快速公交信号优先对交通流影响仿真
2013-11-26杨远舟毛保华陈绍宽刘明君
杨远舟,毛保华,陈绍宽,刘 爽,刘明君
1)交通运输部科学研究院城市交通研究中心,北京100013;2)北京交通大学交通运输学院,北京100044;3)国家发展和改革委员会综合运输研究所,北京100038
交叉口信号优先是快速公交 (bus rapid transit,BRT)快速、准点运行的可靠保障[1],但难免会对社会车流产生影响.过度损失社会车流绿灯时间实现BRT优先,将造成社会车流的拥堵,但BRT信号优先时间过短,则难以达到公交优先的效果.因此,研究如何设置BRT优先信号,从而实现BRT和社会车辆双赢,成为相关学者关注的热点[2-7].由于交通流的随机性,难以用精确的数学模型描述.目前更多的是通过模拟仿真方法进行研究,刘道君[8]基于Vissim对快速公交信号优先策略效果进行了模拟,分析了不同信号优先策略对交叉口交通流的影响;元胞自动机模型有良好的解释交通现象的能力,近年来受到研究者的青睐;彭麟等[9]采用多速元胞自动机交通流模型,研究主干道上车站设置、信号灯绿信比对车流量和车流速度的影响;李盛春等[10]采用改进的NaSch模型分析智能信号灯对十字交叉路口交通流的影响,并指出智能信号灯控制下的主干道车辆平均速度和流量都比普通信号灯控制下要高.以上研究主要探讨信号绿信比、周期等对一般交叉口交通流的影响,未考虑含专用道的BRT实施信号优先对交叉口交通流的影响.本研究在开放边界条件下,以元胞自动机模型为基础,探讨BRT信号优先对交叉口交通流的影响,为合理设置BRT信号优先提供依据.
1 模型
BRT主动信号优先的控制策略主要为绿灯延长和红灯早断两种[11],通过设置BRT信号优先检测器来实现.假设BRT信号优先检测器a、b离路口停车线的距离均为L,BRT在两处的速度均为VBRT,则BRT到达停车线时间t=L/VBRT,如图1.BRT到达a或b时,BRT信号灯显示绿灯或红灯.若显示绿灯且绿灯剩余时间g'BRT≤t,则需延长g'BRT,使BRT通过;若显示红灯且红灯剩余时间r'BRT≥t,则需缩短r'BRT,使BRT尽快通过.剩余时间是指BRT车辆到达检测器时,BRT当前显示的信号距离该信号变换的间隔时间.
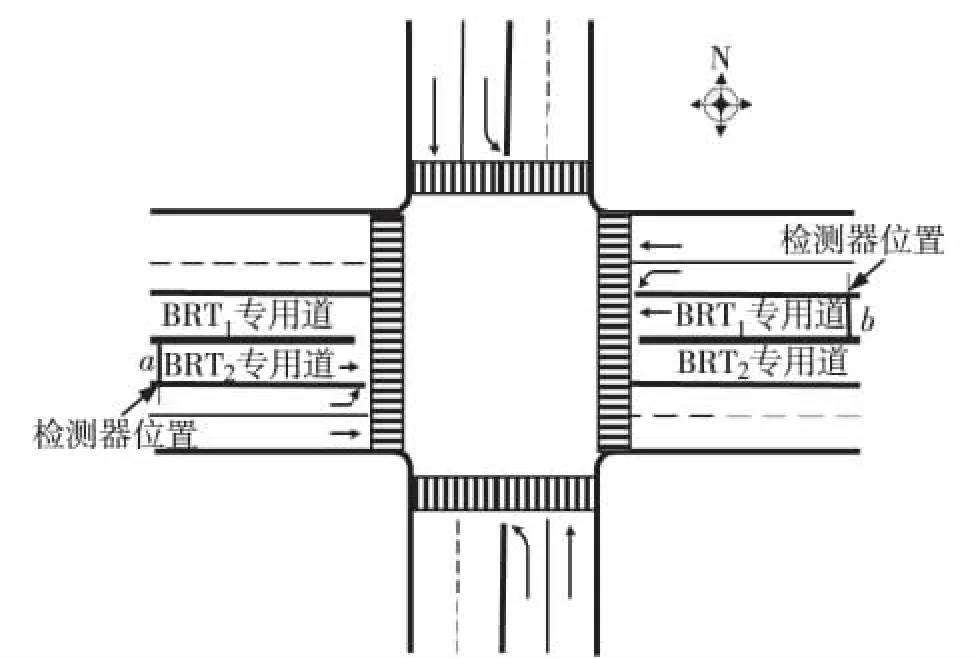
图1 仿真交叉口的渠化情况Fig.1 Drainage of the Simulation Intersection
仿真交叉口的信号配时如图2,gi(i=1,2,3,4)和gBRT分别表示第i相位的绿灯时间和BRT车道的绿灯时间,BRT和东西方向直行的社会车流同为第2相位.BRT绿灯延长信号优先是通过减少g3和g4,使BRT相位的绿灯显示时间延长;BRT红灯早断信号优先是通过减少g1,使BRT相位的绿灯提前显示.
