高炮刚柔耦合动力学仿真及二次开发研究
2013-11-21高跃飞曹红松徐凤军
柯 彪,高跃飞,曹红松,贾 强,徐凤军
(1.中北大学 机电工程学院,山西 太原 030051;2.西北机电工程研究所,陕西 咸阳 712099)
高炮作为一种连发射击武器,影响弹丸起始扰动的最突出因素是炮口处的射击振动,该振动响应主要取决于自动机的射击载荷激励和炮架、车体的固有振动特性。高炮身管一般较长,属于细长杆件,且受力状态接近于悬臂梁,因而将其进行柔性处理更能反映其动力学特性。由于发射过程中火炮各部分的振动响应相互耦合,脱离全炮系统而研究柔性身管与弹丸作用对射击精度的影响是远远不够的。为此,笔者针对双管高炮结构进行了全炮建模,考虑柔性身管与刚性弹丸之间的相互作用,来进行高炮连续射击的动力响应分析。同时,基于机械系统动力学分析软件ADAMS进行了二次开发,将上述的高炮刚柔耦合发射仿真全过程进行了菜单和对话框的定制,在一定程度上对全炮虚拟样机进行了封装,实现了交互式的全炮仿真,为火炮产品的虚拟设计提供了必要的技术基础。
1 全炮虚拟样机模型的建立
以自行双管高炮为例,该炮有两个独立浮动自动机,左、右身管发射时间间隔约为50 ms,底盘为越野汽车,射击时由液压驻锄提供支撑。射击时,自动机进行输弹、关闩、闭锁、击发动作,火药燃烧推动弹丸运动;当弹丸经过导气孔后,膛内气体进入导气室,作用于活塞,带动炮闩组件后坐压缩输弹簧,并撞击炮闩缓冲器缓冲,同时浮动部分由液压阻力和浮动簧消耗或存储能量;此后,自动机顺序完成其他发射动作。
1.1 全炮拓扑结构分析
由于火炮发射时的运动和受力十分复杂,在建立动力学分析模型时需要进行简化。
1) 将底盘划分为3个部分:如车头,后车箱体及车体部分。其中,车体部分包括车架、悬挂部分、轮胎和液压缸等。
2) 射击时整车由液压驻锄支撑,因此将悬挂部分和车轮简化为刚性连接,液压驻锄缸体也与车体刚性结合,液压缸与液压支撑轴之间用线性弹簧阻尼器和移动副来模拟驻锄的工作。
3) 液压驻锄轴与支撑板之间通过球形副连接,同时支撑板与地面之间通过六自由度的轴套力(Bushing)柔性连接。
4) 高低机和方向机利用旋转副和一定刚度的扭簧来模拟,扭簧刚度和阻尼需通过经验值来确定。
5) 将自动机简化为炮箱与炮闩的二自由度系统,同时添加炮闩座与炮箱之间的摩擦而忽略其他摩擦力。
6) 忽略弹丸旋转,在刚性弹丸与柔性身管之间添加接触,柔性身管与炮箱前箱体配合面之间添加接触,弹丸底部施加弹底作用力,用以模拟弹丸发射过程中整个弹丸(弹丸定心部)与身管之间作用和身管与炮箱的接触作用。
在对模型进行大量必要简化和添加等效约束副[1]后,就可以建立该火炮的多体刚柔动力学模型。仿真前,利用ADAMS对模型进行了验证,共有52个自由度,并无多余约束。
全炮的拓扑关系如图1,全炮几何模型如图2。


1.2 柔性身管模型
采用三维建模软件UG对左身管进行实体建模并必要的简化后,利用有限元分析软件ANSYS在身管前后端面中心创建刚柔连接标记点,并建立有限元模型。标记点创建完毕后,身管前端标记点和刚性区域如图3所示。

在ADAMS 模型中通过新建的标记点建立身管与炮口制退器、炮箱前箱体的刚柔连接。身管与炮箱配合的接触面间添加接触,弹丸与柔性身管间也添加接触[2]。利用ADAMS的默认选项将柔性体的1~6阶刚性模态失效,同时使部分高频率的模态进行失效,比较各模态的振型,抑制振动比较剧烈而与实际相差较大的扭转和压缩模态,确定用于计算的模态如表1所示。

