基于双目视觉的涡轮叶片型面特征提取及匹配
2013-11-27邹丽君王婷婷
邹丽君,周 军,王婷婷
(河海大学机电工程学院,江苏 常州213022)
0 引言
涡轮叶片是一种复杂自由曲面类的零件,常用的接触法[1]测量效率较低、精度较差,无法满足当今对叶片检测精度和效率的要求。采用双目视觉系统,用投影标志物取代粘贴标志物,通过改进的SIFT[1]算子对图像进行特征提取及匹配,可以高精度、低成本的获取叶片表面均匀的点云数据。
1 双目叶片测量系统
图1为基于双目立体视觉的叶片测量系统示意图,叶片尺寸的检测需经过摄像机标定、图像采集、图像处理及变换、特征点提取及匹配和三维重构等几个阶段,其中特征点提取及匹配精度直接影响到叶片表面点的实际三维坐标值,准确有效的特征点提取及匹配,对最终的检测结果至关重要。双目视觉系统中两台摄像机的镜头中心距离叶片表面的各个部分距离不同,拍摄出来的图片中叶片表面在摄像机中成的像会有大小、尺度的变化。为了提高特征点提取数量及匹配精度,采用SIFT算法对图像进行特征点提取及匹配。SIFT算子提取的特征点比较稳定,具有抗尺度变化和光照变化的能力,非常适用于局部目标匹配、图像拼接[2]等。
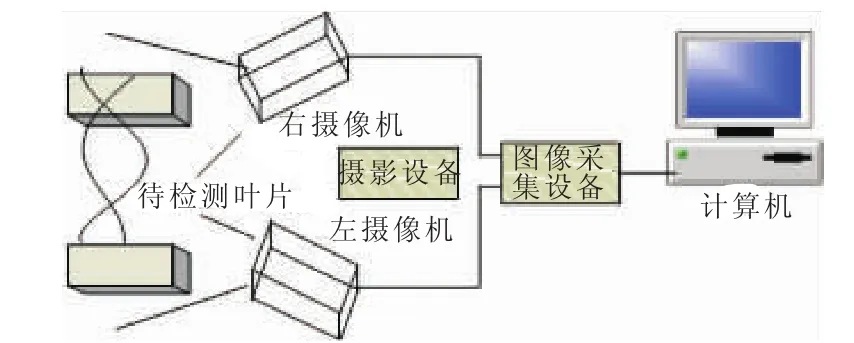
图1 双目叶片测量系统
2 特征提取及匹配
David Lowe提出了SIFT算法,对图像之间发生的平移、旋转、尺度及光照变化具有不变性。SIFT特征匹配算法包括2个阶段:第1阶段是SIFT特征的生成;第2阶段是SIFT特征向量的匹配。SIFT的特征提取及匹配关键为以下几个。
2.1 优化尺度空间
建立一个图像的尺度空间,先定义一个图像的尺度函数L(x,y,σ),将原始图像Ⅰ(x,y)与一个可变尺度的2维高斯函数G(x,y,σ)进行卷积运算。高斯核函数定义为:

特征尺度σ的大小决定图像的模糊程度,尺度越大图像越模糊。将相邻尺度高斯平滑后的图像相减,优化尺度空间,获得差分高斯金字塔。
2.2 特征描述子生成
SIFT特征描述子具有大小和方向两个特性,每一个极值点(x,y)的大小和方向由高斯窗内的所有像素点的梯度幅值m(x,y)和方向θ(x,y)决定,即

这样生成的每个关键点都包含了位置、大小和方向3个信息,形成的描述子就是一组对于尺度缩放、旋转、亮度变化无关特征向量。
2.3 SIFT算子高维、高效匹配
SIFT算子提取出的特征点是具有128维特征的向量,采用关键点特征向量的欧氏距离进行两幅图像的匹配,两个特征向量a(x11,x12,…,x1n)与b(x21,x22,…,x2n)之间的欧氏距离:

为了解决高维矢量的匹配率问题,SIFT算子将特征描述向量建立Kd-树索引,并且加入BBF优先级查询机制,通过这个索引找出关键点的最近和次近点,来进行高效匹配。
3 改进SIFT算法
