弹丸炮口初始速度和姿态测量方法分析与比较
2013-11-21范建英
秦 丽,范建英,李 杰,刘 俊
(1.中北大学 电子测试技术国家重点实验室,山西 太原 030051;2.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
随着现代精确武器的日益发展,常规弹药制导化改造是准确武器打击的主要发展方向[1]。炮口初始参数的准确测量直接关系到外弹道解算精度,影响弹丸的命中率。炮口初始参数是指弹丸发射出炮口时摆脱燃气对其的作用且仍保持惯性作用时所测量的参数。其中,炮口初始速度和初始姿态是常规弹药炮口初始数据的主要参数,由于弹丸飞行出炮口时的高旋转、高过载运动且伴有高温高压的火药燃气、烟雾等恶劣环境的影响,使得测量炮口初始速度、初始姿态角比较困难。
国内外研究者已提出采用外测法和内测法获取炮口初始速度和初始姿态信息。外测法需要借助发射平台或弹体外部仪器设备,如激光测速、毫米波测速雷达测速、太阳方位角原理测姿态、高速摄像机测姿态等[2-6];内测法是直接将测量单元或系统安装于弹体内部来实时测量弹丸信息并且进行弹道解算,如光学原理测速度与姿态、磁感应原理测速度与姿态等方法。在详细介绍几种典型弹丸炮口初始速度和姿态测量方法的基础上,分析比较了各种测量方法的特点,根据当前的研究现状和实际应用需要,提出了该领域的发展方向,为进一步工程运用奠定了基础。
1 炮口初始速度和初始姿态测量原理
1.1 外测法测量
早期研究者利用外测法测量弹丸炮口初始参数是将测量装置安装于炮口上或炮管外,事后借助发射平台进行弹道解算,其依赖于一定的外界环境来测量相关信息。
1.1.1 外测法测量初始速度
外测法测量弹丸炮口初始速度的典型测量方法有激光原理、毫米波雷达测速等。
1.1.1.1 激光原理测速
激光原理测速以迫击弹在膛内运动速度测试为例来说明。激光测速原理如图1所示。该测速方法需在炮口放置一个激光源,该激光源发出的光束通过平面镜1反射到弹丸头部的反射面上,再由弹头反射至平面镜2将光线反射到光点记录仪或高速射影机来记录,从而画出弹丸飞出炮口的运动轨迹。
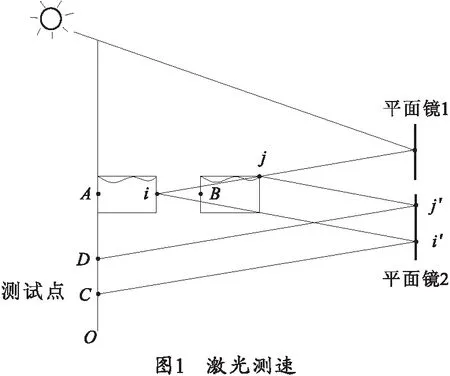
弹丸尾部从起始位置A点运动到B点时,激光源发出的光线由弹丸头部的i点移到j点,根据光学反射原理,相应的其在平面镜2由i′、j′反射后,被测试点的光线由C点移动到D点,其移动距离为i′j′,通过记录仪可画出行程-时间曲线, 进而可得速度-时间曲线求得弹丸炮口初始速度。
1.1.1.2 毫米波雷达测速
随着各国国防科技的发展,对武器的打击精度也提出了新的要求,弹丸炮口初始速度作为武器打击精度的重要参数之一,成为各国研究的重点。国内研究者率先研制出毫米波测速雷达的测速装置,该装置主要由高频头、红外启动器、预处理系统及终端系统组成。测速原理如图2所示。
