基于杆件柔性的舱门机构动力学特性影响分析
2013-11-27万方义
秦 增,万方义
(西北工业大学航空学院,陕西 西安710072)
0 引言
现代飞机对机构运动性能的要求越来越高,其运动性能的好坏将直接决定飞机能否完成预定的任务。某公司B-6007飞机出现前起落架舱门无法正常打开[1]。直-九武XXX号机“C”检工作中,发现左、右舱门出现松动、下沉现象[2]。所研究的某型飞机舱门机构,由于开闭过程中受到时变的外部载荷和自身较强的惯性载荷共同作用,极易产生变形和振动。在舱门设计和使用过程中,考虑杆件柔性对舱门机构性能的影响非常必要。关于含柔性杆件运动机构的动力学分析,很多学者做过研究。张策在Kane的基础上对含有柔性杆的平面4连杆进行了动力学分析[3];章定国对大范围运动的刚体柔性梁刚柔耦合进行了动力学分析[4];潘云基于谱方法对刚柔耦合机械手模型进行了降维处理[5];周李成提出了一种4连杆机构可靠性数值模拟及试验的研究方法[6];李为通过动力学软件分析了舱门打开过程的动力学响应[7];刘锦阳实现了柔性杆的刚柔耦合的动力学分析[8];冯琳娜应用LMS软件对杆件疲劳对机构性能的影响进行了分析[9]等。但目前多数研究是针对柔性杆件单独构建局部的柔性模型,将柔性杆嵌入机构中,对机构整体进行建模的研究相对较少,而针对含柔性杆的舱门机构的研究就更少。将含有柔性杆的舱门机构看作一个整体进行动力学建模,分析局部柔性杆件对整个机构特性和运动精度的影响。
1 某舱门机构的数学模型
整个舱门机构是由2个并联6连杆机构带动舱门板及其附属结构一起运动,进而实现舱门的开闭运动。实际模型图如图1所示。每一侧的平面6连杆机构由2个串联的平面4连杆机构组成,如图2所示。图2只能看到一侧的平面6连杆机构,另外一个被完全覆盖。2个4连杆机构运动规律一致,运动原理相似,将含有大舱门的平面4连杆机构作为基本的分析单元。
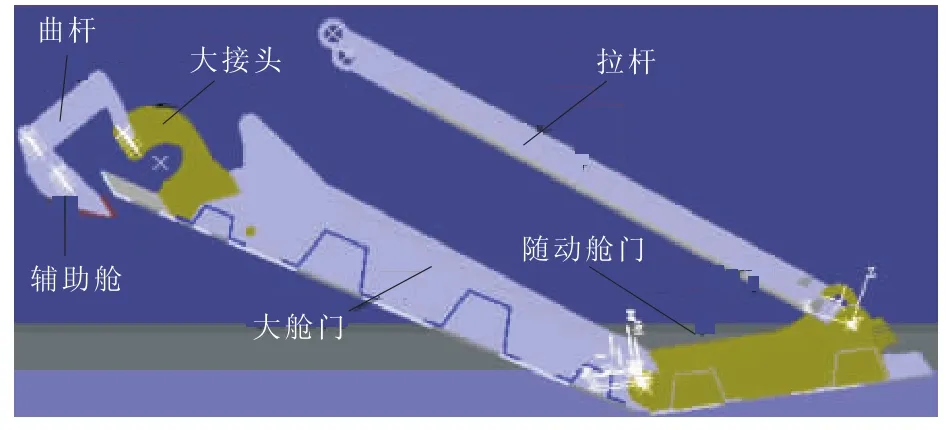
图1 某舱门机构数字模型侧向视图
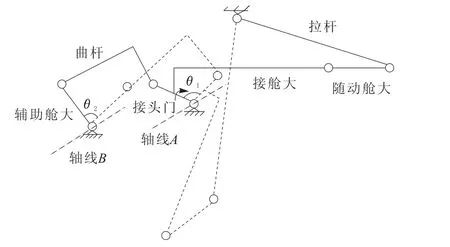
图2 舱门机构
相比于舱门机构的曲杆和拉杆。舱门机构本身的重量较大,结构较为坚固,可视为刚性构件处理。曲杆和拉杆长度较长,且横截面较小,受到载荷时较易产生变形,视作柔性杆处理。由于投弹任务是由大舱门完成,主要分析含有大舱门的4连杆机构。
建立含有柔性杆的4连杆机构的动力学模型主要包括3个方面,求取全刚体舱门机构的等效转动惯量;确定柔性杆的形函数,并计算柔性杆变形运动的等效刚度,等效质量和等效载荷,用拉格朗日方程建立含柔性杆的4连杆机构的动力学分析模型。
2 舱门机构的等效转动惯量
不考虑柔性杆影响时,舱门运动机构仅有一个自由度,曲秀全等研究了通过能量法计算其等效转动惯量的方法[10]。含大舱门的平面4连杆机构简图如图3所示。任意点的运动都是杆L1转角θ1的函数。所以,平面4连杆机构的动能表示成θ1的函数。机构平面运动的动能由两部分组成:一部分为杆件平动动能;另一部分是杆件绕质心转动的动能。

