一种顾及障碍物的欧氏距离变换方法*
2013-11-25张青年
张青年
(中山大学地理科学与规划学院,广东广州 510275)
距离变换是一种二值图像处理技术,被广泛地应用于图像处理和模式识别等领域。它将二值图像中的像素区分为特征 (源)和背景两种类型,计算背景像素的距离值而产生一幅距离图像[1]。在距离变换相关研究中提出了大量的距离变换算法,这些算法主要集中在提高距离变换的精确性、简单性和时间效率等方面[2-13]。这些算法通常都没有考虑障碍物的影响,其距离变换是在一个没有障碍物的空间中进行的。但在实际的地理空间中,通常有河流、山丘等地物存在,对距离的传递起到阻隔作用,即障碍物两侧的两个点之间的通行距离并不是直线距离。因此,考虑障碍物影响的距离变换算法才可能得到实际通行距离,该类算法的应用领域包括可视域分析、目标分割、距离/厚度测量、路径规划、影响区域范围等[13]。目前只有少数学者研究了顾及障碍物的距离变换算法[13-17],而且他们的算法也较复杂,都采用了由源向外逐个圈层传递距离的方式和较复杂的像元可见性判断方法。文献 [14-15]最早在距离变换中考虑障碍物,采取逐圈层传递距离方式。Coeurjolly等[16]提出了一种基于可见性分析的距离变换方法,基于角度排序判断像元可视性。Cárdenes等[13]提出了一种基于阻隔点 (Occlusion points)探测的距离变换算法,依据阻隔点相对于障碍物的最大最小遮蔽角判断后续距离传递过程中像元的可见性。这些算法复杂性高,软件实现困难。除此之外,ArcGIS软件也实现了一种距离变换算法,通过累计距离传递路径上各个像元中心点之间距离的和得到距离值。这种算法原理简单,但若源像元与目标像元不在同一行、同一列或同一条对角线上,其累计距离值与二者间的欧氏距离有一定偏差,并且误差随传递距离的增加而增大。本文从提高算法简单性角度出发,提出了一种顾及障碍物的距离变换算法,基于栅格扫描方式传递距离,并采用改良的直线栅格化方式判断像元可见性,算法简单,具有线性时间复杂度,所得到的距离准确度较高。
1 基于栅格扫描的欧氏距离变换原理
以8邻居距离变换为例,基于栅格扫描的欧氏距离变换基本过程是[2]:首先自上而下扫描栅格平面,分别依据左、左上、上和右上侧邻居像元的距离值计算目标像元的距离值,用4个新距离值和目标像元的当前距离值中的最小值更新目标像元的距离值;然后自下而上扫描栅格平面,依据右、右下、下和左下侧邻居像元的距离值计算目标像元的距离值,用4个新距离值和目标像元的当前距离值中的最小值更新目标像元的距离值。
在距离变换过程中,可以采取累计距离的方式计算目标像元到源的距离 (图1),可表示为:

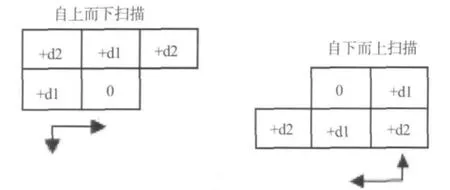
图1 栅格扫描与距离增量Fig.1 Distance offset in raster scan algorithm
其中,dij为目标像元Pij的距离,duv为邻居像元Puv的距离,Δd为Pij与Puv之间的距离。目标像元与其上、下、左、右4个邻居像元之间的距离为1,与左上、右上、左下、右下4个邻居像元之间的距离为。
但这种累计距离计算方式只在源的上、下、左、右及左上、右上、左下、右下8个方向上的距离传递路径是直线,得到准确的直线距离;在其他方向上的距离传递路径都是一条从源到目标像元的折线,该折线长度比二者之间的直线距离大。设某位置到源的行距和列距的最大值为k,其最大误差方向的误差为 0.089k[17]。
在计算空间中存在障碍物的情况下,只需限定障碍物像元不参与距离比较,该算法仍可有效地进行距离变换。但随着离源的距离增加,其累积误差不断增大。这种算法被ArcGIS用于计算成本距离,适用于小幅图像的距离计算。
更准确距离计算方法是依据偏移量计算像元到源的直线距离。在距离变换过程中,记录各像元到源的行偏移量和列偏移量,可以视为一个向量,依据距离向量计算直线距离。目标像元到源的偏移量依据其邻居像元的偏移量来计算,即

其中,aij为目标像元Pij的距离向量,auv为邻居像元 Puv的距离向量,为从 Pij到 Puv的距离向量。如图2所示,目标像元到左、左上、上和右上侧邻居像元的距离向量分别为 (1,0)、 (1,1)、(0,1)和 (-1,1),目标像元到右、右下、下和左下侧邻居像元的距离向量分别为 (-1,0)、(-1, -1)、(0, -1)和 (1, -1)。采用距离向量方式能够得到准确的欧氏距离。