目前已有一些参考文献[3-5]分别从简化SIFT特征描述符来降低匹配速率和剔除误匹配点来提高匹配精度两个方面对SIFT算法进行改进。为了提高匹配精度,针对双目视觉左右摄像机拍摄出图像发生旋转的角度及左右两幅图片正确的特征点相对位置,提出了一种窄基线伪匹配点剔除法。首先,建立存储匹配特征点对的序列,每进行一次特征点匹配,计算匹配特征点对的纵坐标差的绝对值,将其与设定范围值进行比较,将在此范围值内的特征点对存储到序列中,然后搜寻特征点序列,判断该匹配点对的左右特征点在该序列中的存储情况,如图2所示。由于不能确定一对多匹配点对中的正确匹配点对,从匹配点数据发现,存在一对多匹配现象的匹配点数量并不多,将其全部剔除,对叶片表面特征点匹配影响不大,但是可以大大提高匹配精度。而对于重复匹配的特征点对,仅剔除当前匹配的特征点对。
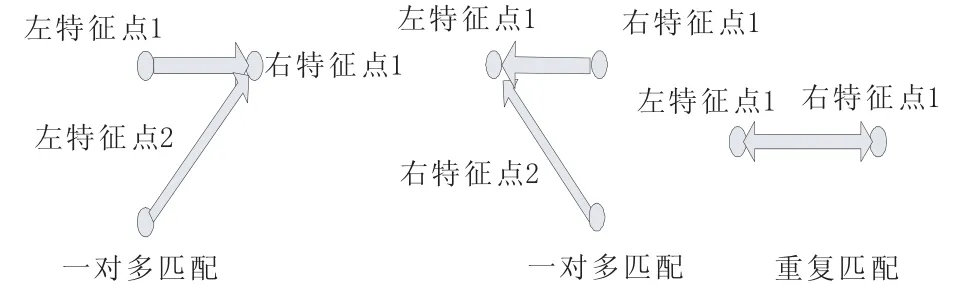
图2 特征点一对多、重复匹配
通过剔除伪匹配点对,可以大大提高SIFT算法匹配精度。
第1步,对检测出来的左图像的特征点集P1(n1,n2,n3,…}进行 K-d树建立,并依次循环检测右图像的特征点集Pr(m1,m2,m3,…}。
第2步,提取第i个特征点对{ni,mi}的纵坐标{Yni,Ymi}并求取其差值的绝对值abs(Li)=abs(Ymi-Yni)。通过实验发现,当令abs(Li)的值固定在[0,k]范围之间时,能够剔除大部分的误匹配点,保留更多的正确匹配点。
第3步,将保留下来的特征点对存储到序列A中,并判断该特征点在序列A中是否存在以下3种情况:
a.当(Xni,Yni)=[Xn(i+s),Yn(i+s)]时,(s=1,2,…)说明左图中两个及两个以上特征点与右图中一个特征点发生一配多现象,此时将这些匹配点对一一进行剔除,保证精确度。
b.当(Xmi,Ymi)=[Xm(i+s),Ym(i+s)]时,(s=1,2,…)说明右图中两个及两个以上特征点与左图中一个特征点发生一配多现象,同上述步骤a进行处理。
c.当(Xmi,Ymi)=[Xm(i+s),Ym(i+s)]且(Xni,Yni)=[Xn(i+s),Yn(i+s)]时,左右特征点重复匹配,只剔除当前匹配特征点对,保留一对匹配点对。
4 系统实现及实验
基于双目视觉的涡轮叶片测量系统如图3所示,系统主要由CCD摄像机、特征投射器、步进电机和视频采集系统等构成。将双目摄像机拍摄的图片进行实验,验证所提出方法的有效性。为了在无明显特征的叶片表面能够获取叶片上均匀的特征点,针对SIFT算法对具有明显特征区别的图片处理效果很理想的情况下,采用的投影特征是均匀排列的文字图片,能够获得更多的特征匹配点,有利于后期对叶片的三维重建。在图4和图5中,圆圈为检测出来的特征点对,这些特征点对通过实线段连接,虚线包围的是提取叶片表面特征点区域。
图3 实验测试系统
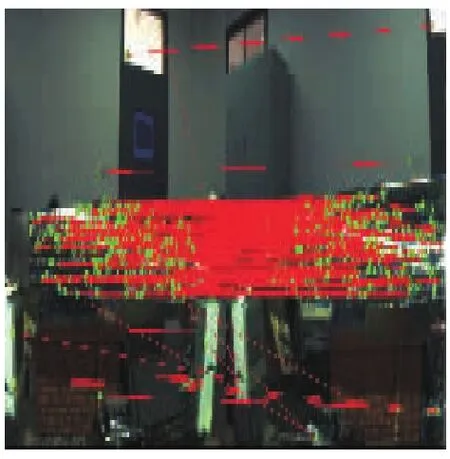
