新型微型管道机器人结构设计及其运动可行性分析
2013-11-19朱永梅孙小艳
朱永梅, 孙小艳, 张 超
(江苏科技大学 机械工程学院,江苏 镇江 212003)
微型管道作为一种特殊的运输工具无论是在日常生活还是生产中都得到广泛地应用,然而受管道使用可靠性以及管道寿命等因素的影响,管道事故变得越来越常见.基于此,微型管道机器人应运而生.目前,现有的微型管道机器人形式各式各样,按其行走方式可以分为:轮式(包括直进轮式和螺旋轮式)、足式、履带式、张紧式以及蠕动式[1-4]等.
国内外关于微型管道机器人都有相关研究,例如,文献[5]根据蚯蚓生物学的运动机理研制了结构简单的微小管道机器人,该机器人采用步进电机驱动,控制简单;文献[6]设计了一种无缆管道机器人,该机器人由发电部分、支撑轮组件和导向机构三大部分组成,采用高速51单片机AT89S52配合可编程器件(CPLD)EPM7128来进行控制,但此机器人仅限于进行远距离的运行作业;文献[7]设计了蠕动式的微小管道机器人,机器人由微型的直流电动机和微型行星齿轮减速器组合驱动,总体上实现了微型化(φ13 mm×200 mm),但设计的支撑结构不够灵活,控制性能较差;文献[8-9]研制了一种仿尺蠖微小管道机器人,机器人的移动速度随气压值和管道直径的增大而增大,在直径为16 mm的管道内通入气体的气压为2.0 Pa时其速度最大可达50 mm/s.尽管国内外关于微型管道机器人都有一些研究,但是微型管道机器人的设计研究尚未走向成熟,还存在各自的缺陷,并不能适应一定范围或类型的管道.因而,进一步对微型管道机器人进行研究开发势在必行.文中设计了一种微型步进电机驱动的蠕动-张紧式微型管道机器人,综合了蠕动和张紧这两种机器人的优良性能,能够平稳的运行于管径范围为25~40 mm的管道.
1 微型管道机器人总体方案设计
根据具体的设计参数以及实现机器人在复杂管道内行走等设计要求,设计的微型管道机器人主要由三部分组成:前箝位(张紧)机构、后箝位机构以及连续蠕动驱动体(图1).
前后箝位机构为对称机构,主要有步进电动机、丝杠螺母、3个对称分布的张紧轮、越障弹簧以及由连杆组成的呈120o分布的支撑腿,整体呈伞状结构.该部分能够满足微型管道机器人实现基本行走的条件,即形封闭和力封闭(轮腿实现了与管壁的3点支撑),同时它还能实现越障以及适应一定管径变化等功能.

图1 微型管道机器人方案Fig.1 Micro in-pipe robot sheme figure
中间部分为连续蠕动驱动体,该蠕动机构与以往的机械蠕动机构不同.以往所设计的蠕动机构一般为电机带动丝杠螺母分步实现前后箝位机构的前进和后退,蠕动进度异常缓慢.该微型管道机器人的蠕动机构能够实现连续驱动,提高了机器人的运行效率.十字换向节的使用保证了机器人能够顺利地通过弯道,大大提高了机器人的适应能力.
微型管道机器人的运动原理为:前后箝位机构在步进电机带动丝杠螺母的作用下使得各自的3条支撑腿张紧,从而保证3个对称分布的轮子与管壁有一定的附着力,待前后箝位机构张紧后(即与管壁产生约束作用),中间部分的蠕动驱动体开始工作,带动机器人整体连续向前或向后行走.
2 微型管道机器人结构设计
2.1 蠕动驱动体的设计
为保证机器人有一定的牵引力和运行速度,设计了两种蠕动移动机构.第1种机构(图2a))为利用弹簧力作用的力锁合凸轮结构,同时利用了平底凸轮机构受力好、润滑好并且传动速度大等优点;第2种机构(图2b)为形锁合的简单等宽凸轮结构,该机构贯穿了以简单、设计方便的结构来实现复杂运动的总体设计思想.凸轮结构简单、紧凑、设计方便,而且只要设计合理适当的凸轮轮廓曲线,便能够获得需要的从动件运动规律.所以以上两种机构都能够保证机器人实现一定规律的运动,并且实现机器人总体结构的简单化和紧凑化.

