加工番茄果秧分离技术发展现状分析
2013-11-13朱兴亮李成松秦金伟冯玉磊
朱兴亮,李成松,坎 杂,秦金伟,冯玉磊
(石河子大学机械电气工程学院, 新疆石河子 832003)
世界加工番茄种植区主要集中在美国加利福尼亚地区、地中海地区(主要包括意大利、法国、西班牙、葡萄牙和希腊等5国)和中国的新疆、内蒙古地区。其中美国和欧洲大多实现了番茄收获机械化,中国作为世界番茄的主要产区,机械化收获程度却很低[1]。中国番茄收获期主要集中在7月下旬到9月下旬,最佳收获时间短,而且番茄成熟期气温较高,若不能及时采收并进行加工,会变质、发酵,影响番茄制品的质量和食品安全。因此,实施机械化采收是番茄产业发展的必然趋势。
果秧分离是番茄收获机采收番茄的重要环节之一[2],果秧分离效果会影响番茄收获机性能的综合评定以及番茄种植户的经济利益[3]。不同的果秧分离方法,其适用范围和分离效果也不尽相同。所以,在设计番茄收获机械时,对果秧分离方法进行研究、选择显得尤为重要。
1 加工番茄果秧分离方法
国内外加工番茄果秧机械化分离方法主要有梳齿法、机械手采摘法和振动分离法。
1.1 梳齿法
该方法是将梳齿插入番茄茎秧,强制分离果实与茎秧,分离率较高,但在收获过程中番茄茎叶常造成梳齿部位的堵塞,对果实的损伤比较大,含杂率较高,不符合现在农业联合收获的发展趋势[4]。
1.2 机械手采摘法
该方法是将机器人的末端执行器(机械手)移至接近果实的位置,通过识别判断完成对番茄果实的采摘。但由于农业环境的复杂不确定性以及果实分布的随机性,采摘机器人还存在果实识别率和采摘效率不高,果实平均采摘时间长,机器人制造成本高等问题,难以适应大面积户外采收[5-12]。
1.3 振动分离法
该方法是利用番茄果实与其茎秧质量特性的不同(果实质量集中),通过振动发生器产生一定规律的振动,对番茄果秧进行抛甩,实现果实与茎秧的分离。振动分离法分离效率高,动力消耗少,是目前番茄收获机上应用最广泛的一种方法。目前,国内外番茄收获机上采用该方法的分离机构主要有带式和偏心块式两大类。
2 振动分离机构及特点
2.1 带式振动分离机构
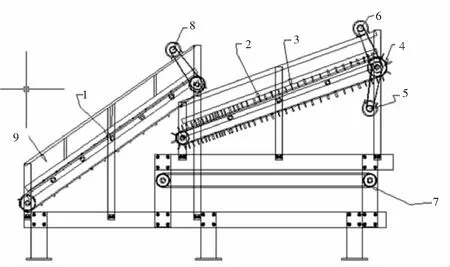
1-刮板式果秧原料输送机构;2-同步输送带;3-圆柱形胶立杆;4-从动链轮 5,6-主动链轮;7-刮板式果实输送机构;8-主动链轮;9-护栏机架
该机构(见图1)包括机架、输送部分和分离部分等。分离部分由多根同步输送带构成,每根输送带上设有橡胶头立杆,同步带与同步带之间留有间隙,每根同步输送带由一组传动机构传动,且每一组传动机构输入转速不同。工作时,输送部分将果秧输送至分离部分,随着同步输送带的周期性振动,由于番茄果实和茎秧质量特性的不同(果实质量集中),所产生的运动形式不同,最终实现果秧分离[13]。
带式分离机构的优点是频率和振幅可调,适应性较强,且不易缠绕滴管带、地膜等异物,即使有小部分缠绕在机构上也很容易清理。但由于运动方向不断变化,加速度大,对机构的冲击较大[13]。
2.2 偏心块式振动分离机构
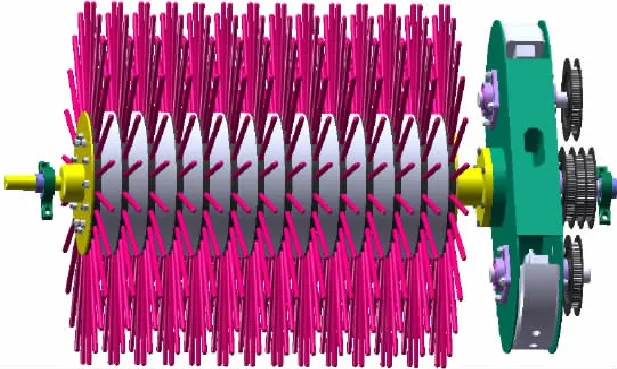
图2 偏心块式振动分离机构Fig.2 Eccentric inertial vibration generator
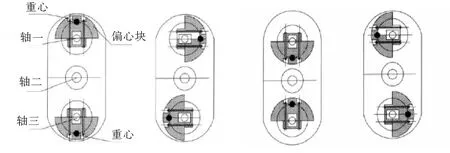
图3 偏心块式振动发生器工作原理Fig.3 Principle of eccentric inertial vibration generator
该机构由偏心块式惯性振动发生器和弹齿滚筒构成,见图2,振动发生器中的偏心块绕各自的自转轴等速同向转动(见图3),产生旋转力偶,这对力偶会在机壳内产生一个扭矩,带动整个机体转动,由于偏心块既自转又公转,且偏心块在旋转过程中重心相对于中间轴不停改变,因此产生的惯性力也在不停的改变,从而带动机体运动的力也在周期性的改变,机体在回转过程中转速不停改变:启动-加速-减速-启动。旋转的机体将运动传递到滚筒,弹齿滚筒就会在回转速度变化过程中通过弹齿橡胶棒的抛甩,把番茄果实和秧苗分离开来,实现果实分离的目的。该机构主要优点是果实分离效率高,消耗功率低,但是在喂入量不均时偏心块式振动发生器的变速变向运动容易受到影响,达不到预期分离效果,且容易产生堵塞,冲击载荷大。所以有必要寻找一种传动可靠、平稳,并且能够达到以上运动形式的机构代替偏心块带动弹齿滚筒实现变速变向运动。