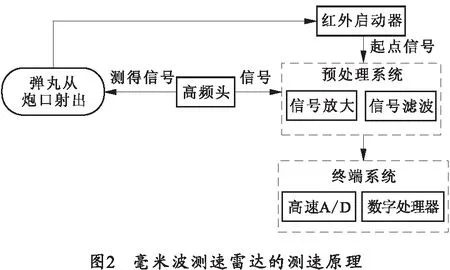
弹丸飞出炮口时,红外启动器通过弹丸飞出炮口瞬间的光,产生电信号作为起点信号来启动雷达开始计时。弹丸在雷达辐射的电磁场中飞行时,高频头测得弹丸飞出炮口的多普勒信号,若进行内弹道测试,将该信号送入预处理系统中进行信号放大、滤波后进入终端系统的高速A/D转换,并将转换后的数字信号送入数字处理器中解算得内弹道L-t、v-t曲线。若进行外弹道解算,对离散信号按时间分段并进行FFT变换求得各分段的频谱,根据主谱所形成的轨迹就可确定弹丸速度变化曲线,再用最小二乘法拟合得到v-t曲线,并推出外弹道初始速度,如CS-2毫米波雷达。
1.1.2 外测法测量初始姿态
电力企业的资金管理,是为了保证资金使用的安全性、效益性和流动性,以及对企业日常运营活动、投资活动、筹资活动产生的现金流进行日常管理的过程。其资金管理的范围不仅包括对资金存量的监督和管理,还包括对资金流量的实时监控,涵盖了流动资金、固定资金、专项资金三种资金形态的管理。其资金管理领域大致可分为三大类:一是电力企业销售电力能源所产生的资金;二是电力企业投资工程物资所支付的资金,包括工程项目的承接、建设、生产及维护等;三是企业其他运营资金,主要为辅助电力生产、销售的行政管理部门、后勤服务部门等所需的资金。伴随电力企业发展,电力企业资金管理呈现出以下四个方面的特征:
外测法测量弹丸炮口初始姿态的主要测量方法有太阳方位角原理测量、高速摄像机测量等,利用高速摄影机可以跟踪拍摄炮弹、穿甲弹、火箭弹等高速飞行弹体的姿态,原理是在其前面放置一个转镜,由外部信号控制触发转镜来开始跟踪,当弹丸飞行进入转镜的跟踪区域时,电机按照预先设定好的规律旋转转镜,用高速摄像机来拍摄弹丸飞行过程。
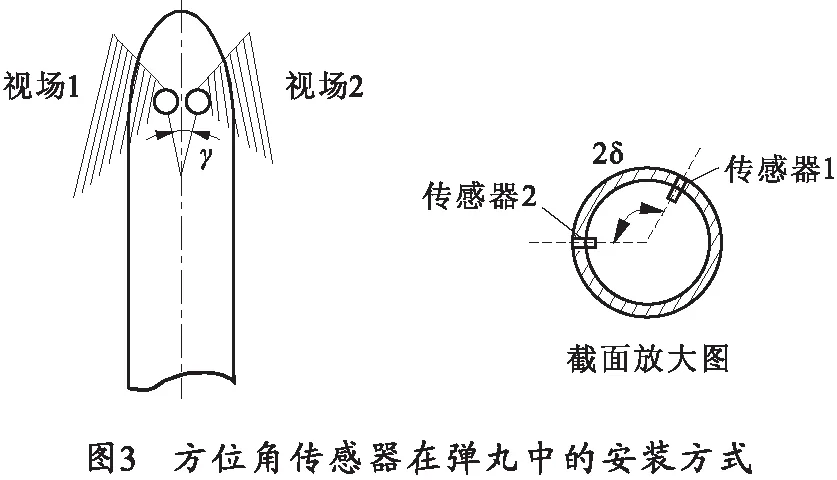
基于太阳方位角原理测姿态,美国和俄罗斯已研制出相应地遥测系统,并已用于实弹测试中;我国某大学也研制出此系统,并成功用于某大口径榴弹炮靶场试验中。太阳方位角原理测量姿态主要是利用太阳方位角传感器与太阳光间的关系来测量炮弹飞行姿态。方位角传感器主要由光缝、光敏器件及放大器构成,其在弹丸内的安装方式如图3所示。两个光敏器件与光隙构成两个视场,两个探头以视场相对于弹丸纵轴的一定方向安装在弹丸引信的同一个圆周上。γ表示任一光缝的视场相对弹轴的倾角;δ表示两个光缝传感器的半角;当弹丸绕其轴旋转飞行时,太阳方位角传感器与光矢量的视场处于同一平面时,太阳方位角传感器就输出一脉冲信号。这样,弹丸每旋转一周,两个传感器就输出不同的脉冲信号,根据两传感器通过同一光隙的时间ti与同一传感器通过两个相邻光隙的时间tj的比值来计算弹丸通过两个传感器的滚转角。