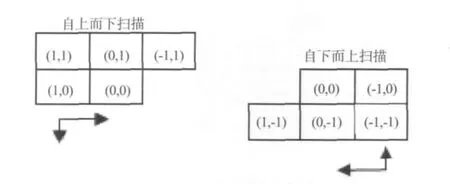
图2 栅格扫描与距离矢量Fig.2 Distance vector in raster scan algorithm
采用偏移量计算距离的方式不适合于存在障碍物的情形。在目标像元到源的连线上有障碍物时,源到目标像元的距离传递路径应为一条绕过障碍物的折线,此时直线距离所代表的直线传递路径显然不符合实际情况。
2 顾及障碍物的欧氏距离变换方法
2.1 算法框架
如前所述,在目标像元到特征像元 (源)的连线上存在障碍物时,目标像元被障碍物阻隔,源到目标像元的距离传递路径不再是一条直线。本文在基于距离矢量的栅格扫描算法中引入“虚拟源”,允许距离传递路径发生转折,在被障碍物阻隔的区域中继续进行距离传递。虚拟源是被障碍物阻隔的一个非障碍物像元。为区别起见,将原有特征像元称为初始源。
算法的主要过程如下:
1)初始化。假定栅格平面大小为M×N,设置4个二维数组 e[M,N],a[M,N],b[M,N]和 s[M,N]。ei,j记录像元 Pi,j是否以自身为源,aij和 bij分别记录像元Pi,j的源 (初始源或虚拟源)的列坐标和行坐标,si,j记录像元 Pi,j到初始源的距离,1 ≤i≤M,1≤j≤N。如果像元Pi,j是初始源,令aij=i,bij=j,ei,j=1,si,j=0;否则令 ei,j=0,si,j=2×max(M,N)。
2)以栅格平面的左上角为起点,行号递增,列号递增,自上而下顺序访问各像元 Pi,j。若 Pi,j不是障碍物像元,则依据其左、左上、上和右上侧邻居像元依次更新其源坐标和距离 aij、bij、ei,j、si,j。不失一般性,记邻居像元为U。
首先判断U是否为障碍物像元,若是则直接跳过,不参与距离比较和更新。
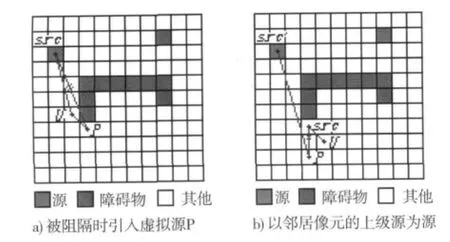
图3 依据邻居像元U更新目标像元P的距离Fig.3 Update distance of P according to neighbor U
然后判断U的源src(U)的上级源src(src(U))是否可直达目标像元P(图3b)。如果P到src(src(U))的连线上没有任何障碍物像元,则src(src(U))可直达P,依据它们的行列坐标计算二者之间的直线距离snew。若snew小于P的距离值 sij,则以 src(src(U))为源,更新 eij,aij,bij,sij。令 eij=0,aij=srcx(src(U)),bij=srcy(src(U)),sij=snew。其中srcx(src(U))和srcy(src(U))分别表示src(src(U))的列坐标和行坐标。
若上级源src(src(U))不能直达P,则判断src(U)是否可直达P(图3a)。若src(U)可直达P,依据它们的行列坐标计算二者之间的直线距离snew。若snew小于 P的距离值 sij,则以 src(U)为源,更新 eij,aij,bij,sij。令 eij=0,aij=srcx(U),bij=srcy(U),sij=snew。
若src(U)不能直达P(图3a),则计算经过U到达P的距离snew。令snew=s(U)+Δd。其中,Δd为P与U之间的直线距离。若snew小于P的距离值sij,则以src(U)为上级源,更新 eij,aij,bij,sij。令 eij=1,aij=i,bij=j,sij=snew。即引入 P 为虚拟源。
3)以栅格平面的右下角为起点,行号递减,列号递减,自下而上顺序访问各像元 Pi,j。若 Pi,j不是障碍物像元,则依据其右、右下、下和左下侧邻居像元依次更新ei,j、它的源的坐标aij和bij及距离 si,j。
4)重复执行步骤2)和3)若干次,直到距离没有变化为止。
2.2 可见性判断
上述算法的一个核心过程就是可见性判断,即源到障碍物之间是否有障碍物。Coeurjolly et al.[16]基于障碍物的角度排序进行可见性测试;Cárdenes et al.[13]则记录每个LNHP对应的障碍物的遮蔽角范围并将落在遮蔽角范围内的像元判定为不可见。本文基于直线栅格化算法直接判断目标的可见性。