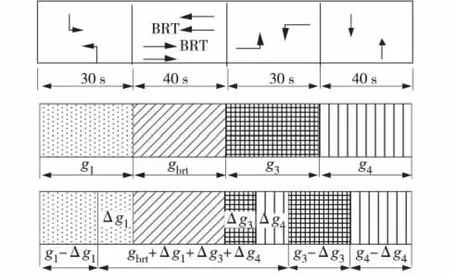
图2 仿真交叉口的信号配时Fig.2 Signal timing of the Simulation Intersection
BRT绿灯延长时长ΔgBRT=Δg3+Δg4,且假设ΔgBRT由BRT相位的后续两个连续相位来均分,即Δg3=Δg4;BRT红灯早断时长ΔrBRT等于BRT前一个相位的绿灯时间减少时间Δg1,即ΔrBRT=Δg1.因此,BRT因信号优先控制增加的绿灯时间为ΔgBRT+ΔrBRT.由于右转车流不受交叉口信号控制,本文暂不考虑右转车流.
1.1 元胞自动机模型
在开放边界条件下,BRT信号仿真采用VDR模型.设车辆每次更新前确定慢化概率为p,有
if Vj,i(t)=0,则 p=p0
else if Vj,i(t)> 0,则 p=p1
其中,p0>p1;p0对应于遵循慢启动规则的车辆;p1对应于不遵循慢启动规则的车辆.
加速时有

减速时有

随机慢化时有

车辆位置更新时有

其中,Xj,i(t)和Vj,i(t)分别表示j车道上第 i辆车 t时刻的位置和速度;Vj,max表示j车道上车辆的最大速度;式(1)和式(3)的速度增加或减少1,表示增加或减少一个单位速度;gapj,i(t)=Xj,i+1(t)-Xj,i(t)-li+1,表示j车道上第i辆车在t时刻与前车i+1的间距 (空元胞格数);li+1表示前车i+1的车长.仿真步长Δt=1 s;车辆在交叉口遇到红灯时,需停车等待.
else进入下一步长运行.
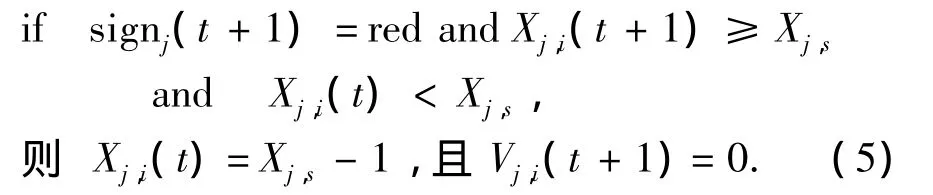
其中,Xj,s表示停车线的位置;signj(t)表示j车道t时刻信号.当下一时刻信号为红灯时,临近交叉口的车辆需要在进口车道停车线处等待.
if信号为绿灯时,则signj(t)=green;
else if信号为红灯时,则signj(t)=red.