表1 被激活的所有模态阶数与频率
2 全炮虚拟样机关键载荷的施加
由内弹道计算、自动机循环分析和浮动机工作特点,可计算得到炮箱、炮闩和弹丸的受力。这些部件是全炮发射过程的主要受力物体,他们的受力是全炮发射响应的主要激励[3]。这些力有弹丸轴向受力、炮闩部分受力(包括导气室压力、输弹簧力、炮闩缓冲器作用力、气室活塞复位簧作用力及与炮箱导轨的摩擦力等)、炮箱部分受力(包括炮膛合力、浮动簧力、浮动机液压阻力、复进缓冲簧力及与摇架导轨的摩擦力等)。
气体作用力可利用内弹道计算的p-t曲线,根据各力的理论计算公式求出,并将数值数据导入ADAMS中进行插值拟合,再编写时间控制函数进行施加。下面以发射前3发弹丸为例说明几个关键载荷在ADAMS中的施加过程。
2.1 浮动机液压阻力
设A为流液孔面积,复进和后坐过程中A值是不同的。在后坐过程中,单向阀是打开的,流液口总面积为可调面积、恒定面积及单向阀孔面积之和;在复进过程中,单向阀被关闭,流液口总面积为可调面积和恒定面积之和。
浮动机液压阻力可表示为:
(1)
式中:A0为活塞作用面积;A为流液孔面积;ρ为液体密度;K1为液压阻力系数;v为后坐部分速度。
在ADAMS中,将后坐部分速度测量值V通过SENVAL()函数传递到液压阻力控制方程中。例如左炮的液压阻力控制函数为:
if(SENVAL(V)-0:-2477.2*SENVAL(V)**2,-2 477.2*SENVAL(V)**2,35 100.597*SENVAL(V)**2)
其中,数值2 477.2和35 100.597分别为后坐和复进时由式(1)计算得到的系数。
2.2 导气室压力
导气式压力采用布拉经验公式:
Fq=Shpdexp[-(t-tq)/b]{1-exp[-a(t-tq)/b]}
(2)
式中:pd为弹丸通过导气孔瞬间膛内火药气体压力;Sh为导气活塞面积;b为时间参数,取决于膛内压力变化规律的函数;a为结构参数,取决于导气装置结构参数的系数;tq为弹丸经过导气孔时的时间。
在ADAMS中,1个身管单个导气室内火药气体对活塞作用的控制函数为:
if(time-(t_q):0,0,if(time-(T):252360*(exp(-400*(time-(t_q)))-exp(-400*(1+if(time-(t_ks):0.743,0.743,2.42))*(time-(t_q)))),0, ))
其中,t_q为弹丸过导气孔的时间;T为该炮的射击循环周期时间;t_ks为开锁时间;数值0.743、2.42分别为开锁前后计算得的导气室结构参数a的值。
以上载荷控制函数中的T、t_q和t_ks是变量,可以通过定制的用户界面进行修改,其他的控制函数可以类似把关键参数作为变量处理。
3 交互式仿真控制的实现
为了提高全炮动力学仿真的效率与质量,基于ADAMS系统进行了二次开发,定制了整个仿真的操作对话框平台,实现虚拟样机模型参数化、脚本仿真界面化和后处理图形查看定向化等功能。
主菜单分隔为3个部分,介绍如下:
1)第1部分主要分为Demonstration Information与Pre Setting quan pao,其功能分别实现全炮仿真帮助的显示和射速、左右炮发射耦合时间、射击循环周期的预先设定。
2)第2部分功能实现:通过Bodies Parameter可以实现对车部分、上架、摇架、浮动机、自动机各部分进行物理特性参数(如质量、质心和主惯性矩)的重新修改和设定,还可以通过Build new菜单选项在原有模型基础上新建几何实体和添加柔性体;Connectors和Motions菜单栏可以调用汉化了的常用系统功能实现约束副和驱动的添加,另外Forces Parameter 菜单可以对虚拟样机模型中的主要部分(底盘、方向机、高低机、自动机和浮动机)相关的Spring力和Bushing力的刚度、阻尼和预压力值的修改,这样可以通过输入实测的刚度和阻尼进行仿真,进一步提高精度。同时,对于变射频发射仿真,通过修改各主要部件间作用的刚度和阻尼是很容易实现的,也可以为后续的优化设计提供方便;
3)第3部分为Simulation Control、Post Processor和Animate results,主要是仿真的参数控制、后处理的定制和仿真结果动画的演示,可以实现身管的刚柔替换、多工况的自由变换(定制对话框可以实现方向角和高低角的任意角度值控制)和左右炮射弹数的脚本仿真控制[4]。
修改约束刚度、阻尼和预载压力的关键代码,以修改bushing参数为例说明如下:
force modify element_like bushing &
bushing_name=zuo_qian_bushing &
stiffness=$stiffness &damping=$damping & force_preload=$force_preload……
4 多工况仿真算例
4.1 仿真计算及结果
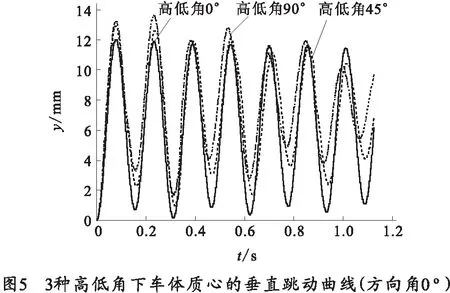
以某车载双管自行高炮作为研究对象,在规整路面上方向角0°、45°、90°与射角0°、45°、90°共9种工况下,结合定制仿真平台,采用脚本程序控制单管各10连发射击的弹炮刚柔耦合发射情况进行了仿真计算,得到浮动运动曲线(如图4)及车体和身管炮口扰动曲线(如图5~图6)。


