同步发电机励磁试验平台的研究
2013-11-21刘觉民
向 增,刘觉民,韩 兵
(1.珠海万力达电气股份有限公司,广东珠海 519000;2.湖南大学,湖南长沙 410082;3.大唐华银电力股份有限公司,湖南长沙 410082)
0 引言
同步发电机模拟励磁系统是用于电力系统动态模拟实验室的重要设备,其对电力系统中的真实同步发电机及其励磁系统进行物理模拟,以便研究电力系统中的大干扰问题和机电暂态过程。
本文介绍的数字式励磁试验平台为励磁控制技术的研究提供一个物理的试验平台。
1 硬件设计
1.1 系统结构设计
模拟励磁系统主电路由功率单元、励磁调节器组成[1]。功率单元采用三相桥式整流电路,由励磁调节器控制整流触发角α的大小,进而调节励磁电压。为同步发电机的转子磁场提供直流电流,建立磁场。图1为30 kVA励磁装置的结构框图[2]。
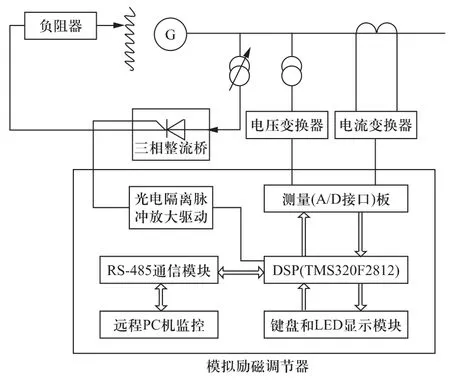
图1 同步发电机模拟励磁系统框图
1.2 励磁装置的硬件设计
在硬件设计中,根据30 kVA励磁装置的特点,设计了以DSP单片机为控制核心的外围硬件电路[3-4]。包括频率跟踪模块、A/D采样模块、移相触发脉冲等。
频率跟踪模块将发电机机端电压的正弦波信号转换成方波信号。利用DSP捕捉单元捕捉方波信号的上升沿或下降沿,确定发电机定子电压的频率。LM324单端供电,做比较器用,每当输入信号从负电压过零跳变到正电压时,其输出端电压就从-12 V变成+12 V,经过限幅和隔离后接到DSP事件管理器的捕获单元端口CAP。当CAP捕获到方波信号的上升沿时,保存计数器的值记为T2CNT1,当一个周期结束即下一个脉冲上升沿到来时,记录计数器的值记为T2CNT2,得到相邻两次上升沿的计数器值n=T2CNT2-T2CNT1,假定计数器频率为fc,则机端电压频率f=fc/n。图2为频率测量电路。
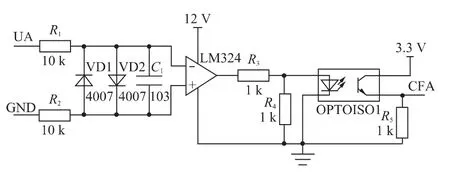
图2 频率跟踪模块电路
A/D采样模块利用DSP的A/D单元对系统需要的电气参量,如发电机机端相电压、电流,整流电路的电压、电流等进行采样。由于现场采样信号不能直接送入DSP的A/D单元,需要调理电路调整电压。
本文以发电机端电压调理电路为例来介绍A/D调理电路。交流电压采样电路采用中精密电流型电压互感器TV1013-1,其输入输出的额定电流为2 mA/2 mA,互感器输入端的限流电阻R1为51 kΩ,采样电阻R2为250 Ω,转换成电压值的范围为-0.5~0.5 V。由于A/D转换器的信号需求,采样信号必须是正极性电压。图3中前一个运算放大器是给输入信号加0.5 V的偏置电压,后一个运算放大器是将输入信号进行反向放大三倍,使最后采样电路的输出信号为0~3 V的脉动直流电流,送入A/D转换器。图3为对发电机机端电压采样调理电路。
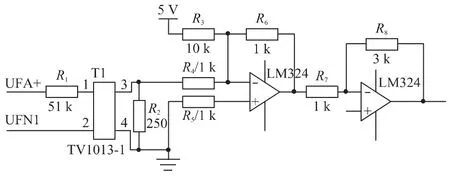
图3 机端电压调理电路
1.3 高频触发列
在微机励磁系统变流电路中,用于电气隔离的晶闸管触发脉冲变压器对高电平不具备保持能力,传输触发脉冲的宽度远小于晶闸管导通时实际所需的脉冲宽度。如不采取措施,将导致晶闸管不能可靠触发,整流输出波形不稳定,励磁系统不能正常工作。通常采用模拟电路或数字电路生成高频脉冲列以代替一定宽度的触发脉冲[5]。