a) 基于力锁合凸轮的蠕动体结构

b) 基于形锁合凸轮的蠕动体结构
2.2 力锁合凸轮结构的设计
1)推杆运动规律的选择
多项式函数具有连续性,且其导数仍为多项式,因而采用多项式运动规律,容易获得高阶连续性,所以从动件采用多项式运动规律来设计凸轮的结构.根据初始条件得到推杆的运动规律为:
根据上式得到推杆的运动规律曲线如图3.
a) 无量次化运动规律曲线

b) 运动规律曲线
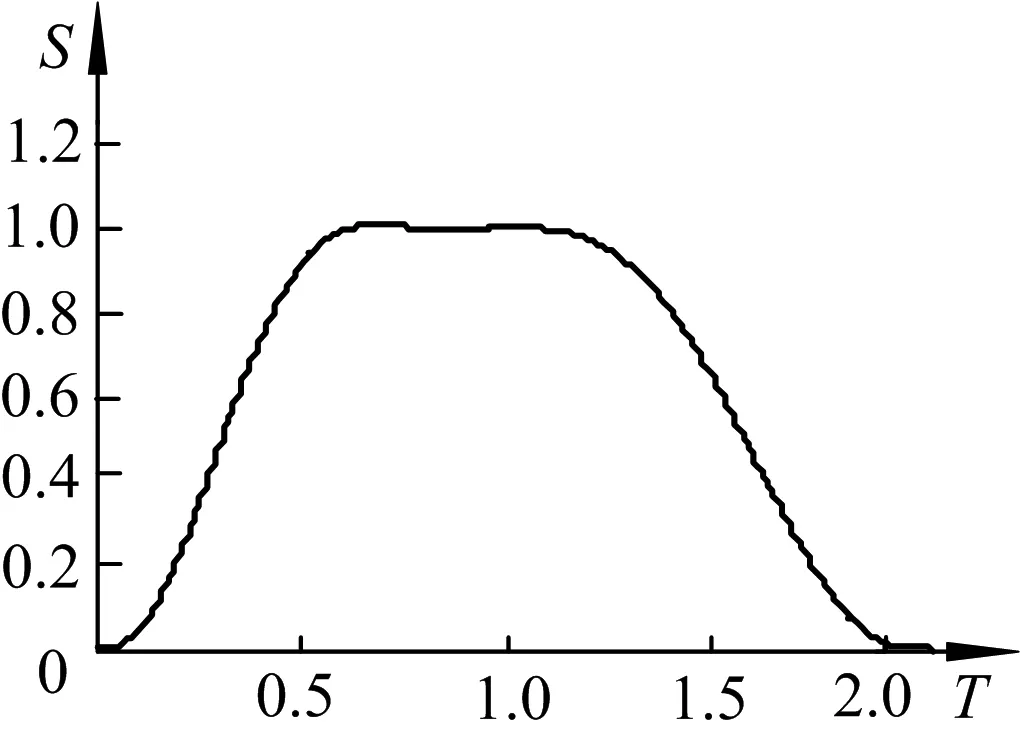
为清晰地分析该种运动规律的性能,绘制其SVAJ曲线(图4).