1.2 内测法测量
内测法测量弹丸初始速度和初始姿态主要有利用光学原理、地磁感应原理等测量方法,与传统外测法相比,该方法自主性强,不需要借助发射平台或弹体外部仪器设备,测量精度较高且能及时将所测信息传输给弹体,实时完成弹上弹道解算,是目前常规弹药测量弹丸炮口初始参数的主要发展方向。
1.2.1 内测法测量初始速度
目前典型的内测法测量炮口初始速度的测量方法有光电靶测速和磁感应原理测速法等。
1.2.1.1 光电靶测速
光电靶测速是利用光电转换原理,在炮管的一定位置安装两个大小、形状相同的装置,两装置间的距离一定且可精确测得,每个装置主要由若干光敏二极管和发光二极管组成,上电后,发光二极管全亮,光敏二极管敏感到发光二极管发出的光时,光敏二极管导通。弹丸内部装有信号处理电路和控制电路,其飞行穿过第1个装置时,弹丸遮住部分或全部光线,光敏二极管敏感到的光强度发生变化,转化为电信号启动处理电路中的计数单元开始计数,随后穿过第2个装置时光敏二极管敏感到的光强度随之发生变化,转换为电信号停止计数,从而可得通过两装置间的时间(ΔT)[7]。由于两装置的距离L相对弹丸飞行速度来说很小,可将弹丸通过两装置的运动近似为匀速运动,由匀速运动公式可得弹丸飞出炮口的初始速度为:
(1)
光电靶种类较多,按测试的参数可分为光电测速靶和光电立靶。光电测速靶按光源又可分为使用自然光源的天幕靶和使用人工光源的光幕靶,其中,天幕靶按测试方式又可分为水平天幕靶、仰角天幕靶。其典型代表有GD-79、TMB-1、JYJ-90型水平天幕靶和自带光源的XGK-91型光幕靶。
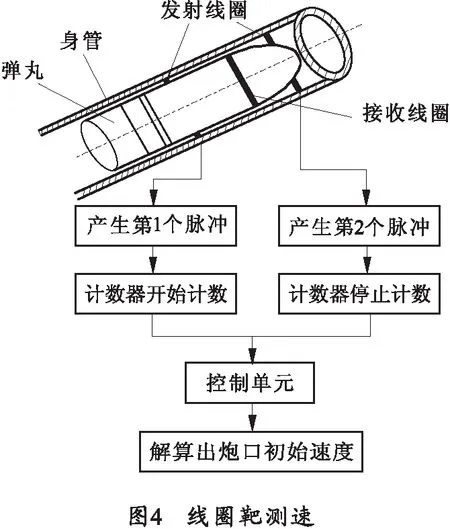
磁感应原理测速可分为线圈靶测速和磁阻传感器测速。线圈靶测速又可分为单线圈靶测速和双线圈靶测速,不同之处是单线圈靶测速需将弹头磁化,而双线圈靶测速不需将弹头磁化。双线圈靶测速和光电靶测速都属于区截法测速,所不同的是线圈靶测速中的发射和接收线圈由一定匝数和层数的线圈构成,两个发射线圈安装于炮管内,一个接收线圈安装在弹丸内的引信中,如瑞士厄利空·康特拉夫斯公司研制的AHEAD弹。其工作流程图如图4所示,弹丸分别穿过两线圈时,接收线圈的磁通量发生变化,产生感应电动势,进而产生两个不同的电压脉冲信号,该信号经放大、整形后作为计时器开始、停止计时信号来计算弹丸穿过两线圈的时间,利用公式(1)求得弹丸炮口初始速度[8-9]。
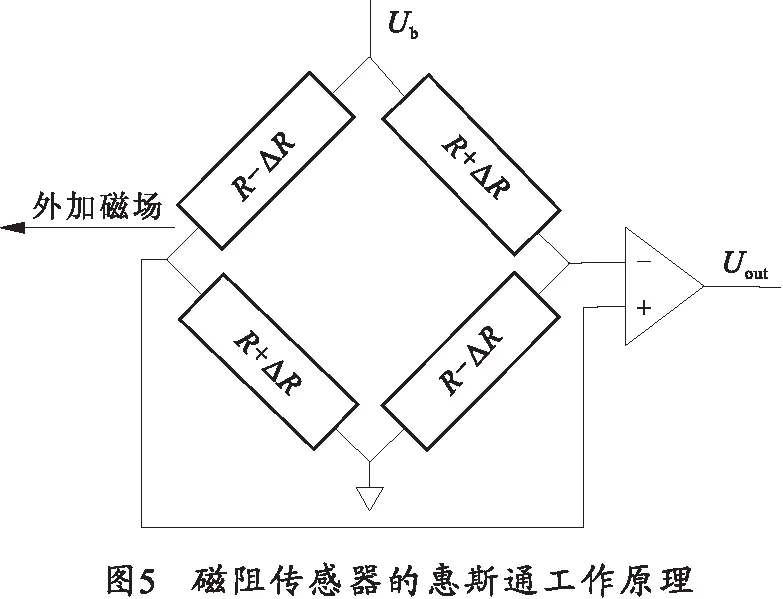