1.2 快速公交信号优先模型
交叉口的信号周期由T个时步组成,T=greenj+redj;greenj和redj分别表示第j车道在一个信号周期的绿灯和红灯时长;XBRT,s表示BRT车道的进口道停车线的位置;BRT信号优先检测器的位置为XBRT,t,即其距离交叉口的长度 L=XBRT,s- XBRT,t.
当第i辆BRT在t时刻到达a或b时信号为绿灯(图2东西方向直行相位),即signBRT(t)=green,计算该方向的绿灯剩余时间g'BRT,j;为BRT信号最大允许绿灯延长时间,称为最大绿灯延长时间.
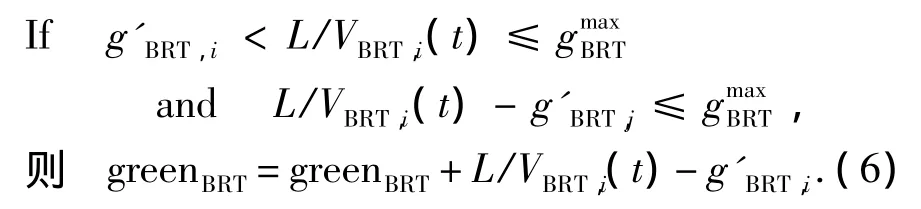
else BRT信号不做绿灯延长.
当第i辆BRT在t时刻到达a或b时信号为红灯,即signBRT(t)=red,计算该方向的红灯剩余时间r'BRT,i,rmaxBRT表示BRT信号最大红灯允许早断时间,即最大红灯早断时间.
else BRT信号不做红灯早断.
结合两种策略,讨论图1中BRT1和BRT2车道上同时满足信号优先的处理过程:
1)两条BRT车道均需绿灯延长.t时刻,BRT1车道上第m辆车到达b处时,绿灯延长时间ΔgBRT1需为 L/VBRT1,m(t)- gBRT1,m,BRT2车道上第 n 辆车到达b时,绿灯延长时间 ΔgBRT2需为 L/VBRT2,n(t)-g'BRT2,n,且ΔgBRT1(ΔgBRT2)<,则该周期BRT绿灯信号调整为

2)两条BRT车道均需红灯早断.t时刻,BRT1车道上第m辆车到达b处时,红灯早断时间ΔrBRT1需为 r'BRT1,m- L/VBRT1,m(t),BRT2车道上第 n 辆车到达a处时,红灯早断时间 ΔrBRT2需为 r'BRT2,n-L/VBRT2,n(t),且 ΔrBRT1(ΔrBRT2) < rmaxBRT,则该周期BRT红灯信号调整为

2 数值模拟
其中,N(t)表示t时刻交叉口所有车道上车辆的总数;Nj(t)表示j车道t时刻的车辆总数;N(t)=为观察交叉口进口道的长度,即模拟指标统计的是停车线前Lview个元胞长的路段;n为车道数.
车道 j(j=1,2,…,BRT)的车流密度 ρj(t)、平均速度(t)和流量 fj(t)[12]分别为
本研究以某市快速公交1号线和义农场站交叉口为背景,仿真了BRT绿灯延长和红灯早断两种信号优先控制策略下的交通运行特征.仿真交叉口基本情况、信号配时和仿真流程图分别见图1和图2.
为简便起见,仿真中假设:① 许多普通公交线路因BRT建设相继取消,假设社会车道没有普通公交,仅有小汽车;② 各车道车辆运行不考虑换道行为.以上假设仅影响仿真值,对仿真结果的变化趋势影响小,能反映信号优先对交通流的影响.
