基于RFID技术导盲机器人室内路径规划的研究
2013-11-19靳祖光
陈 超, 唐 坚, 靳祖光
(江苏科技大学 机械工程学院, 江苏 镇江, 212003)
随着机器人技术的飞速发展,研发导盲机器人成为辅助盲人正常生活的最好选择之一[1].对于自主移动机器人来说,能够规划出自己的运动路径并能够执行该运动路径是机器人自主行为的一个重要体现.导盲机器人主要的服务对象是盲人或视力受损伤的人,因此路径规划这个功能对导盲机器人来说尤其重要[2].
目前,导盲设备大致分为以下3类:① 手杖类行进辅具;② 穿戴式行进辅具;③ 移动式行进辅具[3].这些导盲设备中大部分以避障为主要实现目的,不具有路径规划功能.少数具备路径规划功能的导盲设备往往需要大量的资金投入.文中以自主设计的导盲机器人为实际应用背景,依据射频识别模块在数据获取方面的优势,用极低的成本来实现机器人的路径规划功能.
1 导盲机器人结构
机器人主体主要由4层亚克力板搭建而成,直径为0.5 m,其上主要安置了步进电机、避障传感器模块、射频模块、语音识别模块、PLC控制模块及操纵手杆等部件.机器人车体配置方式采用经典的三轮差动结构,包含两个驱动轮和一个万向轮,两个后轮为驱动轮,前轮为万向轮,起辅助支撑作用,使整个车体的重心位于由轮子和地面的接触点所构成的三角形内,从而增加车体行走时的稳定性和定向性.机器人转向主要由两只后轮的转速差来实现,当两轮转速大小相等方向相反时,可实现整个车体的灵活回转.机器人的整体结构如图1所示.

1.操纵手柄;2.伸缩手杆; 3.手杆转台;4.射频通信及语音识别模块;5.超声波避障传感器;6.PLC控制模块; 7.亚克力板;8.驱动轮;9.万向轮;10.步进电机;11.步进电机驱动器;12.开关电源;13.红外线避障模块.
图1机器人整体结构
Fig.1Integralstructureoftherobot
2 导盲机器人室内定位
机器人的自定位是指确定其在工作环境(一般指二维环境)中的全局坐标和运动方向.由于射频系统(RFID)可以在几毫秒内获得厘米级的数据精度,文中导盲机器人采用一个RFID阅读器与多个标签组成射频识别系统,将阅读器放置在导盲机器人上(即阅读器的位置就是机器人的位置),标签粘贴在障碍物上,采用读写器多路存储的通讯方式,在阅读器的应答范围内,有多个有源标签的数据同时传给阅读器,使得阅读器阅读标签中所存储的障碍物特征点坐标、标签的坐标值和阅读器与标签之间的信号强度值(RSSI)等信息.当阅读器与标签的距离不一样时,接收标签发回的信号强度值也就不一样了.即根据阅读器接收的信号强度值,得到标签与导盲机器人的相对距离[4]如下:
d=10(|RSSI|-A)/(10*n)
(1)
式中:A为阅读器与标签相距1m时的信号强度值(经多次测量,文中A的取值为-45.8 dBm);n为环境对信号的衰减系数(经多次测量,文中n的取值为3).
在定位过程中,标签对未知机器人的位置都有影响力.标签与机器人之间的相对距离越小其影响力越大,该标签对机器人位置的决定权越大.如图2所示,假设t时刻阅读器收到了4个信息标签的信号,4个信息标签的坐标分别是(x1,y1),(x2,y2),(x3,y3),(x4,y4),它们到导盲机器人的距离分别为d1,d2,d3,d4.可以看出d1 图2 定位方法Fig.2 Location method 根据Tag1,Tag2,Tag4到阅读器的距离d1,d2,d4可以求出t时刻机器人的坐标st(xs,ys): (2) 用同样的办法可以求出t+1时刻的机器人的坐标st+1(xs+1,ys+1),从而得到机器人运动的方向角θ,如公式(2)所示,确定了机器人的方位.机器人从起点运动到终点的过程中,可以根据标签不断地检验和调整自己的运动方向,将定位误差降到最低. (3) 在地图创建中,将所有实际的障碍物等效成投影在平面内的多边形集合(图3),只要记录下多边形的特征点就记录下了该障碍物.由于机器人车体被简化为其转动中心,成为二维坐标系下的一个点,所以将障碍物根据机器人的尺寸和测量误差进行膨胀.文中障碍物以(w/2+a)尺寸进行膨胀.其中,w是机器人的直径,a是机器人的定位误差(文中a为0.15 m).对于一些不规则或圆形的障碍物,将其膨胀为规则的几何图形,以便于路径规划. 