磁阻传感器主要通过惠斯通电桥来完成工作,该电桥由4个玻莫合金制成的电阻组成,如图5所示。玻莫合金是典型的各向异性磁阻效应材料,当玻莫合金的长度方向有一个电流通过时,其宽度方向施加磁场,将导致对角上的两个电阻的内磁化方向朝着电流方向转动,而另两个电阻朝着相反方向转动,这样电阻值的变化将导致外加磁场强度转换成差动电压输出,其输出电压可表示为:
(2)
式中:R为薄膜电阻;ΔR为电阻的变化量;Ub为传感器输出电压。
磁阻传感器测速是将磁阻传感器、信号处理电路和控制电路安装于弹丸内部,弹丸在炮膛内由于磁屏蔽作用磁阻传感器变化很小,其飞出炮口时磁阻传感器可以测得其相对于地磁场的旋转频率,根据此旋转频率即可求得弹丸炮口初始速度为:
v=fDη
(3)
式中:f为弹丸旋转频率;D为炮膛直径;η为炮膛膛线缠角,其中炮膛直径与膛线缠角是已知量[10]。此方法已应用于某大口径底排火箭增程弹测试。
1.2.2 内测法测量初始姿态
内测法测量炮口初始姿态的主要测量方法有磁感应原理测量和光电位置敏感器件测量法等。
1.2.2.1 磁感应原理测量
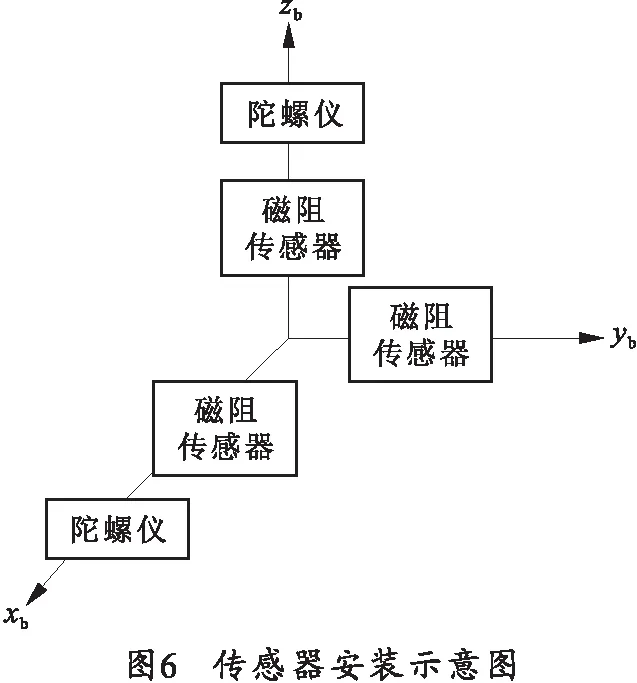
该测量方法利用磁感应原理与惯性器件结合来测量弹丸姿态角,文献[11]提出利用十二加速度计与三磁强计组合测量弹丸姿态角,文献[12]提出旋转弹滚转角的测试,将三维磁阻传感器捷联安装于载体,通过测量载体空间的磁强度,按照一定的算法解算出姿态角。文献[13]提出自旋导弹姿态角的测量方法,采用双轴陀螺仪与三轴磁阻传感器测量姿态。以文献[13]为例具体阐述其原理:选用东北天坐标系为地理坐标系,其捷联安装方式如图6所示。弹丸飞出炮口时,双轴陀螺仪测量所在轴向上的角速率,用式(4)、式(5)求得俯仰角;再根据地磁矢量间的关系,用三轴磁阻传感器的测量值与地理坐标系下的地磁测量值间的关系求得滚转角与航向角。
利用双轴陀螺仪解算俯仰角公式如下:
(4)
ωx(t)cosγ(t)]dt
(5)

1.2.2.2 光电位置敏感器件测量
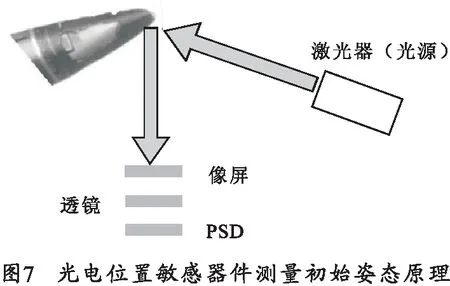
光电位置敏感器件(PSD)测量初始姿态适合于大口径火炮射击条件下使用。其原理如图7所示。弹丸上装有正64面反射镜,激光束发射出的激光经弹丸的反射镜反射后,经长焦距镜头聚焦到光电接收装置的毛玻璃屏上,接收装置的透镜将屏上的光电成像到PSD上,当弹丸旋转一周时,其经过64个周期,由转角测试装置可以知道弹丸的转角,假设弹丸的偏航角、俯仰角不变时,可得弹丸反射在PSD的起始位置;当弹丸的偏航角、俯仰角发生变化时,激光相应射到PSD的像发生变化,由此可知弹丸在PSD上的终止位置,进而可得弹丸在炮口间的偏航角与俯仰角[14]。
2 几种测量方法分析