仿真中部分参数取值如下:一个元胞所对应的实际道路长度为3.75 m,每个时间步长Δt=1 s;模拟中,为减少车流产生对模拟结果的影响,每条道路的车流产生点距离停车线为1 000个元胞,而Lview=100个元胞;车长l(当为小汽车时,长度占据2个元胞,l=2;当为BRT车辆时,l=6,长度占据6个元胞);随机慢化概率p=0.13;社会车辆在交叉口和行车道上具有相同的最大速度Vmaxs=3,则对应的实际车速为40.5 km/h;BRT车辆在交叉口和行车道上具有相同的最大速度,则对应的实际车速为27 km/h,演化时步取为50 000步,从30 000步开始取数据进行统计,即对后τ=20 000的值作统计平均,则

2.1 信号优先参数的影响
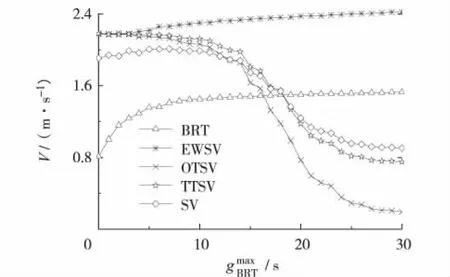
图3 速度随BRT最大绿灯延长时间的变化Fig.3 Velocity with the greatest green-light-extended time of BRT
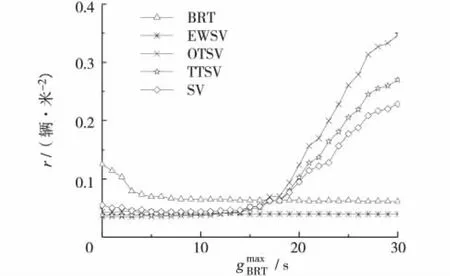
图4 密度随BRT最大绿灯延长时间的变化Fig.4 Density with the greatest green-light-extended time of BRT
考虑到BRT信号优先的绿灯延长时间的收益率和社会车辆的运行效率的受损率随着的增大而发生变化,为提高BRT在交叉口的运行效率,并减少对社会车流的影响,在设置BRT绿灯延长信号优先时,需合理设置.根据模拟结果,BRT最大绿灯延长时间<9 s比较合适.
图5和图6分别显示速度和密度随BRT最大红灯早断时间的变化情况.从图5和图6可见,BRT和EWSV的速度曲线逐步升高,密度曲线逐步降低,而SV速度曲线缓慢上升,然后逐步下降.