3 W-W型非圆齿轮行星轮系

1,2,3,4-非圆齿轮;H-系杆;Ⅰ-输入轴;Ⅱ-输出轴
非圆齿轮行星轮系具有多种类型[15],可实现变速单向运动、变速变向运动等各种复杂特殊的运动,其在高速插秧机、液压马达等机械上也有较成功的应用[16-19]。W-W型非圆齿轮行星轮系可以实现多种传动比的变速变向运动[20],适合运动形势复杂的变速变向运动,而且依靠齿轮传动平稳可靠,受到负载变化影响小,冲击载荷相对较小。
W-W型非圆齿轮行星轮系由输入轴、输出轴、系杆和4个非圆齿轮构成(见图4),齿轮1固定不转,由轴Ⅰ输入,使系杆H回转,齿轮4及轴Ⅱ输出。
W-W型非圆齿轮行星轮系传动比:

W-W型非圆齿轮行星轮系具有传动平稳可靠、自身冲击载荷小以及负载变化影响小,能够实现多种变速变向运动等特点,可以用来代替偏心块式振动发生器带动弹齿滚筒运动。
4 结 语
目前,国内外加工番茄分离技术的主要方向是振动分离法。振动分离法中偏心块式分离机构以其分离效率高、动力消耗少等特点被广泛的应用在番茄收获机上,但是在实际运用中也存在喂料不均时易堵塞以及冲击载荷大等问题。而W-W型非圆齿轮行星轮系不仅能够满足分离机构运动要求,还具有传动平稳可靠、负载变化影响小等特点, 因此建议采用W-W型非圆齿轮行星轮系代替偏心块式振动发生器实现番茄果秧分离。
参考文献/References:
[1] 金 京.第十届世界加工番茄大会将于6月10日召开[EB/OL]. Http://finance.sina.com.cn/nongye/nyzhxx/20120607/120312249984.shtml,2012-06-07.
JIN Jing.The Tenth World Processing Tomato Congress will be held on June 10[EB/OL].Http://finance.sina.com.cn/nongye/nyzhxx/20120607/120312249984.shtml, 2012-06-07.
[2] 谭洪洋,李成松,坎 杂,等. 加工番茄果秧分离装置的设计及仿真[J].农机化研究,2012(1):84-87.
TAN Hongyang, LI Chengsong, KAN Za, et al. Design and simulation on processing tomato fruit separation device[J].Journal of Agricultural Mechanization Research,2012(1):84-87.
[3] 卢勇涛,李成松,陈永成.番茄收获机果实分离机构的工作原理及结构特点[J].新疆农机化,2008(4):12-13.
LU Yongtao, LI Chengsong, CHEN Yongcheng. The working principle of the separation mechanism and structural characteristics of the fruit of the tomato harvester[J]. Xinjiang Agricultural Mechanization, 2008(4):12-13.
[4] 季坚柯H Φ.蔬菜收获机械[M].北京市农业机械研究所,译.北京:中国农业机械出版社,1982.
Диденко Н Ф. Vegetable Harvesting Machine[M].Translated by Beijing Agricultural Machinery Institute.Beijing: China Agricultural Machinery Press, 1982.