a) 位移曲线
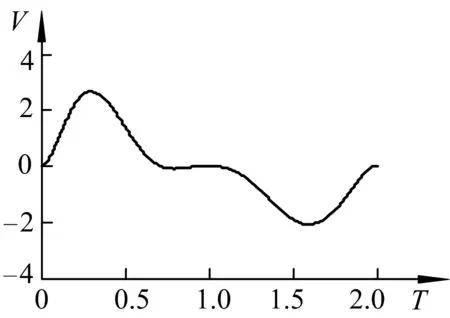
b) 速度曲线

c) 加速度曲线

d) 跃度曲线
2) 凸轮轮廓线的设计
凸轮轮廓线的设计采用ADAMS/VIEW提供的应用相对轨迹曲线生成实体的方法来进行.先采用30×30×3的板来代替凸轮,并在代凸轮上施加一旋转副,在推杆上定义一滑移副.为得到凸轮轮廓曲线,分别在滑移副和旋转副上施加如图5所示的驱动,并定义相应的函数.
在进行一次运行仿真后,通过Creat Trace Spline菜单项得到凸轮的轮廓曲线如图5b).
以上即为力锁合凸轮机构的设计.形锁合凸轮机构的设计大同小异,但是形锁合凸轮在运作过程中存在横越冲击现象,会增大振动,影响定位精度,又偏心轮在作业过程中会有很大的甩动,影响机器人的运动稳定性,同时形锁合顾名思义,其驱动性能会受到其几何形状的影响,不利于机器人的微小化,所以这里采用第1种机构也就是力锁合机构来作为驱动.

a) 驱动函数的定义

b) 凸轮轮廓线
2.3 箝位机构的设计
箝位机构的结构原理图如6,为使微型管道机器人实现在封闭狭窄空间里灵活可靠行走,该部分的设计应满足以下设计要求:①满足尺寸限制的要求;②灵活可靠的启停;③能够越过一定的障碍;④具有一定的稳定性.
根据管径要求为25~40 mm,来设计3条支撑轮腿的尺寸为:a=c=8 mm,b=5 mm,r=3 mm.同时为满足尺寸限制的要求,该部分所设计的步进电机、螺母以及滑块的尺寸也不能够太大.
为使管道机器人稳定行走,设计呈120°分布的3条支撑腿,即保证了微型管道机器人与管壁之间实现了3点支撑.由于受步进电机步距角以及细分等因素的影响,管道机器人径向的调节精度并不是很高,如当机器人遇到小的障碍时,仅仅在丝杠螺母的调节下不能保证轮脚与管壁的有效张紧,这时设计了越障弹簧,从而实现微型管道机器人的有效越障和平稳运行.
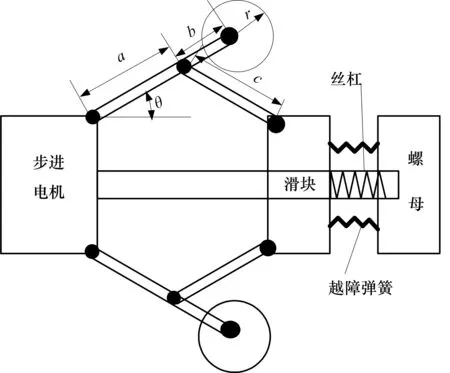
图6 箝位机构原理Fig.6 Ground-clamp institution principle diagram
3 动力学分析及虚拟样机仿真
3.1 动力学建模
微型管道机器人系统可以分为3个子系统,下面对其主要作用的蠕动驱动子系统进行动力学分析,对系统进行构件质量集中化处理,得到动力学模型(图7).其中:k为弹簧的刚度系数,k0为凸轮与推杆的接触刚度,k1为推杆的拉伸刚度,k2为推杆与机架的接触刚度,m11,m12为推杆等效质量,m11+m12=m1为推杆的质量,m2为机架质量,S为凸轮对推杆产生的理论位移.

图7 蠕动驱动子系统的动力学模型Fig.7 Peristalsis subsystem dynamic model



图8 等效单自由度动力学模型Fig.8 Equivalent single-degree-of-fredom dynamic model
根据模型建立动力学方程
3.2 虚拟样机仿真
3.2.1 几何建模
在进行运动分析计算之前,首先利用UG对微型管道机器人进行三维建模以及装配,最终得到如图9所示的三维模型.