当≤5 s时,社会车流平均速度受BRT信号优先的影响小,BRT因信号优先而平均速度明显增加,因此,系统的总车辆运行速度提高;当5 s<≤14 s时,由于社会车流 (不包含东西直行方向)绿灯时间的逐步减少,使社会车流在交叉口的停车次数增加,等待时间增多,社会车流的平均速度急剧下降,车流密度急剧上升,导致增大的BRT运行效率未能抵消社会车流运行效率的受损,使系统的总车辆运行速度逐渐降低;当>14 s时,由于社会车辆的绿灯时间损失过多,部分社会车辆行驶缓慢.因此,为减少BRT红灯早断信号优先对社会车流的影响,需要设置在一个合适的范围内.从模拟结果看,<5 s比较合适.
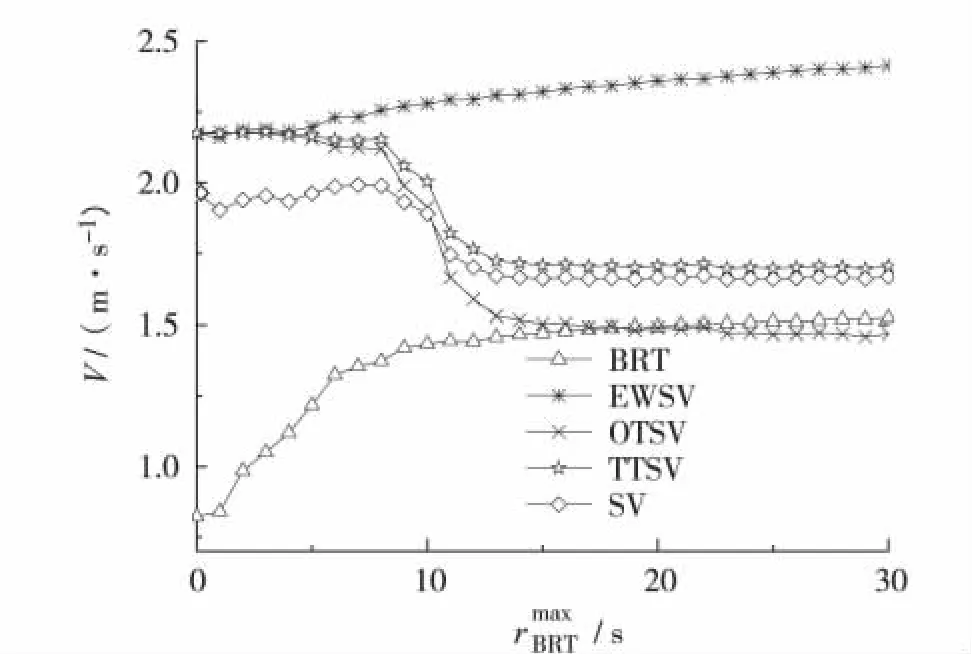
图5 速度随BRT最大红灯早断时间rmaxBRT的变化Fig.5 Velocity with the greatest red-light-off time of BRT
比较图3和图5可见,BRT信号优先的绿灯延长和红灯早断策略导致社会车辆行驶缓慢的时间分别在22 s和14 s,说明红灯早断时间对社会车流速度和密度的变化影响大,主要原因是BRT红灯早断所造成社会车流的绿灯时间损失完全由BRT信号相位的前一个相位 (即南北左转相位)来承担,而BRT绿灯延长信号优先对社会车流的时间损失是由BRT信号相位后连续的2个相位来承担,社会车流受影响程度相对要小.因此,在进行BRT信号优先设置时,应当适当增大最大绿灯延长时间gmaxBRT的值,降低最大红灯早断时间值,有利于减少BRT信号优先对社会车流的影响,提高交叉口整体运行效率.
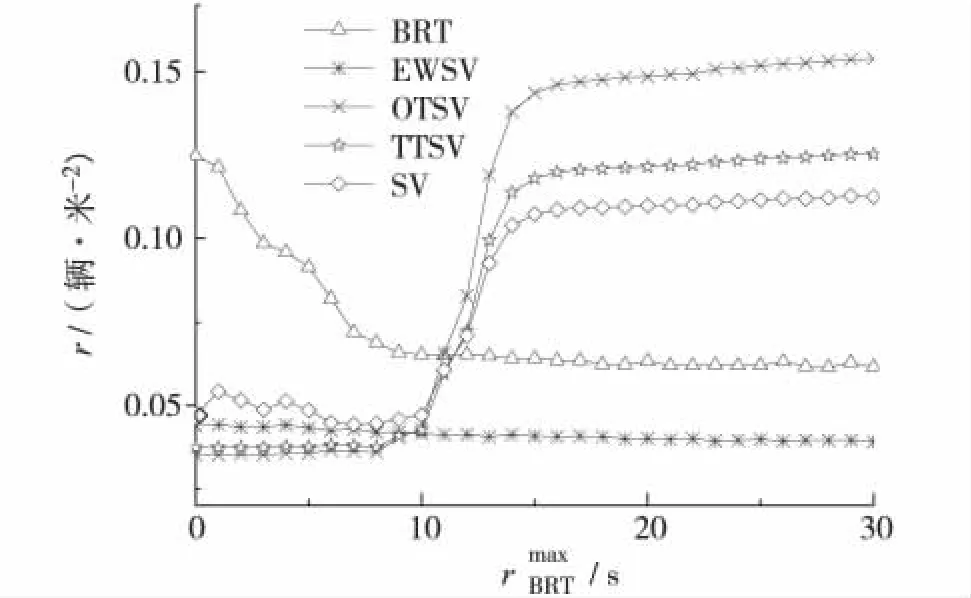
图6 密度随BRT最大红灯早断时间rmaxBRT的变化Fig.6 Density with the greatest red-light-off time of BRT
2.2 信号优先检测器位置的影响
在信号优先检测器与交叉口距离L(元胞数)对交通流影响的模拟中,以下参数取固定值:直行社会车辆产生概率αhead=0.167辆/秒;左转社会车辆产生概率αleft=0.127辆/秒;BRT产生概率αBRT=0.138辆/秒;BRT最大绿灯延长时间=20 s(为使信号优先前后对比明显,适当增大的值).