图3 典型四连杆机构标注
2.1 舱门机构的平动动能
令向量θ=[θ1θ2θ3],˙θ=[θ1θ2θ3],构件L1为转动原动件,设其角位移θ1为广义坐标。其他2个角位移θ2和θ3均可表示成广义坐标θ1的函数。杆件的动能可表示为转角θ的函数:

根据位置关系,计算角位移之间的关系为:
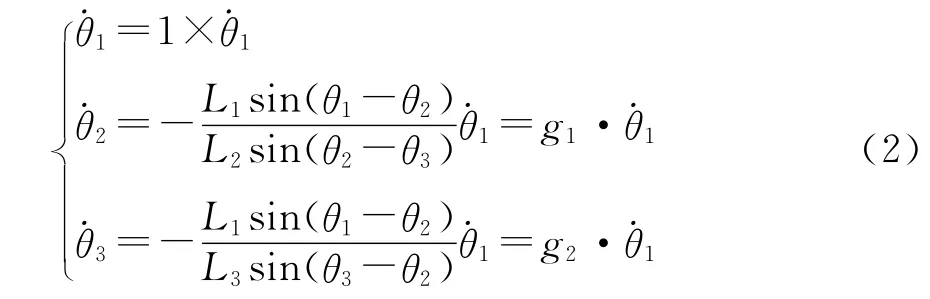
令g=[1 g1g2]可得平动动能方程:

2.2 舱门机构的转动动能
由于舱门机构的运动均用角位移θ1,θ2和θ3表示,设3个杆件的转动惯量为J1,J2和J3。

则转动动能为:

舱门机构的总动能为:

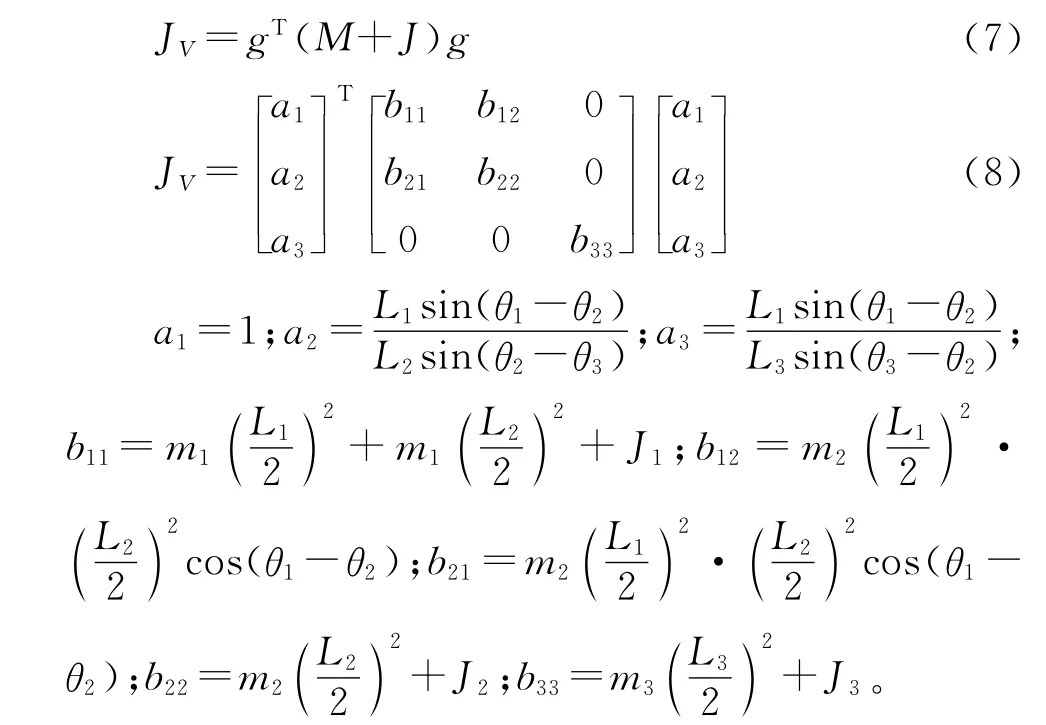
2.3 舱门机构的等效转动惯量公式
舱门机构动能为:

令等效转动惯量为:
上式中所有参数均为转角θ1的函数,可表示为函数JV=JV(θ1),如图4所示。转动惯量是周期性变化的,在π的整数倍处较大,因为在π的整数倍处4根杆几乎在一条线上,相当于杆件长度较长,而质量不变,转动惯量相对较大。对于舱门机构仅计算其开闭范围(1.2~2.3 rad)的转动惯量即可。
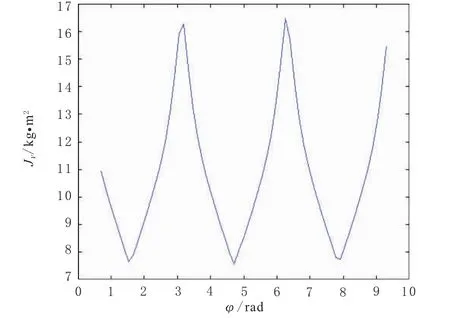
图4 舱门机构等效转动惯量曲线
3 舱门机构柔性杆的分析
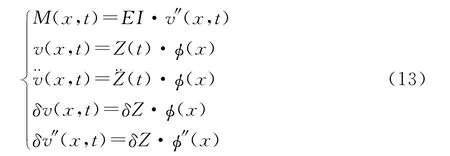
舱门机构的柔性杆可以弯曲变形,产生无穷多个自由度。但是,如果假设柔性杆仅能产生单一弯曲变形形式,那么柔性杆仍可作为一个单自由度体系来分析。这样整个舱门机构也就简化为仅有两个自由度。下面将要讨论如何将一个具有无穷多个自由度的柔性杆简化为具有单一弯曲变形形式的柔性杆。记柔性杆变形的形状函数为φ(x),柔性杆末端变形挠度Z(t)作为广义坐标,柔性杆任意点挠度为v(x,t)=Z(t)·φ(x)[11]。
3.1 舱门机构柔性拉杆的形状函数
当杆件受到驱动力矩运动时,根据达朗贝尔原理,驱动力矩和惯性力构成平衡体系,可以将其等效成悬臂梁结构,受力分析如图5所示。用悬臂梁结构的形函数近似柔性拉杆结构的形函数。
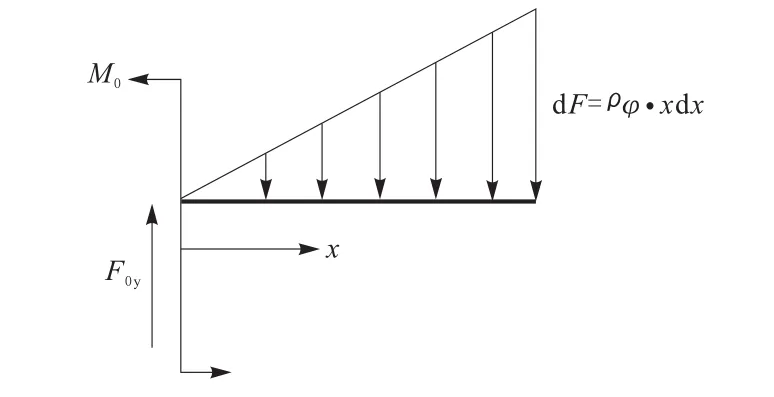
图5 柔性杆受力
设绕定轴转动长为l的杆件转过角度为θ,水平向右为起始方向,逆时针方向为正。将杆件离散化为无数个小单元,每个小单元受到的惯性力为d F=ρ·d x·x·¨θ。通过积分计算可得整个杆件受到弯矩M0,外载荷F0y和杆件上x处受到的弯矩M(x)根据材料力学弯矩公式EⅠ·v″=M(x)[12],推导得悬臂梁挠曲线方程为:


3.2 基于虚功原理建立柔性杆的运动方程
根据虚功原理,外力在相应虚位移上所做的功等于它的内力在相应虚位移上产生的虚功δWE=δWⅠ。根据达朗贝尔原理,外力虚功由惯性力虚功和外载荷虚功组成:

内力虚功和杆件形变有直接关系为:

整理得柔性杆弯曲运动方程为:

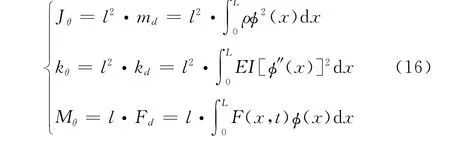
Z(t)为杆件末端弯曲变形,即挠度;md为广义质量;kd为广义弯曲刚度和Fd为广义外力。以柔性杆末端点变形转角Zθ(t)作为广义坐标。将材料力学中变形转角和挠度的关系带入式(14)并乘以杆长l得:

至此,在假设杆件只有惟一变形形式的前提下,推导出了和柔性杆变形有关的广义转动惯量,广义弯曲刚度和广义弯矩为:
4 含柔性杆舱门机构的动力学模型
通过上2节的分析和假设可知,含有柔性杆的舱门机构含有两个自由度。一个是舱门刚性运动的自由度,用拉杆转角θ1表示;另一个是柔性杆产生惟一形式的变形运动,用θ2表示柔性拉杆末端的转角,|θ1-θ2|表示柔性杆的弯曲程度。舱门机构数据L1=737 mm,L2=277.9 mm,L3=675.036 mm,X=277.838 mm;柔性拉杆半径r1=20 mm,大舱门和随动舱门厚度h2=h3=30 mm,宽度d2=d3=300 mm,材料弹性模量E=70 000 MPa,密度ρ=2 710 kg/m3。将以上数据带入式(8),可以得到舱门机构的等效转动惯量JV,广义转动惯量Jθ和广义弯曲刚度kθ。
用拉格朗日方程建立含柔性杆舱门机构的动力学方程,需要知道机构的动能和势能。机构动能分两部分:一部分是舱门刚体运动动能另一部分是柔性杆弹性振动的动能总动能为:

在势能方面,将重力视为外力处理,储备的势能就只有杆件变形的弹性势能。其计算公式为:

带入拉格朗日方程,得:

如果将动能和势能直接代入拉格朗日方程,由于杆件刚性转动惯量JV为转角θ1的函数,导致所求微分方程组为非线性方程组。为解决此问题,将动力学模型按照时间离散化,在每一个小的时间范围内可以将转动惯量JV视为常数,和柔性杆固有属性有关的广义转动惯量Jθ和广义弯曲刚度本身就为常数。这样在每一个小时间单元内,可得线性微分方程组为:
求解此微分方程可得杆件在此小时间单元末尾的角位移和角速度,作为下一时刻的初始条件。利用Matlab编制一个循环程序,可以计算得到舱门的动力学响应。至此,含柔性杆舱门机构的动力学模型建立完成,下节将利用此模型计算不同损伤程度下舱门机构的动力学响应。
5 柔性杆损伤对舱门机构性能的影响
飞机使用难以避免产生各种形式损伤,例如受到海洋性潮湿环境的影响,易产生腐蚀损伤,频繁地开闭舱门易产生疲劳累计损伤等[13]。随着损伤程度的不同,柔性杆的属性也会发生变化,弹性模量E会随着损伤程度的加深而逐渐减小[14]。由广义弯曲刚度计算公式可知,广义弯曲刚度k和弹性模量E成正比,计算当刚度系数k发生变化时,柔性杆损伤对舱门机构动力学性能的影响。
图6是其他条件不变,刚度系数k依次减小时,舱门机构的角位移图和角速度图。k=1 000时认为杆件处于健康状态,两条曲线几乎完全重合,随着杆件损伤程度的增加,刚度系数k的剧烈减小,k=100时角位移曲线波动很小,表明柔性杆故障早期的征兆并不明显,柔性杆对舱门机构动力学响应的影响逐渐增加,当刚度系数k低于临界值后,可以认定杆件出现严重故障,比如严重腐蚀、严重裂纹,这时舱门机构的运动精度明显减小且振动幅值显著增大,损伤引起的后果非常严重,这与工程经验相吻合。根据模型,可建立舱门拉杆损伤程度与舱门动力学响应之间的关系。在工程应用中,可通过传感器获得的舱门机构动力学响应数据推测舱门拉杆的损伤程度,也可以根据舱门拉杆的损伤状况估计舱门机构的动力学性能。

图6 刚度系数k不同时,柔性连杆起始端和末端的转角及角速度比较
6 结束语
提出一种刚柔耦合建模的新方法。将柔性杆简化,计算机构整体等效转动惯量,最终建立机构的拉格朗日动力学方程。模型计算结果表明,当舱门机构处于健康状态时,柔性杆对舱门动力学特性影响很小。但随着舱门连杆损伤程度的加深,柔性拉杆的弹性模量和弯曲刚度随之减小,舱门机构的运动精度将会逐渐下降,局部振动越发明显,最终将导致舱门机构失效。这与工程经验相吻合。舱门机构动力学模型搭建了舱门机构动力学响应和柔性拉杆损伤程度之间联系。计算结果为分析多种故障模式下舱门机构的性能退化规律打下基础,为舱门机构故障诊断和健康管理研究提供理论参考。
[1] 周明波.从前起落架舱门故障看A320起落架系统安全活门的作用[J].中国民航飞行学院学报,2006,(4):22-24.
[2] 程 佳,蔡兴佳,朱俊红.直-九武直升机14°框和前舱门故障修理[A].第21届全国直升机年会论文[C].2005.
[3] Kane T R,Ryan R R ,Banerjee A K.Dynamics of a cantilever beam attached to a moving base[J].Journal of Guidance,1987,10(2):139-151.
[4] 章定国,周胜丰.柔性杆柔性铰机器人动力学分析[J].应用数学和力学,2006,(5):615-623.
[5] 潘 云.基于谱方法的刚柔机械手模型降维与控制研究[D].长沙:中南大学,2011.
[6] 周李成.4连杆机构可靠性数值模拟及试验技术方法研究[D].北京:北京工业大学,2010.
[7] 李 为.弹舱结构的动力学建模及动响应分析[D].南京:南京航空航天大学,2009.
[8] 刘锦阳,洪嘉振.柔性体的刚-柔耦合动力学分析[J].固体力学学报,2002,(6):159-165.
[9] 冯琳娜.基于LMS的舱门机构中曲杆的疲劳寿命仿真分析[J].机械与电子,2010,(6):21-25.
[10] 曲秀全,焦映厚,陈照波,等.单自由度平面连杆机构等效转动惯量计算公式[J].哈尔滨工业大学学报,2004,(5):610-612.
[11] R.克拉夫,J彭津.结构动力学[M].王光远,等译校.北京:高等教育出版社,2006.
[12] 刘鸿文.材料力学[M].北京:高等教育出版社,2006.
[13] Gordon J Savage,Turuna.Seecharan,Young Kap Son.Probability-based prediction of degrading dynamic system[J].Journal of Mechanical Design,2013,(3):1-4.
[14] 张亚军,李永军,张利娟.低周疲劳过程中弹性模量的损伤特性[J].材料开发与应用,2010,(2):19-22.