图3 环境模型示意图Fig.3 Diagram of environment model 导盲机器人的环境创建主要借助于射频模块来实现的.首先,正常人通过手柄控制机器人在室内环境中走一遍[6].机器人运用车载射频模块阅读器阅读障碍物上粘贴的标签信息,获得该障碍物数据信息(包括障碍物特征点等);其次,通过膨胀规则将得到的障碍物信息进行膨胀;最后将膨胀后的坐标值存入二维数组,其中二维数组的下标为膨胀前的坐标值,便于寻找,具体流程如图4,即完成了障碍物地图的创建.机器人具有自学习功能,进入陌生环境时,只要重复上述过程,就可以创建新的障碍物地图,提高了导盲机器人的实用性. 图4 环境地图创建流程Fig.4 Flow chart of establishing environmental map A*算法在人工智能中是一种典型的启发式搜索算法,结合了启发式方法和形式化方法.它通过一个估价函数来估计每个最佳节点的权值,并解出状态空间搜索的最短路径.文中通过射频模块和语音模块等搜集环境信息,结合A*算法的思想,提出了一种路径规划算法: 1) 运用上述环境地图创建算法,创建二维障碍物地图. 2) 通过三角定位算法获得机器人当前方位作为起点S,以语音模块的语音输入功能输入目标点G. 3) 在二维障碍物地图中,求取与线段SG相交的障碍物,本算法下面将只考虑与线段SG相交的障碍物. 4) 从起点S开始,将起始点S加入开启列表(开启列表就像一张购物清单,路径可能会通过它包含的点,也有可能不会),寻找开启列表中f值最低的点,作为当前点.其中f值为g值和h值之和,g值为从起始点S沿着产生的路径运动到当前点所走过的距离;h值是当前点到目标点G的欧式距离;若当前点坐标为(xd,yd),目标点坐标为(xm,ym),则有 (4) 5) 把当前点切换到关闭列表(关闭列表中保存所有不需要再次检查的点),并从开启列表中删除该点.搜索当前点能不经过障碍物而直接到达的障碍物特征点,判断该特征点是否在关闭列表中,如果在则略过此点;反之判断该特征点是否在开启列表中,若不在则以当前点作为该特征点的父节点算出g,h和f值并将其加入到开启列表中;反之则以g值作为参考检查新的路径是否更好(g值越小则路径越优),如果更好则把这一点的父节点改为当前点,重新计算这一点的g,h和f值. 6) 判断开启列表是否为空,若是则路径不存在,算法结束. 7) 判断是否将目标点加进了开启列表,如果是则路径找到,算法结束;反之转到步骤4). 8) 保存路径.从目标点开始沿着每一点的父节点移动直到回到起始点,并将经历过的点保存成数组的形式,颠倒该数组的顺序,则该数组就是路径. 该路径规划算法以障碍物膨胀,增强了机器人对环境不确定信息的适应;依靠射频模块和语音模块,精确地得到室内环境信息,完成了机器人定位信息和目标点信息的获取;障碍物地图只存入障碍物特征点,相对于同样存入数字地图的栅格算法,最大限度的降低了存入地图需要的存储空间,降低成本且在路径搜索效率上优于栅格算法. 栅格算法中栅格大小的选择直接影响着控制算法的性能.栅格选得小,环境分辨率小,但抗干扰能力弱,环境信息存储量大,决策速度慢;栅格选得大,抗干扰能力强,环境信息存储量小,决策速度快,但分辨率下降,在密集障碍物中发现路径的能力弱[7].文中算法很好的解决了这个问题.首先,障碍物地图只存入障碍物特征点,与栅格选择小的栅格算法相比,降低了环境信息存储量的同时又不降低环境分辨率,而且由于环境障碍物的膨胀使得该算法的抗干扰能力得到加强;其次,利用现有的数学定理:在平面障碍物为多边形的情况下最短路程一定是一条由起始点经过各可视障碍顶点到达终点的一条折线.根据这个数学定理,文中算法在搜索路径时,只考虑与起始点和目标点连线相交的障碍物,在保证搜索路径最优或次优的同时进一步降低了搜索算法处理的数据量,提高了搜索效率,所以该算法优于栅格法. 采用相同的障碍物环境,分别将文中路径规划算法和栅格法在MATLAB中进行对比仿真实验,得到的路径的距离相差不大,但文中算法搜索时间明显少于栅格法,搜索效率优于栅格法.多次实验统计结果显示,文中算法搜索时间最小值、最大值及平均值分别为0.479 0,0.763 0,0.620 5 s,栅格算法则分别为1.185 0, 1.566 0,1.375 5 s.