从图7和图8可见,检测器距离交叉口L>115时,BRT的速度急剧下降,密度上升.此时L/VBRT,i(t)- g'BRT,i>,不满足BRT绿灯延长的信号优先条件,BRT不做优先控制;当L<30时,BRT车流速度和车流密度的波动性较大,特别是L<3时,检测器因L过短无法有效地调节优先信号;当30≤L≤115时,BRT车流平稳且以较高的速度通过交叉口.说明若L过大,RRT信号优先要求的绿灯延长时间大于,导致不做信号优先;若L过小,则BRT信号优先的绿灯延长时间很短,受益的BRT车辆较少,同时受随机因素的影响较明显,波动性增大,优先效果受到影响.
为有效检测BRT的到达并调节信号,同时减少因检测器位置带来的交通流波动,需要合理设置检测器的位置.从模拟结果看,信号优先检测器距离交叉口元胞数L,取30≤L≤110比较合适.

图7 BRT车流速度随检测器距离L变化Fig.7 Velocity with the position of detector
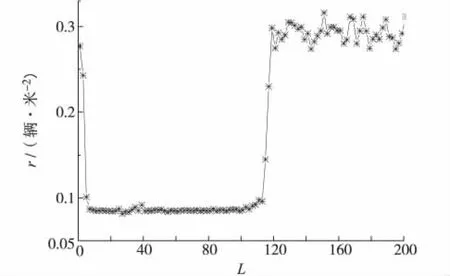
图8 BRT车流密度随检测器距离L变化Fig.8 Density with the position of detector
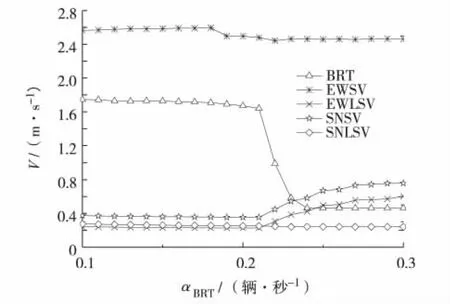
图9 车流速度随BRT产生概率αBRT变化Fig.9 Velocity with the produced probability of BRT
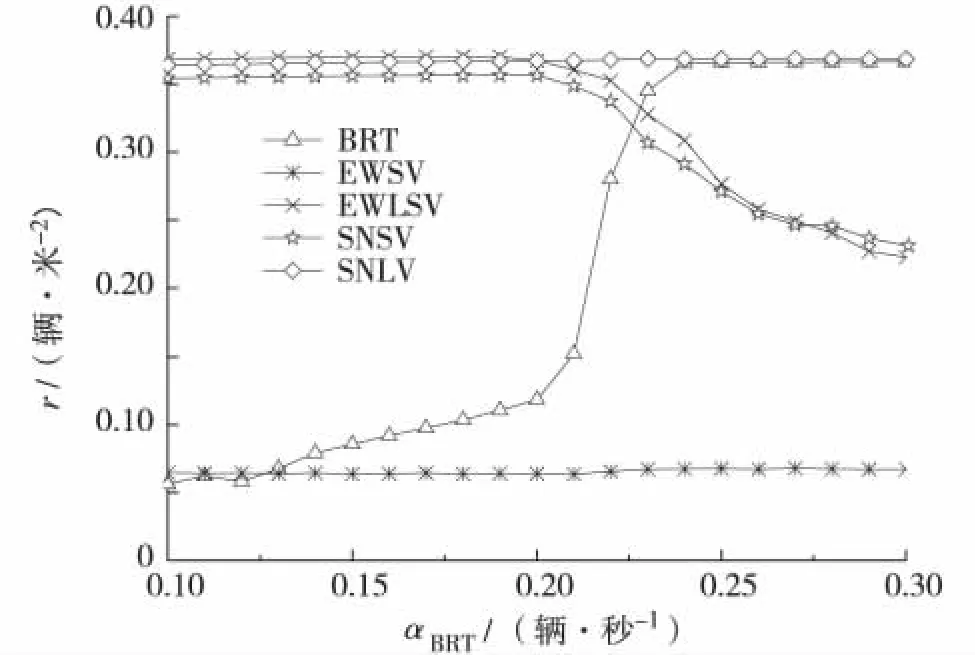
图10 车流密度随BRT产生概率αBRT变化Fig.10 Density with the produced probability of BRT
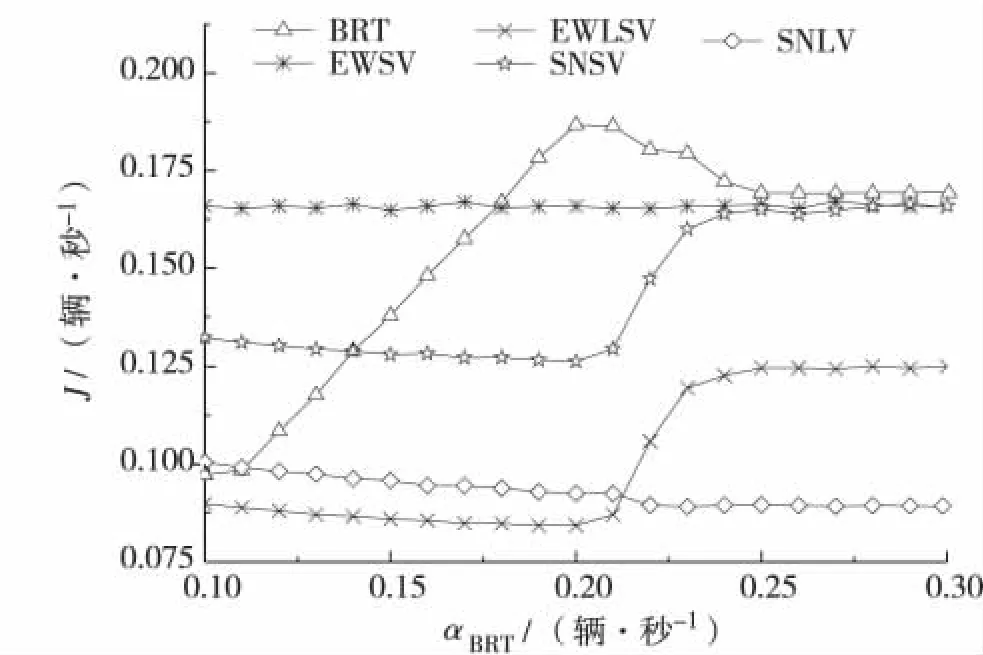