几种测量炮口初始速度和姿态方法的相同之处是:易受周围环境影响,适应能力差; 仅适用于单一型号的炮弹,不具有普遍性;测量精度不高;原理较简单,但实际操作时需考虑各种因素的影响,不便于操作。
不同之处是:外测法需要借助发射平台或弹体外部仪器设备,测量装置安装在炮管外部,减轻了炮管和弹丸质量;但在测量时,对外界的依赖较大。弹丸高速飞出炮口时伴有火药燃气和浓烈的烟雾,采用激光原理测速时火药燃气和烟雾会影响光线的反射,且火药颗粒也会产生光学效应,影响炮口初始速度的测量。太阳方位角原理测量姿态时利用太阳光线,价格便宜,可用于外弹道高g值的姿态测量,适用于旋转弹的滚转角测量,但只能在光线良好的白天使用,且传感器形成的视场常因炮口烟雾而影响测量精度;多普勒原理雷达测速装置,如CS-2毫米波雷达,其测量精度可达0.1%,测量简单、快速、精确,但该装置价格昂贵,容易产生明显的电测辐射而暴露自己,不适用于实战中,且像多管高射速舰炮,由于其射速高,炮口区有电离气体和烟雾存在,使微波雷达在炮口无法正常工作。
内测法相对外测法在技术上有一定的改进,其自主性较强,能实时完成弹道解算,为后续弹道解算提供初值,在一定程度上提高了测量精度,但现有方法也存在着不足。例如光电位置敏感器件测量姿态角时其精度在±0.5°之间,最大误差小于±1°;光电靶测量速度,其成本低、布靶简单、维修方便,最大测速可达2 000 m/s,相对误差精度≤0.3%,但这两种光电测量姿态、速度的方法都易受周围光线的影响,弹丸飞出炮口时伴有的烟雾颗粒也会影响光敏器件的正常工作,所得信号常因过零检测提取困难而影响测量精度。线圈靶中的双线圈靶测速经常被用于靶场试验,该测量方法可避免弹丸中的引信在发射与飞行中与火控系统的通讯,可靠性较好,不受气候和光线强弱等条件的限制,测速精度相对误差在0.4%~0.6%之间,经过初速修正后误差≤0.27%,但线圈相对比较脆弱易损,对旋转弹来说更不利。磁阻传感器测速是将磁阻传感器安装于弹丸内,不会破坏炮管结构,受弹丸飞出炮口时所伴随的各种物理化反应影响较小,测量精度可达0.42%,该测量方法主要是利用弹丸飞出炮口时磁阻传感器测量其相对于地磁场的旋转频率,此方法较适用于旋转弹。磁感应原理测量姿态时经常将磁阻传感器与惯性器件相结合来使用,能实时测量弹丸姿态,一般情况下,测量精度误差不超过1°,但惯性器件在较长时间工作时误差随时间积累,且弹药在发射过程中的高旋转使得惯性器件过载而无法正常工作,飞行中弹轴与地磁矢量平行或近似平行时也会出现奇异点,此时解出的姿态误差相对较大。