直线栅格化有八方向栅格化、恒密度栅格化、全路径栅格化等多种算法。其中八方向栅格化得到的直线最细,每行或每列只有1个像元被涂黑;恒密度栅格化得到的直线粗细均匀,相邻行或列之间有程度相似的重复;全路径栅格化则将直线经过的每个像元都涂黑。
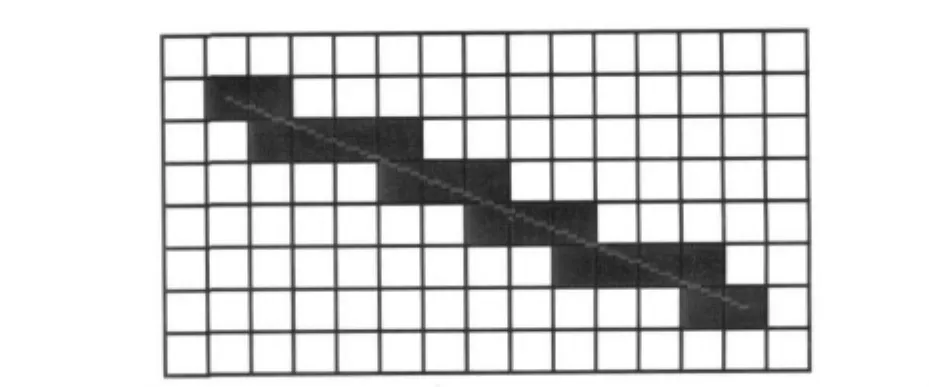
图4 全路径栅格化Fig.4 Full path rasterization
显然,可以依据全路径栅格化算法判定目标像元的可见性。即,在全路径栅格化过程中,从源开始检测位于路径上的每一个像元,只要有一个像元是障碍物像元,则目标像元不可见;否则继续检测下一个像元,如果路径上的所有像元都不是障碍物像元,则目标像元位于源的可见区域内。
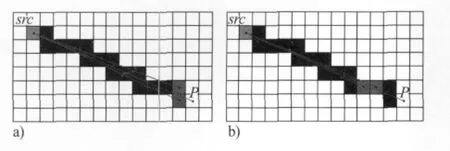
图5 确定像元P的可见性Fig.5 Check the visibility of pixel P
本文基于全路径栅格化原理提出一种高效的可见性判断算法,不需要检测直线经过的每一个像元是否为障碍物。其算法原理是从目标像元P开始向源src反向栅格化,判断最初两行 (或列)像元的可见性即可。设该直线的跨度为m行n列,如果m<n,逐列检测像元是否需要涂黑,否则逐行检测像元是否需要涂黑。如果需要涂黑的多个像元的源就是src,则可直接判定目标像元P在src的可见域内,而不必遍历直线上的所有像元并检测其是否为障碍物。以图5为例,从P到src的连线跨6行13列,从P开始对连线上的像元进行检测,每个列最多检测2个像元。具体算法过程如下:
1)如果连线上某个列有2个像元并且它们的源都是src,则 P在src的可见域内 (如图5a所示),退出检测过程;
2)如果连线上某个列只有1个像元并且它的源是src,继续检测连线上的下一列的所有像元的源是否为src,如果下一列全部像元的源都是src,则P在src的可见域内 (如图5b所示),退出检测过程;
3)如果连线上遇到一个障碍物像元,则P不在src的可见域内,退出检测过程;
4)其他情况下继续向前进行检测。
可以预见,如果P在src的可见域内,其连线上靠近P处一定有源为src的像元,因此检测过程很快就会结束。即使连线长、经过的像元多,也只需检测靠近P的数个像元。
2.3 算法效率分析
分析上述算法框架可以发现,其基本过程是栅格扫描,每个像元被扫描2次,每次与4个邻居像元对应的距离值进行比较。设像元个数为n,则距离比较和赋值的次数为8n。参与比较的距离值是依据邻居像元计算出来的,在距离计算过程中要执行可见性判断。本文采取直线栅格化算法判定可见性,它是一个双重循环算法,但实际上并不需要检测连线上的所有像元是否为障碍物,而只需检测靠近目标像元一端的有限个像元,因此该可见性判断算法是常量阶的。另外,在目标像元被障碍物遮挡层次较深的情况下,扫描过程需要重复多次才能完成距离传播,但重复的次数可以视为一个常数。因此,该距离变换算法总体上的时间复杂度为O(n)。
3 实验结果及分析
为了验证上述方法的可行性,本文构造了一幅255行318列的图像进行了距离变换实验,计算结果见图6a。图6a中有3个源,其中O1和O2为点状源,O3为面状源;有3个面状障碍物B1、B2和B3。从图6a可以看出,从源向外,距离逐渐增大,距离等值线之间的间距相等 (5个栅格距离)。点源周围的距离等值线浑圆,呈现为同心圆结构;面源周围的等值线也是一种圈层结构,其延伸趋势与面源轮廓线一致。距离等值线圈层结构在遇到障碍物B1和B2之后遭到破坏,在障碍物背后继续进行距离传播,并在障碍物端点处形成新的圈层结构(例如在B1背后靠近两端处)。在遇到第二重障碍物B3之后,圈层结构再次被破坏,在B3背后靠近两端处形成新的圈层结构。