在本励磁调节器中,采用高频触发脉冲列作为移相触发脉冲,程序包括三个中断:(1)当DSP捕获到过零点后,进入CAP捕获中断处理程序。首先,计算发电机机端电压的周期;然后,判断是否允许触发(是否缺相、是否对应正序或负序)。若不允许,将PWMx口设为高阻态,并禁止全比较中断;若允许触发,根据相序相位自适应算法进行推算,准备对哪两路PWMx置高;最后将触发角α+30°所对应的计数器值赋给T2CNT。(2)在T2比较中断中,使能T2周期中断标志,根据周期中断次数赋不同值给T2PR,8个高频脉冲共需要16次周期中断。(3)T2PR周期中断中,根据触发顺序设置对应两路的PWMx电平,并根据周期中断次数来设置下一周期值。移相触发脉冲的产生,需要精确定时,设置好定时器的预定标、定时时间、主频频率等参数,并在定时中断中,将脉冲输出管脚间隔置高、置低,最后可通过示波器检测设置频率是否与波形的频率一致。图4为实现“双窄脉冲触发方式”的高频脉冲列电压波形。
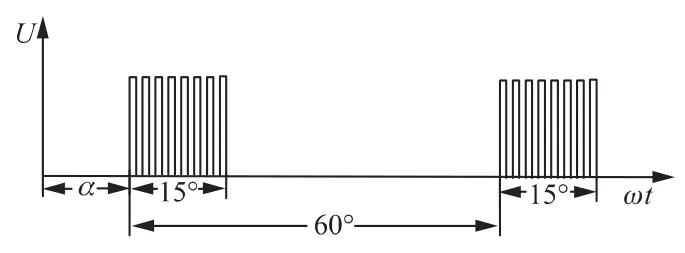
图4 “双窄脉冲”高频触发列
2 软件设计
2.1 变论域模糊PID控制
由于系统模型经常发生变化,受外界影响较大。因此常规经典的PID控制在实际运行中需要经常手动调节参数。这给励磁控制带来了不便,而且控制效果也不甚理想[6]。
2.1.1 控制器结构设计
变论域模糊自调整PID励磁控制器采用模糊推理方法对参数进行在线调整,以满足不同工况对控制参数的不同要求,仿真结果表明,其与经典PID励磁控制器和传统的模糊PID励磁控制器相比,在改善系统动态品质及对系统参数发生改变时的鲁棒性[7]均优于常规PID励磁控制器。
利用变论域模糊PID控制器的优势。设计基于变论域模糊PID控制的电压调节器结构如图5所示。
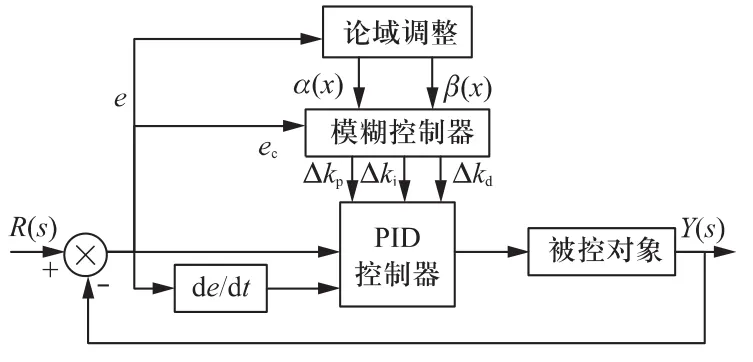
图5 变论域模糊PID励磁控制器框图
为达到满意的控制精度,定义:[-e0,e0]为输入变量e的基本论域;[-e∞,e∞]为输入变量ec的基本论域;[-kp0,kp0]为输出变量 kp的基本论域;[-ki0,ki0]为输出变量 ki的基本论域;[-kd0,kd0]为输出变量 kd的基本论域。为简单起见,统一如下:Xp=[-Ep,Ep](p=1、2)为输入变量 Xp(p=1、2)的基本论域,Yq=[-kq,kq](q=1、2、3)为输入变量 yq(q=1、2、3)的基本论域。7)为Xp上的模糊划分;上的模糊划分,则结合模糊推理规则:如果x1是 a1j,且 x2是 a2j,那么 y1就是 bj-1,y2就是 bj,y3就是bj+1。此时有

2.1.2 伸缩因子的选择
所谓变论域是指论域可以分别随着输入变量和输出变量的变化而自行调整,即论域Xp和Yq可以分别随着变量xp和yq的变化而自行调整,推广记为:输入变量是基本论域X(x)=[-α(x)E,α(x)E],输出变量是基本论域Y(y)=[-β(y)K,β(y)K],其中 α(x)与 β(y)称为论域的伸缩因子。E表示输入变量e和ec,K表示输出变量kp,ki和kd,相对于变论域而言,原来的论域称为初始论域。一般地,伸缩因子满足对偶性、避零性、单调性、协调性、正规性。常见的函数有
α(x)=1 - λe-kx,λ ∈ (0,1),k > 0
α(x)表示输入变量论域的伸缩因子,β(x)表示输出变量论域的伸缩因子。
本文中对于输入论域的伸缩因子,选用:α(x)=1- λe-kx,λ∈(0,1),k >0;这里取 λ =0.6、k=0.5;x 表示输入变量 e或 ec。