综合比较各种测量方法可知,从精度上来说,在测量速度方面,毫米波雷达的精度最高,但其是外测法,不能将所测信息实时传输给载体,完成弹道解算,内测法中光电靶和双线圈靶精度误差均不超过0.3%,但光学原理测量炮口初始参数易受天气和弹丸飞出炮口时伴随的各种物理化学反应的影响,其可操作性较差。在测量姿态方面,两者的误差均不超过1°,但磁感应原理测量炮口初始参数受天气、弹丸飞出炮口时复杂因素的影响较小,且其各测量方法存在的问题可通过其他方法给予解决,例如将线圈靶测速与磁阻传感器结合起来测量炮口初始速度与姿态,其中,直接利用磁阻传感器来测量炮口初始姿态:磁阻传感器在炮管内由于磁屏蔽作用其磁强度较小,弹丸飞出炮口时其磁强度瞬间变大而后平稳,可通过控制单元控制磁阻传感器测得的磁强度平稳时的瞬间值来解算姿态;测量初始速度时可将线圈靶中的接收线圈换成磁阻传感器,且将线圈靶测速在结构上进行如下改进:在炮口处安装制退器,两个各参数相同的线圈安装在制退器中,可避免炮管高温对线圈的影响。该方法价格便宜,结构简单,不会破坏炮管结构,体积小,适用性较强,是以后常规弹药制导化发展的主要方向。
3 结 论
弹丸炮口初始速度与姿态是常规弹药制导化研究的主要参数,该参数的准确测量直接关系到外弹道的解算精度,是国内外研究者研究的重点之一。由早期提出的在发射装置外安装一定设备,利用太阳方位角原理、光学原理和高速摄影机来记录弹丸飞出炮口的轨迹来计算速度和姿态,这些方法受周围环境影响较大,误差也较大;国外研究者研制出多普勒原理雷达测速,其利用弹丸的运动速度与产生的多普勒频率得出弹丸炮口速度,该方法几乎能测量各种弹径的速度,精度较高,在当时得到广泛的应用,但该方法不能实时将所测数据传输给载体来完成弹丸弹道解算。
随后提出的内测法将单片机和控制单元安装于弹丸内部,能实时将所测数据传输给载体完成弹丸弹道解算。比较各种测量方法,考虑到实际应用中弹丸复杂的飞行环境和可操作性,磁阻传感器具有灵敏度高、体积小、功耗低,较长时间工作时误差不随时间积累等特点;线圈靶测速将两个线圈安装于制退器中,不会破坏炮管结构,也不会损毁线圈,将这两种方法有效的结合,能利用两种测量方法的优点,提高测量精度,为弹丸炮口初始参数的研究发展方向提供参考,具有实际指导意义。
[1] 高峰, 张合. 基于基准角和补偿角的常规弹药滚转角磁探测算法研究[J]. 探测与控制学报, 2008, 30(5):11-15.
GAO Feng, ZHANG He. Algorithm of roll angle determination of conventional ammunitions based on benchmark angle and compensation angle[J].Journal of Detection & Control, 2008, 30(5):11-15.(in Chinese)
[2] 王斌. 迫击炮弹在膛内运动姿态、速度测试方法初探[J]. 兵工标准化,1999 (4):18-20.