图11 车流量随BRT产生概率αBRT变化Fig.11 Traffic Volume with the produced probability of BRT
2.3 BRT产生概率的影响
在αBRT对交通流影响的模拟中,以下参数取固定值:直行社会车辆产生概率αhead=0.167辆/秒;左转社会车辆产生概率αleft=0.127辆/秒;BRT信号优先检测器离交叉口距离L=40个元胞;BRT最大绿灯延长时间=20 s,最大红灯早断时间rmaxBRT=10 s.其中,BRT表示 BRT车辆;EWSV和EWLSV分别表示东西方向直行和左转社会车辆;SNSV和SNLSV分别表示南北方向直行和左转社会车辆.根据图9~图11可见,当αBRT≤0.21辆/秒时,随着αBRT增大,BRT流量和密度增长较快,而速度增加较小.受αBRT影响,虽然BRT信号优先的绿灯延长和红灯早断时间逐步增大,但是αBRT的增加,提高了BRT车流量,从而降低了信号优先对BRT速度提升的影响.当0.21辆/秒<αBRT≤0.24辆/秒,BRT速度曲线急剧下降,密度曲线急剧上升,而EWLSV和SNSV速度曲线升高,密度曲线降低.随着αBRT增大,BRT车流密度急剧增加,车流速度逐步下降,使BRT到达停车线时间t=L/VBRT相应增大,BRT逐渐不满足其信号优先条件(6)和 (7).因此,BRT获得信号优先的次数逐步减少,社会车流受信号优先的影响相应也减少,使BRT车流量逐渐下降,社会车流速度和车流量逐步增加.当αBRT>0.24辆/秒,EWLSV和SNSV的速度曲线保持平稳.随着αBRT的增大,BRT车流行驶缓慢,BRT到达停车线时间t增大到BRT信号不满足绿灯延长和红灯早断信号优先条件 (6)和(7),BRT信号不做信号优先控制,导致EWLSV和SNSV车流不会因信号优先而产生绿灯时间的损失,从而EWLSV和SNSV的社会车流的速度保持稳定.为获得良好的信号优先效果,需要使BRT产生概率在一个合理的范围内.从模拟结果来看,取αBRT≤0.21辆/秒比较合适.