[5] MONTA M, KONDO N, TING K C. End-effectors for tomato harvesting robot[J]. Artificial Intelligence Review, 1998,12(1/2/3): 11-25.
[6] KONDO N, TING K C. Robotics for Bioproduction System[M]. New York:American Society of Agricultural Engineering Publisher, 1998.
[7] 王学林,姬长英,周 俊,等.基于灰色预测控制的果蔬抓取系统设计与试验[J].农业工程学报,2010,26(3):112-117.
WANG Xuelin, JI Changying, ZHOU Jun, et al. Design and experiment of fruit and vegetable grasping system based on grey prediction control[J]. Chinese Society of Agricultural Engineering, 2010,26(3):112-117.
[8] 李秦川,胡 挺,武传宇,等.果蔬采摘机器人末端执行器研究综述[J].农业机械学报,2008,39(3):175-179.
LI Qinchuan, HU Ting, WU Chuanyu, et al. Review of end-effectors in fruit and vegetable harvesting robot[J]. Chinese Society for Agricultural Machinery,2008,39(3):175-179.
[9] 梁喜凤,王永维,苗香雯.番茄收获机械手避障运动规划[J].农业机械学报,2008,39(11):89-93.
LIANG Xifeng, WANG Yongwei, MIAO Xiangwen. Motion planning of a tomato harvesting manipulator for obstacle avoidance[J]. Chinese Society for Agricultural Machinery,2008,39(11):89-93.
[10] 刘继展,李萍萍,李智国.番茄采摘机器人末端执行器的硬件设计[J].农业机械学报,2008,39(3):109-112.
LIU Jizhan, LI Pingping, LI Zhiguo. Hardware design of the end-effector for tomato-harvesting robot[J]. Chinese Society for Agricultural Machinery, 2008,39(3):109-112.
[11] 李智国,刘继展,李萍萍.机器人采摘中番茄力学特性与机械损伤的关系[J].农业工程学报,2012,26(5):112-116.
LI Zhiguo, LIU Jizhan, LI Pingping. Relationship between mechanical property and damage of tomato during robot harvesting[J]. Chinese Society of Agricultural Engineering, 2012,26(5):112-116.
[12] 张铁中,杨 丽,陈兵旗,等.农业机器人技术研究进展[J].中国科学:信息科学, 2010, 40(sup): 71-87.
ZHANG Tiezhong, YANG Li, CHEN Bingqi, et al. Research progress of agricultural robot technology[J].Science China(Information Sciences), 2010, 40(sup): 71-87.
[13] 齐 伟,高治国,邓成伟,等.番茄收获机两种果秧分离装置的工作原理及特点[J].新疆农机化,2012(3):11-13.
QI Wei, GAO Zhiguo, DENG Chengwei, et al. Two fruit seedlings separation device working principle and characteristics of the tomato harvester[J]. Xinjiang Agricultural Mechanization, 2012(3):11-13.
[14] 中国农垦发展中心,农业部农垦局.收获机械[M].北京:中国农业出版社,2009.
China State Farms Development Center,Ministry of Agriculture Bureau of Reclamation. Harvesting Machinery[M].Beijing: China Agriculture Press, 2009.
[15] HIDEO K. Planetary Gear Having Non-Circular Gears[P]. US: 4788891,1988-12-06.
[16] CHEN Dejun. A study on the rearward separate-planting mechanism of rice transplanter[J]. Journal of Jinhua College of Profession and Technology, 2001, 1(4): 1-3.
[17] 魏秦文,冯 斌,马志新.非圆齿轮行星差速机构运动特性仿真分析[J]. 机械工程师, 2009(1): 133-135.
WEI Qinwen, FENG Bin, MA Zhixin. Non-circular gear planetary differential kinematic simulation analysis[J]. Mechanical Engineers, 2009(1): 133-135.
[18] 和 丽,许纪倩,周 娜,等.非圆齿轮行星轮系分插机构运动分析[J]. 农业机械学报, 2007, 38(12): 74-77.
HE Li, XU Jiqian, ZHOU Na, et al. Non-circular gear planetary gear train of planting mechanism[J]. Chinese Society for Agricultural Machinery, 2007, 38(12): 74-77.
[19] CLEGHORN W I,SHAW E C. Computer analysis of continuously variable transmission using non-circular gears[J]. Trans CSME, 1987, 11(2): 113-120.
[20] 吴序堂,王贵海.非圆齿轮及非匀速传动比[M]. 北京:机械工业出版社,1997.
WU Xutang, WANG Guihai. Non-circular Gear and the Nonlinear Transfer Function[M].Beijing: China Machine Press,1997.