对于输出论域的伸缩因子,考虑后kp,ki和kd对控制性能的影响,采用原则:输出变量kp和kd的伸缩因子应具有与误差的单调一致性,而输出变量ki的伸缩因子则具有与误差的单调反向性。亦即输出论域的伸缩因子应使得输出变量kp和ki适当大,kd适当小。为此选取输出变量kp和ki的论域伸缩因子为0.7),亦即
论域的伸缩变化如图6所示。
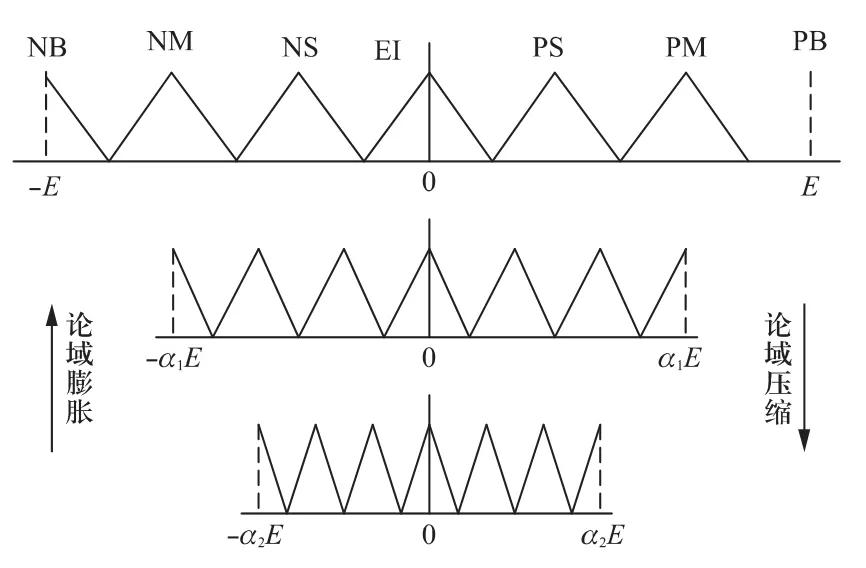
图6 论域的伸缩变化示意图
2.2 主程序流程图
励磁软件主要由主程序、各子程序及中断程序组成。其中主程序分为初始化与循环2部分。初始化主要包括系统初始化、中断初始化、软件初始化和参数初始化;循环部分则主要是调用与协调各功能模块(子程序)的工作。各子程序完成励磁各种控制或限制等功能;中断程序完成模拟量采样、测频及脉冲触发等工作。主程序流程图如图7所示。

图7 主程序流程图
3 试验结果与分析
将该励磁装置在一台30 kVA同步三相发电机上进行试验。试验系统的参数如下:发电机额定励磁电压111 V,发电机额定励磁电流5.1 A,强励倍数 2.0。
在电力系统动态模拟试验室中,对30 kVA模拟发电机励磁系统进行测试,主要对其静态和动态性能进行测试。结果表明,30 kVA型模拟发电机励磁系统的动静态性能良好,无功控制稳定,能真实再现基于DSP实际发电机的励磁工作状况。
开环特性表示发电机励磁系统起动时的运行特性,根据控制方式的不同,可分为手动方式起动和恒触发角方式起动等。发电机原动控制系统开机起动发电机组,升速到额定转速后,分别按不同的方式起动,记录每次起动的数据如表1所示。
自动方式起动时,无需“增磁”,发电机自动建压到额定电压的90%。起动过程中,机端电压超调量小于10%,无明显振荡,4~5 s后机端电压平稳。手动方式和恒触发角方式起动均需要“增磁”,由表1可知,采用手动方式起动的特性较好,数字控制精确,平稳不抖动,对发电机和电网的冲击小。

表1 手动方式(恒励磁电流)
4 结语
本文采用DSP作为励磁装置的控制核心。试验表明,该励磁装置的性能令人满意。这种基于DSP的模拟励磁装置为电力系统动态模拟实验室试验提供了良好试验平台。该励磁装置技术领先,可靠性、智能化程度高,具有很好的推广价值。
[1]李基成.现代同步发电机励磁系统设计及应用[M].北京:中国电力出版社,2002.
[2]付义,刘觉民,鲁文军.利用改进prony算法的励磁调节器中PSS的设计[J].电力自动化设备,2011,4(31):82-86.
[3]Texas Instruments Incorporated.TMS320F28x EV Peripheral Reference Guide[G].2003.
[4]Texas Instruments Incorporated.TMS320F28x Serial Communication Interface(SCI)Peripheral Reference Guide[G].2002.
[5]刘觉民,付义,向增,等.微机控制高频脉冲列实现晶闸管“双窄脉冲触发”的研究与应用[J].湖南大学学报(自然科学版),2011,38(12):40-45.
[6]揭海宝,康积涛,李平.基于变论域模糊PID控制的同步发电机励磁研究[J].电力自动化设备,2011:101-104.
[7]卢强,孙元章.电力系统非线性控制[M].北京:科学出版社,1993.