结 语
本文采用元胞自动机模型研究快速公交信号优先问题,并以开放边界条件模拟了快速公交信号优先控制下的十字交叉路口交通流,只考虑了单个交叉口,没有考虑车流在交叉口的转向选择,实际工作中还需根据交通需求的时空特征、网络结构等因素,综合确定最大绿灯延长时间、最大红灯早断时间、检测器的安放位置以及BRT发车间隔等参数.
/References:
[1] Herber S L,Scott R,Eric B.Board TCRP report 90,bus rapid transit[R].Transportation Research Board,2003.
[2] Weerarooriya G N.An improved bus signal priority model[J].Seisan-Kenkyu,2008,60(4):355-359.
[3] Liu Honghong,Yang Zhaosheng.Research on the signal coordination methodology in a distributed real-time network signal control system with transit priority[J].Journal of Transportation Systems Engineering and Information Technology,2007,7(2):114-118.(in Chinese)刘红红,杨兆升.实施公交优先的交通信号控制系统中信号协调方法研究 [J].交通运输系统工程与信息,2007,7(2):114-118.
[4] Wu J P,Hounsell N.Bus priority using pre-signals[J].Transpn Res-A,1998,32(8):563-583.
[5] Xu Hongfeng,Li Keping,Zheng Mingming.Isolated transit signal priority control strategy based on logic rule [J].Highway and Transport,2008,21(5):96-102.(in Chinese)徐洪峰,李克平,郑明明.基于逻辑规则的单点公交优先控制策略 [J].中国公路学报,2008,21(5):96-102.
[6] Zhuang Yan,Lu Shen.A study of the speed-flow-density relationships on urban roads[J].Journal of Shenzhen University Science and Engineering,2005,54(10):4622-4626.(in Chinese)庄 焰,吕 慎.城市道路交通流三参数关系研究[J].深圳大学学报理工版,2005,54(10):4622-4626.
[7] Angus P Davol.Modeling of traffic signal control and transit signal priority strategies in a microscopic simulation laboratory[D].Rhode Island:Brown University,1997.
[8] Liu Daojun.Research on the Designing and Practicing of the Signal Priority of Bus Rapid Transit[D].Nanjing:Hohai University,2008.(in Chinese)刘道君.快速公交 (BRT)信号优先设计及其应用研究 [D].南京:河海大学,2008.
[9] Peng Lin,Tan Huili,Wu Dayan,et al.A study on multispeed cellular automata model of traffic flow of Main-road with two-lane under the traffic light control[J].Acta Physia Sinica,2004,53(9):2899-2904.(in Chinese)彭 麟,潭惠丽,吴大艳,等.交通灯控制下城市主干道双车道多速元胞自动机交通流模型研究 [J].物理学报,2004,53(9):2899-2904.
[10] Li Shengchun,Kong Lingjiang,Liu Muren,et al.The effects of intelligent traffic light on the crossing traffic flow[J].Acta Physia Sinica,2009,58(4):2266-2270.(in Chinese)李盛春,孔令江,刘慕仁,等.智能交通灯对交叉路口交通流的影响 [J].物理学报,2009,58(4):2266-2270.
[11] Ji Yanjie,Deng Wei.A review of the development and current situation on bus priority at intersections[J].Transportation Systems Engineering and Information Technology,2004,1(1):30-34.(in Chinese)季彦婕,邓 卫.交叉口公交优先技术研究现状及发展综述[J].交通运输系统工程与信息,2004,1(1):30-34.
[12] Kai Nagel,Michael Schreckenberg.Acellular automation model for freeway traffic[J].J Phys I France,1992,2:2221-2229.