由于在障碍空间中逐像元计算距离真值难度很大,无法将本文算法计算结果与距离真值进行对比。这里改用与ArcGIS软件计算结果比较的方式进行验证。目前顾及障碍物的距离变换算法很少且算法复杂,在实际工作中通常利用ArcGIS软件进行距离变换,因此ArcGIS软件计算结果具有一定代表性。从前述分析可知,ArcGIS累计距离算法中的距离传递路径和本文算法中的距离传递路径都绕过了障碍物,计算出的距离值都大于实际距离值。因此,计算出的距离较小的算法更有效 (其结果更接近距离真值)。将ArcGIS计算的距离与本文算法计算的距离相减,得到距离差值图,见图6b。可以发现,本文算法计算的距离值更小。据第1节欧氏距离变换原理分析可知,累计距离在源周围的上、下、左、右、左上、左下、右上和右下共8个方向上是没有误差的,而在其他方向上都有距离误差,而且在这8个方向中的相邻两个方向的角平分线上误差最大。在图6b中,两种计算结果在点状源O1和O2周围的“米”字形方向上距离差为0,在面状源O3周围的叠加“米”字形方向上距离差也为0,表明本文算法在源周围的8个方向上没有误差。在源周围的“米”字形图案的相邻两条分岔的角平分线方向上,ArcGIS计算的距离值相对于本文算法的距离值增加最多,这与ArcGIS距离累计算法的误差在各方向上的分布一致,表明本文算法在8方向之外其他方向上的距离值也接近于真值。在障碍物背后,距离值最小的像元作为新的“源”继续传递距离,两种算法的距离差在障碍物背后形成新的不完整的“米”字形图案。由于两种算法在新的“源”位置上存在距离差,“源”周围的8个方向上也存在与“源”位置上相等的距离差,其他方向上的距离差更大。此外,两种算法计算结果的距离差随着与源的距离的增加而变大,两种算法的最大距离差为15.20。其原因是,ArcGIS距离累计算法的误差与到源的距离正相关,而本文算法的误差与空间距离无关。

图6 基于栅格扫描的欧氏距离变换实验Fig.6 Case study of raster scan based euclidean distance transformation
虽然ArcGIS计算结果不是距离真值图,无法分析本文算法计算结果的最大误差,但我们可以依据算法原理对最大误差作一个初步分析,见图7。依据本文算法,源s在传递距离到p时遇到障碍物,经过虚拟源s'之后继续传递距离到q。这条路径上,障碍物前方的sp段和后方的s'q段为直线距离,都没有误差。但绕过障碍物的ps'q段没有紧贴障碍物的边沿uv(uv为障碍物底边的两个角),有一定的误差。这里分spu和us'q两段来分析。当s离p很远时,折线spu与直线su几乎重合,其长度差可忽略不计;反之,则有一定差距,当s和p为对角线相邻时两者的长度差最大,为1+-=0.126。类似地,如果s'q位于uv的同一侧 (例如目标像元为 q'),则 us'q'的长度小于uvq',应取us'q'长度作为真距离,此时us'q'没有误差;反之,当s'和q位于uv的两侧时,us'q的长度大于uvq,存在一定误差,并且q与s'对角线相邻时,误差达到最大,为 2-1=0.414。因此,障碍物两侧的最大误差和为0.540。将障碍物遮挡的区域称为阴影区,阴影区内最大误差为0.540,非阴影区内无误差。若距离传递路径经过n个障碍物,第n个障碍物背后的阴影区内的最大误差不超过0.540 n。
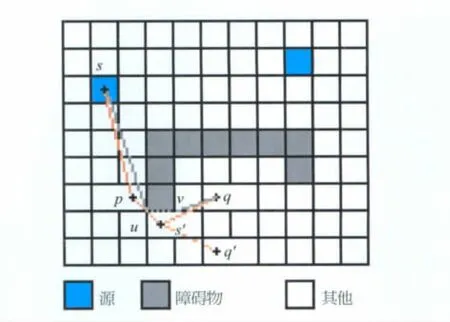
图7 误差分析Fig.7 Error analysis
4 结论
通过以上分析和实验,可以得出以下结论:
1)在距离传播过程中进行可见性检测,并在目标不可见时引入“虚拟源”,确保了在障碍物背后继续进行有效的距离传播,所得距离是从初始源出发绕过障碍物的折线距离。
2)在可见性检测确定上级源可见的情况下,直接以当前的源的上级源为中继向外进行距离传播,从而避免了传播路径经过当前的源而发生不必要的转折,使所得距离值更接近于最短可通行距离。
3)本文算法的距离准确性较高,优于ArcGIS距离累计算法,在距离传递路径经过的第n个障碍物背后的阴影区内最大误差为0.540 n,非阴影区内无误差。
4)本文算法简单,不涉及桶排序等任何复杂的数据结构,易于理解和实现,适合于点、线、面3种形态的源和障碍物的距离变换。
5)本文算法的时间复杂度为O(n),计算效率高。
[1]ROSENFELD A,PFALTZ J.Sequential operations in digital picutures processing[J].Journal of the ACM,1966,13(4):471-494.