4.2 结果分析
1) 浮动稳定性分析。在方向和高低角均为0°时,单管10连发弹炮刚柔耦合发射时浮动曲线特征点值与实测值接近,浮动部分运动稳定,符合浮动自动机的设计要求[5],如表2所示,说明建立的全炮虚拟样机模型较真实。

表2 自动机运动位移特征点对比 mm
2) 车体稳定性分析。由图5和图6知,车体水平晃动量最大为332.2 μm,即车体水平方向振动响应较小,且随高低角变化趋势是90°时最大,45°时次之,0°时最小;车体垂直跳动量最大为13.6 mm,明显比水平晃动量大,即车体的垂直振动响应比水平方向振动剧烈,但所有振动幅值都在高炮的控制范围内。
3) 身管炮口扰动分析。不同高低角下,均是身管水平横向的扰动大于垂直方向,分析原因是:一方面由连发射击时误差累积造成,另一方面自动机部分运动过程产生了一定的横向扭矩。不同工况下,高低角不同导致浮动部分质心位置不同,振动响应和频率也会不同,结果如图7~图8和表3所示。


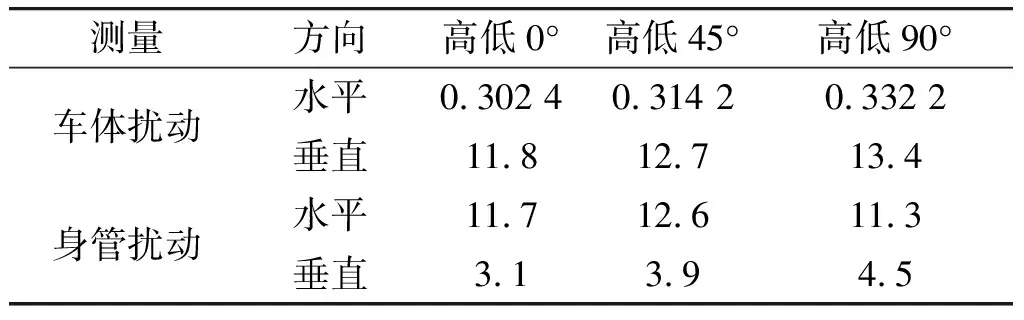
表3 10连发射击时车体与身管扰动幅值(方向角0°) mm
5 结论
将火炮机械系统仿真技术同CAD技术、FEA(有限元分析)技术等结合在一起,实现了高炮全炮虚拟样机的建立。工程设计人员可以对该高炮虚拟样机进行反复试验(模拟)和测试(分析),更好更全面地了解影响射击精度的因素,优化方案,指导设计,进一步提高产品的性能。同时还针对全炮虚拟样机定制出专用于该高炮的刚柔交替全炮发射仿真的菜单和对话框,进一步封装了虚拟样机,便于将该多体动力学仿真模块集成到工厂数字化设计平台下,为未来工厂的数字化产品设计、试验和测试提供了一定的参考价值。
参考文献(References)
[1] 曾晋春.车载式火炮刚柔耦合发射动力学研究[D].南京:南京理工大学,2010.
ZENG Jin-chun. Dynamics research of the rigid-flexible coupling firing for vehicle-mounted gun[D].Nanjing:Nanjing University of Science and Technology,2010.(in Chinese)
[2] 李军,邢俊文,覃文杰.ADAMS实例教程[M].北京:北京理工大学出版社,2002:201-206.
LI Jun,XING Jun-wen,TAN Wen-jie.Tutorial of ADAMS examples[M].Beijing:Beijing Institute of Technology Press,2002:201-206.(in Chinese)
[3] 杨军荣,何永,米粮川.基于虚拟样机技术的双管火炮耦合发射动力学仿真[J].南京理工大学学报,2006,30(4):439-443.
YANG Jun-rong,HE Yong,MI Liang-chuan. Dynamics simulation of coupling firing for twin-tube gun based on virtual prototype technique[J].Journal of Nanjing University of Science and Technology,2006,30(4):439-443.(in Chinese)
[4] MSC Sortware.ADAMS/View高级培训教程[M].邢俊文,陶永忠,译.北京:清华大学出版社,2004:32-41.
MSC Sortware.Advanced teaching tutorial of ADAMS/View[M].XING Jun-wen,TAO Yong-zhong,translated.Beijing:Tsinghua University Press,2004:32-41.(in Chinese)
[5] 冯长根,温波,王茂林,等.高炮发射动力学仿真技术研究[J].兵工学报.2001,22(2):146-148.
FENG Chang-gen,WEN Bo,WANG Mao-lin,et al.A study on the dynamics simulation of anti-aircraft guns on fire[J].Acta Armamentarii,2001,22(2):146-148.(in Chinese)