WANG Bin. Exploration of mortal motion in bore attitude、velocity measurement method[J]. Ordnance Standardization,1999 (4):18-20.(in Chinese)
[3] 吴志林,孔德仁,赵润贵. 双弹头多普勒测速研究[J]. 南京理工大学学报,1999, 23(5):430-433.
WU Zhi-lin, KONG De-ren, ZHAO Run-gui. Dopple velocity measurement of duplex ammunition[J]. Journal of Nanjing University of Science and Technology, 1999, 23(5) :430-433.(in Chinese)
[4] 马百双,刘昌锦. 几种典型炮口初速测试方法比较[J].四川兵工学报,2011, 32(11):53-55.
MA Bai-shuang, LIU Chang-jin.Comparison with first speed measure method for some sorts of typical cannon[J].Journal of Sichuan Ordnance, 2011, 32(11):53-55.(in Chinese)
[5] 孙帅,宋玉贵. 弹道跟踪转镜成像研究[J].光电技术应用,2010, 25(5):3-5.
SUN Shuai,SONG Yu-gui. Study on the image tracked by mirror in trajectory[J]. Electro-optic Technology Application, 2010, 25(5):3-5.(in Chinese)
[6] 桂延宁,杨燕. 基于太阳方位角原理的炮弹飞行姿态遥测[J]. 兵工学报,2003, 24(2):250-252.
GUI Yan-ning,YANG Yan.Telemetering for the attitude of projectile in flight based on the principle of solar aspect angle[J].Acta Armamentarii,2003, 24(2):250-252.(in Chinese)
[7] 卢易枫,宋寅卯,李洁. 子弹测速系统设计[J].工业控制计算机,2006, 19(1):55-57.
LU Yi-feng, SONG Yin-mao, LI Jie. Design about bullet’s speed detection[J].Industrial Control Computer, 2006, 19(1) :55-57.(in Chinese)
[8] 丁毅,王林,王鹏,等. 炮口初速测量技术[J].四川兵工学报,2011, 32(3):35-37.
DING Yi, WANG Lin, WANG Peng, et al. Muzzle velocity measurement technique[J].Journal of Sichuan Ordnance, 2011, 32(3): 35-37.(in Chinese)
[9] 杨昭,王利,纪霞. 弹载自测方法研究[J]. 弹箭与制导学报,2006, 26(4):179-180.
YANG Zhao, WANG Li, JI Xia. The study on the muzzle velocity self-measuring in the projectile[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2006, 26(4): 179-180.(in Chinese)
[10] 王伟,赵高波,霍鹏飞,等. 一种利用磁阻传感器的炮 口速度测量方法[J].西安工业大学学报,2008, 28(2):129-132.
WANG Wei, ZHAO Gao-bo, HUO Peng-fei, et al. Application of magnetoresistive sensor to measuring the muzzle velocity[J]. Journal of Xi’an Technological University, 2008,28(2):129-132.(in Chinese)
[11] 李奕恒. 高速旋转弹姿态参数测试技术研究[D]. 太原:中北大学,2008.
LI Yi-heng. Research on attitude measurement of high-speedrotary missile[D]. Taiyuan: North University of China, 2008.(in Chinese)
[12] 史连艳. 基于地磁测量的弹体滚转角测量系统设计[J].电子设计工程,2009, 17(3):4-6.
SHI Lian-yan. Design of roll angle measuring system of rocket body based on geomanetism measurement[J].Electronic Design Engineering, 2009, 17(3):4-6.(in Chinese)
[13] 代刚,李枚,苏伟,等. 自旋导弹捷联式陀螺/地磁姿态测量方法[J].中国惯性技术学报,2010, 18(6): 702-705.
DAI Gang, LI Mei, SU Wei, et al. Strapdown gyroscope magnetometer attitude measurement method for spinning missile[J]. Journal of Chinese Inertial Technology, 2010,18(6):702-705.(in Chinese)
[14] 王恒,李杰,寇丽丽,等. 一种基于PSD的弹丸炮口姿态测试新方法[J].电子设计工程,2010, 18(4):26-27.
WANG Heng, LI Jie, KOU Li-li, et al. New method of projectile muzzle posture testing based on PSD[J]. Electronic Design Engineering, 2010, 18(4):26-27.(in Chinese)