[2]BORGEFORS G.Distance transformations in digital images[J].Computer Vision,Graphics and Image Processing,1986,34:344 -371.
[3]PAGLIERONI D W.A unified distance transform algorithm and architecture[J].Machine Vision and Applications,1992,5(1):47-55.
[4]SAITO T,TORIWAKI J.New algorithms for euclidean distance transformation of an n-dimensional digitized picture with applications[J].Pattern Recognition,1994,27:1551-1565.
[5]FABBRI R,COSTA L D F,TORELLI J C,et al.2D Euclidean distance transform algorithms:A comparative survey[J].ACM Computing Surveys,2008,40(1):1-44.
[6]陈崚.完全欧几里德距离变换的最优算法[J].计算机学报,1995,18(8):611-616.
[7]王钲旋,李文辉,庞云阶.基于围线追踪的完全欧氏距离变换算法[J].计算机学报,1998,21(3):217-222.
[8]任勇勇,潘泉,张绍武,等.基于围线分层扫描的完全欧氏距离变换算法[J].中国图象图形学报,2011,16(1):32-36.
[9]LUCET Y.New sequential exact Euclidean distance transform algorithms based on convex analysis[J].Image and Vision Computing,2009,27(2):37-44.
[10]徐达丽,任洪娥,徐海涛,等.基于链码技术的距离变换改进算法[J].计算机工程与应用,2009,45(25):176-178.
[11]陆宗骐,朱煜.用带形状校正的腐蚀膨胀实现Euclidean距离变换[J].中国图象图形学报,2010,15(2):294-300.
[12]GUSTAVSON S,STRAND R.Anti-aliased Euclidean distance transform[J].Pattern Recognition Letters,2011,32:252-257.
[13]CáRDENES R,ALBEROLA-LóPEZ C,RUIZ-ALZOLA J.Fast and accurate geodesic distance transform by ordered propagation[J].Image and Vision Computing,2010,28:307-316.
[14]LANTUEJOUL C,MAISONNEUVE F.Geodesic methods in quantitative image analysis[J].Pattern Recognition,1984,17:177 -187.
[15]PIPER J,GRANUM E.Computing distance transformations in convex and nonconvex domains[J].Pattern Recognition,1987,20(6):599 -615.
[16]COEURJOLLY D,MIGUET S,TOUGNE L.2D and 3D visibility in discrete geometry:an application to discrete geodesic paths[J].Pattern Recognition Letters,2004,25:561-570.
[17]胡鹏,游链,杨传勇,等.地图代数[M].2版.武汉:武汉大学出版社,2006.