图4 原SIFT算法

图5 本文算法
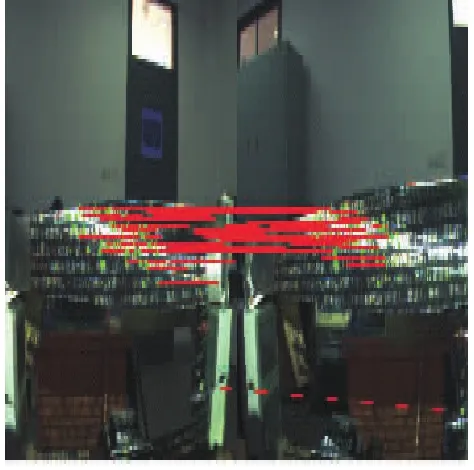
图6 Harris角点匹配
图4 给出原始SIFT算法的匹配结果,可见大量的匹配点被提取出来,然而,其中也存在较多的误匹配点,这将影响算法的匹配精度,因此,在原算法的基础上进一步加入伪匹配点对剔除算法。如图5所示,在不影响正确匹配点对的前提下,通过提出的窄基线伪匹配点剔除法,将大部分伪匹配、重复匹配及一对多匹配点对剔除,提高匹配精确度。为了进一步验证方法的性能,将图像特征检测及匹配中常用的Harris[6]角点提取及匹配算法与本文提出的方法进行试验对比。图6给出Harris角点匹配加RANSAC提纯结果,可以看出,图6正确匹配的特征点对数明显少于图5正确匹配的特征点对数,且相对集中于左右两幅图片的中间部分。这是由于双目视觉左右图像在距离图像中心越远的地方,其旋转、光照及尺度的变化越严重,而Harris算子在旋转时稳定性、定位较差,且不具备尺度不变性,在这种情况下,SIFT特征提取匹配算法比Harris角点提取及匹配算法处理效果更好。为了更加直观地显示本文提出的改进算法的效果,在表1中列出了3种方法的实验数据对比,原算法的匹配精度不及改进算法精度,Harris匹配算法加入RANSAC提纯后,虽然精度达到100%,但其匹配点对数量远远小于改进算法,无法达到检测叶片所需特征点数量的要求。
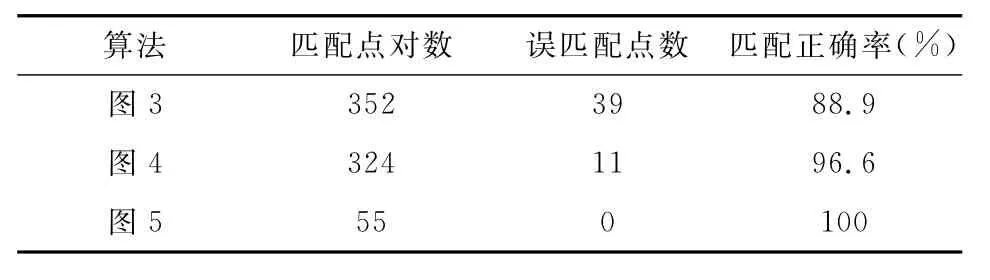
表1 原算法与改进后、及Harris算法结果对比
5 结束语
采用基于SIFT算子的双目视觉特征提取及匹配技术对涡轮叶片型面进行检测,获取涡轮叶片的点云数据,实验表明,该方法能够准确、低成本解决涡轮叶片型面点云数据的提取问题。
[1] Lowe David G.Distinctive image features from scaleinvariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[2] 张春美.特征点提取及其在图像匹配中的应用研究[D].郑州:解放军信息工程大学,2008.
[3] 张东兴,祝明波,邹建武,等.基于相似三角形的SIFT错误匹配点剔除算法研究[J].计算机工程与科学,2012,34(4):66-70.
[4] 程 红,陈文剑.基于SIFT算法的图像匹配剔点方法研究[J].地理与地理信息科学,2012,(11):17-19.
[5] 刘 立,彭复员,赵 坤,等.采用简化SIFT算法实现快速图像匹配[J].红外与激光工程,2008,37(1):181-184.
[6] Harris C,Stephens M.A combined corner and edge detector[A].Alvey Vision Conference[C].1988.147-151.