图5是文中算法与栅格算法得到的有效路径.由此可得,文中算法优于栅格算法. a) 文中算法搜索到的路径 b) 栅格法搜索到的路径 利用上述算法编程做了实验,试验场地和导盲机器人如图6.在机器人行走过程中,通过语音输入目标点坐标,系统将立即规划出一条从机器人当前位置到目标点的最优或次优路径,并沿该路径行走直至到达目标点,通过实验表明,基本上满足了导盲的要求. 图6 导盲机器人室内环境实验Fig.6 Indoor environment experiment of seeing eyes robot 1) 结合射频模块和语音模块等设备在数据获取上的优势,利用射频模块获取环境信息,运用三角定位算法确定导盲机器人在环境中的位置. 2) 运用障碍物膨胀和等效投影的思想创建障碍物地图,以保证路径规划算法搜索出的路径的可行性. 3) 运用语音模块获取目标点信息,结合A*算法的启发式搜索方式找出一条连接起始点和目标点的路径;实验表明,该算法在提高搜索效率的同时,保证了搜索出的路径的平滑性和可通行性. 参考文献(References) [1] 韩雪峰.导盲机器人[D].黑龙江哈尔滨:哈尔滨工程大学,2009:1-7. [2] 王志文,郭戈.移动机器人导航技术现状与展望[J].机器人.2003,9(25):470-474. Wang Zhiweng,Gou Ge.Present situation and future develepment of mobile robot path planning technology[J].Robot,2003,9(25):470-474.(in Chinese) [3] Burgard W, Cremers A, Fox D, et al.Experiences with an interactive museum tour-guide robot[J].ArtificialIntelligence, 1999,114:3-55. [4] 刘晶.RFID技术在移动机器人同步定位中的应用[J].中南民族大学学报,2008,27(3):84-87. Liu Jing.Application of RFID technology in SLAM[J].JournalofSouth-CentralUniversityforNationalities, 2008,27(3):84-87.(in Chinese) [5] Liu Jing,Yang Po.A localization algorithm for mobile robots in RFID system [C]∥SSRR.2007InternationalConferenceonWirelessCommunications,NetworkingandMobileComputing.United States:Institute of Electrical and Electronics Engineers Computer Society,2007:2109-2112. [6] Kiyosumi Kidono,Jun Miura,Yoshiaki Shirai.Autonomous visual navigation of a mobile robot using a human-guided experience[J].RoboticsandAutonomousSystems,2002,40:121-130. [7] 许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件.2011,3(28):220-236. Xu Sijun,Cao Qiying.A visibility graph based path planning algorithm for mobile robot[J].ComputerApplicationsandSoftware,2011,3(28):220-236.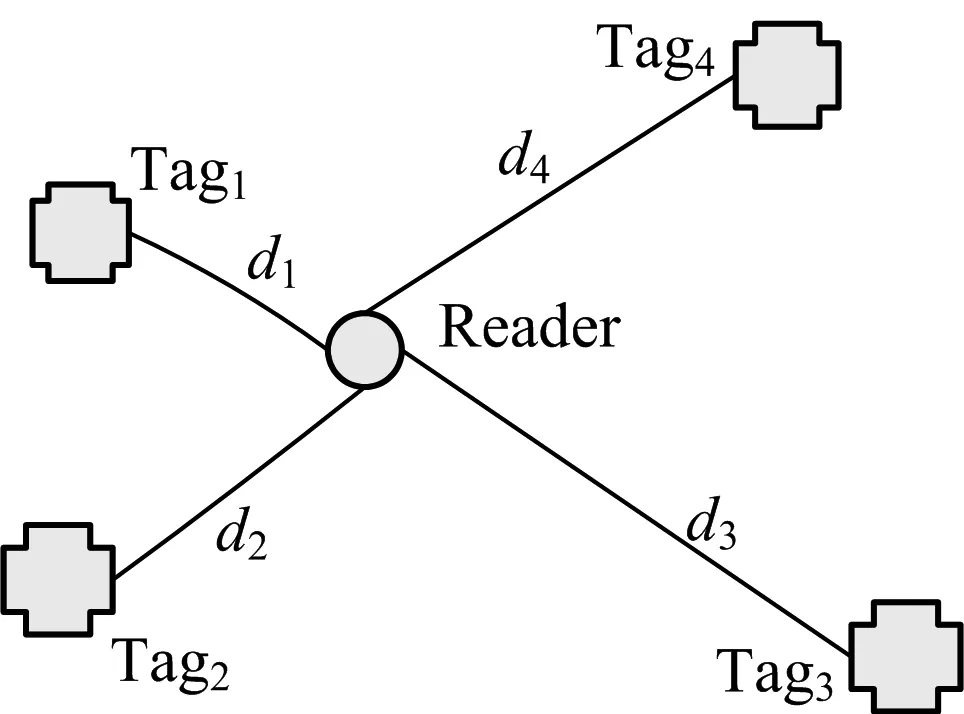
3 路径规划
3.1 环境地图创建


3.2 路径规划算法
3.3 算法性能分析
4 实验调试


5 结论