图9 机器人三维模型Fig.9 Robot 3D model
将UG建立的prt文件导出为.x-t类型文件,即parasolid实体模型,然后将其导入ADAMS进行总体的运动学及动力学分析.
3.2.2 编辑构件
对于从三维软件导入ADAMS的几何模型,需要编辑构件的属性和构成构件元素的属性,如颜色、位置、名称和材料属性等.尤其是材料属性,否则在计算仿真的过程就会出现错误的信息.这里定义中间架,凸轮以及推杆为耐磨质量较轻的硅铝合金,由于其不属于ADAMS的标准材料库,需要自定义其弹性模量为6.89E+004、泊松比为0.33、密度为2.8E-006,同理定义6个轮子为橡胶材料(弹性模量为7.8,泊松比为0.47,密度为9.3E-007),其它的均定义为标准材料库中的刚材料.同时修改模型的外观以及名称最终得到管道机器人在ADAMS环境中的姿态(图10).
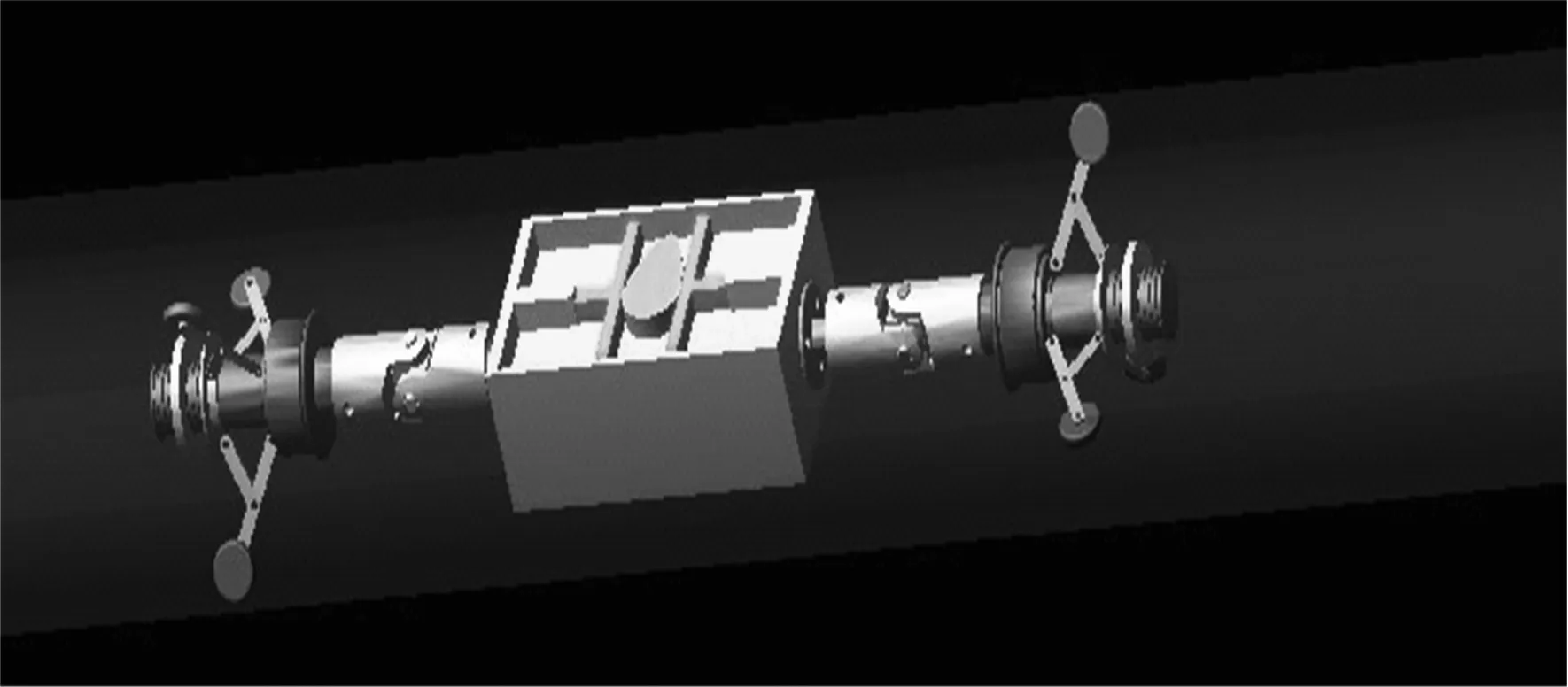
图10 机器人的虚拟样机设计Fig.10 Robot virtual prototype design
3.2.3 约束建模
为模拟系统的真实运动情况,根据实际情况抽象出相应的滑移副、螺旋副、旋转副等运动副,同时为使系统运动起来在运动副上添加了驱动和载荷,以及在构件间施加了载荷.对微型管道机器人系统添加了11个滑移副,9个旋转福,2个螺旋副;施加了3个旋转电机驱动,4对接触载荷以及2个弹簧来进行虚拟样机仿真.
3.2.4 结果分析
经过仿真分析计算,得到如图11的结果.

