追踪,也无法避免敌潜艇重新控制鱼雷再次捕获本舰。在这种复合导引攻击态势下,水面舰艇试图通过纯机动规避同时摆脱鱼雷和潜艇双重探测的可能性几乎不存在,因此也只有延缓鱼雷命中时间并配合软硬杀伤器材的使用才会获得幸存的希望。
3.4 规避方法的实际运用
综合以上分析,无论线导鱼雷处于线导段还是自导段,水面舰艇规避机动的主要意图都应是在最大程度上消耗鱼雷航程、延缓鱼雷的命中时间,同时兼顾走出敌潜艇声纳探测范围的可能,其最佳规避方式都是迅速背敌转向,将鱼雷(潜艇)方位置于舰艉180°舷角高速脱离。这种规避方式还能充分发挥水面舰艇舰艉反射强度弱、辐射噪声小的优势,提高走出其声纳探测范围的可能性。但在实际应用中,以下几点需要明确:
1)将鱼雷置于舰艉180°舷角是理想态势下的最佳规避航向,实际中应理解为是将鱼雷置于舰艉“大舷角”的规避方向,“大舷角”的具体数值需要综合考虑舰艇转向延迟、鱼雷报警距离和报警舷角等因素并经仿真而定。
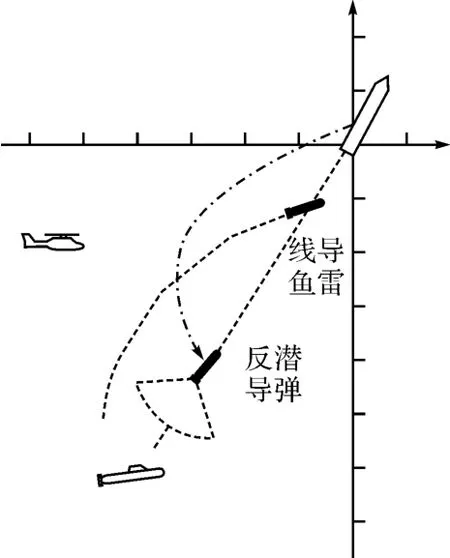
图4 发射反潜导弹对潜反击示意
2)水面舰艇纯机动规避的最可靠效果就是延缓鱼雷命中时间,但无法根除鱼雷威胁,必须配合其他软硬杀伤器材的使用才能从根本上提高生存概率。
3)前置点导引法会大大缩短鱼雷攻击航程,不利于上述规避意图的实现。因此水面舰艇在通过敌潜艇威胁区时须采取曲折机动,迫使潜艇只能以现在方位法导引鱼雷。
4)对水面舰艇而言,可根据现在方位导引法的鱼雷报警方位信息反推发射艇所在方位,从而为协同反潜兵力或反潜武器攻击提供目标方位指示(见图4)。
5)水面舰艇在高速规避过程中不应实施曲折机动,除非确认本舰已经走出潜艇声纳探测范围,否则会降低本舰相对鱼雷的逃逸速度。
还需说明的是,除非潜艇本身受到威胁,否则任何软杀伤器材以及针对鱼雷的硬杀伤器材都不足以迫使潜艇切断导线,因此适时发起对潜反击可以迫使潜艇放弃导引,降低水面舰艇所受鱼雷威胁的程度。
4 结语
防御潜射线导鱼雷涉及的实际影响因素较多,以上分析尽管采取了一些简化措施,但也揭示出了将线导鱼雷置于舰艉大舷角高速规避的重要性。在纯机动规避分析的基础上,进一步加强与软硬杀伤器材综合运用研究将对提高水面舰艇生存能力具有重要意义。
[1]林平,徐海刚.水声对抗线导鱼雷中的舰艇规避航向优化策略分析[J].军事运筹与系统工程,2007,21(1):55-58.
[2]陈颜辉.水面舰艇对抗潜射线导鱼雷攻击新策略[J].海军大连舰艇学院学报,2008,31(1):24-27.
[3]夏至军,章新华,林洪文.低频噪声干扰器对抗线导鱼雷攻击的有关问题探讨[J].哈尔滨工程大学学报,2004,25(1):46-49.
[4]沈云峰,黄文斌,陈颜辉.基于线导鱼雷导引方式的搜潜区域判定方法[J].火力与指挥控制,2010,35(10):74-77.
[5]李微波,傅调平,刘斌.现在方位导引法的线导鱼雷攻击可行域仿真[J].计算机仿真,2012,29(5):28-31.
[6]李本昌,徐世昌,李原.线导鱼雷的导引算法方法方案及使用性能[J].指挥控制与仿真,2012,34(2):5-8.
[7]李伟,邓正前,荣海洋.潜射线导鱼雷作战使用攻击决策[J].火力与指挥控制,2011,36(10):1-4.
[8]夏佩伦,李本昌.声纳丢失目标时线导鱼雷的导引方法[J].弹道学报,1998,10(4):54-58.
[9]张宇文.鱼雷弹道与弹道设计[M].西安:西北工业大学出版社,1999.
[10]袁志勇,周浩,吴茂林.鱼雷最大航向估计在反鱼雷中的应用[J].海军工程大学学报,2004,16(2):20-23.