图11 运动学分析曲线Fig.11 Kinematics analysis cure
图中曲线1代表电机转速为1 200 r/m时微型管道机器人运动仿真结果,微型管道机器人的速度最大可以达到27.2 mm·s-1.通过仿真分析可以看出最后机器人整体的运动规律基本上接近多项式运动规律,即避免了刚性冲击和柔性冲击,实现了机器人的稳定可靠行走.曲线2为电机转速为900 r/m时的运动仿真结果,明显在该驱动下其速度要小的多,整体运动性能不如在高速驱动下的好.通过在两种初始条件下的仿真以及对最后仿真结果的分析,机器人在个别运动周期内(如曲线1的0.4~0.5 s时间周期)会出现微小的速度波动,这将导致运动副中动压力的增加,降低机械的寿命、工作质量和效率.所以为提高其运动性能,有必要对其进行提高和优化.
4 结论
通过对国内外相关文献的研究,综合分析现有微型管道机器人的研究现状,文中设计了一种新型的结构简单的蠕动-张紧式微型管道机器人.首先,确定了机器人的总体方案,主要由3个部分组成,并对其主要的结构进行了设计,尤其是起重要作用的凸轮部分的设计,为获得良好的运动性能采用了多次多项式运动规律;最后,对机器人进行了动力学分析和虚拟样机仿真,验证了其运动可行性.最终设计的管道机器人能够运行于管径为25~40 mm,曲率半径小于115 mm的管道内,最大速度可达到27.2 mm/s.
[1] 徐从启,解旭辉,戴一帆,等.微小管道机器人适应不同管径的3种调节机构的力学分析[J].机械科学与技术,2008,27(10):1145-1148.
Xu Congqi,Xie Xuhui,Dai Yifan,et al.Dynamic analysis of three regulating mechanisms for a micr in-pipe robot adaptable to different pipe diameters[J].MechanicalScienceandTechnologyforAerospaceEngineering, 2008,27(10):1145-1148. (in Chinese)
[2] 官长斌,陈娟.一种新型蠕动式管道机器人结构设计[C]//第五届全国流体传动与控制学术会议论文集.2008,10:398-402.
[3] Zhao Yuxia,He Guangping,Gao Dewen,et al.Micro in-pipe robot mechanical structure design of shape memory alloy driving[C]//Proceedingsofthe2009IEEEIternationalConferfenceonRoboticsandBiomimetics.USA:IEEE,2009:360-365.
[4] 李伟,于连国,王妍玮. ADAMS在虚拟样机仿真分析中的应用[J].机电产品开发与创新,2010,23(3):96-97.
Li Wei, Yu Lianguo,Wang Yanwei. New box-type dryer design based on ADAMS[J].Development&InnovationofMachinery&ElectricalProducts, 2010,23(3):96-97. (in Chinese)
[5] 左建勇,颜国正.用于肠道检查的微小型蠕动机器人[J].上海交通大学学报,2004,38(8):1310-1313.
Zuo Jianyong, Yan Guozheng. A miniature creeping robot for intestinal inspection[J].JournalofShanghaiJiaotongUniversity,2004,38(8):1310-1313.(in Chinese)
[6] 黄明伟.新型无缆管道机器人的初探[D].广东广州:广东工业大学,2006:12-13,23-24.
[7] 王宏刚.微小管道机器人结构设计及动力学分析[D].长沙:国防科技大学,2007:46-47.
[8] Jinwan Lim,Hyunjun Park,Sunmoo Moon,et al.Pneumatic robot based on inchworm motion for small diameter pipe inspection[C]∥Proceedingsofthe2007IEEEInternationalConferenceonRoboticsandBiominmetica.USA:IEEE,2007:330-335.
[9] Jinwan Lim,Hyunjun Park,Jaemin An,et al.One pneumatic line based inchworm-like micro robot for half-inch pipe inspection[J].Mechatronics,2008,18:315-322.
[10] Yuichi Nakazato,Yukihiro Sonobe,Shigeki Toyama,et al.Development of an in-pipe micro mobile robot using periatalsis motion[J].JournalofMechanicalScienceandTechnology,2010,24:51-54.