基于亮度不变特征的自适应双边滤波算法
2013-11-12康长青徐格静项东升赵永标
康长青,徐格静,项东升,赵永标
(湖北文理学院数学与计算机科学学院,湖北襄阳441053)
1 引言
图像去噪是图像处理和计算机视觉中的重要的基础问题之一。如何在噪声去除的同时最大程度保留边缘细节是图像去噪的一个难题。目前常见的边缘保持滤波算法主要有各向异性扩散滤波[1-2],非局部均值滤波[3-4],过完备词典学习[5-6]和双边滤波[7-12]等。
各向异性扩散滤波[1]主要采用梯度模值函数的局部扩散系数,使得图像逐渐逼近,能在一定程度上保持图像的边缘,但是算法在理论上的不适定性,会造成处理过程的不稳定,使得算法处理的时间受噪声方差影响严重;非局部均值滤波[3]主要利用图像的自相似性冗余特征,通过对图像的逐块估计,相似度权重计算和加权平均来去噪,特别适用强纹理图像处理,但是由于逐像素计算块相似度,存在计算复杂度较高,不便于实时运用的缺点。过完备词典学习算法[5]主要基于稀疏表示理论,通过设计适当的过完备字典,求解稀疏表示来进行滤波,但是该方法同样存在计算量大、复杂度高的不足;相比以上算法,双边滤波算法[7]采用空间距离和亮度距离加权平均,计算简单,实现容易,已经广泛应用于彩色图像处理领域和其他图像处理与分析领域,主要缺点是难以确定合适的参数。
研究人员提出了各种双边滤波的改进算法。文献[8]提出使用图像的显著度值来改进空间距离参数,缺点是忽略了亮度距离参数比空间距离参数受噪声变化影响更明显的特性。文献[9]提出采用Stein的无偏风险估计的统计方法来确定最优参数,但是算法需要复杂的数值计算。文献[10]提出使用平滑偏好函数来进行最优参数确定,存在依赖用户偏好,自适应性缺乏的不足。文献[11]提出在空间距离和亮度距离参数基础上,增加一个局部特征滤波参数,增加了参数选择的复杂性且不具有自适应性。由于上述算法采用的像素亮度差很容易受到噪声的干扰,而相位一致性测度[13]是一个量纲一的量,具有不受图像亮度或对比度变化的影响,符合人类视觉系统感知特性的优点,因此本文在双边滤波思想的框架下,集成相位一致性亮度不变特征,提出一种新的自适应的双边滤波算法。
2 双边滤波器的原理

式中,Iin为原始图像;Iout为滤波后的图像;j为模板的中心像素点;N(j)是其邻域;Υd(i,j)为空间距离函数;Υr(i,j)为亮度距离函数。这两个距离函数的公式分别为:

二维图像的双边滤波器的滤波模型为:
式中,σd为空间距离标准差;σr为亮度距离标准差。
由以上公式可知,双边滤波器的权系数由邻域间空间距离和亮度距离共同构成,也即取决于σd和σr的参数选择。而参数的选择主观任意性较大,不具有对图像亮度和噪声方差的自适应性。当σd变大,参与滤波的像素个数增加,会造成图像变得更模糊;如果σr对σd补偿,随着σr变大,像素亮度差的较大噪声又会作为图像边缘被保留。参数的随意选择会造成图像视觉质量的降低,如何进行参数的自适应设置变得非常有必要。
3 基于亮度不变特征的自适应双边滤波算法
3.1 空间距离参数σd的选择
空间距离参数σd使用文献[13]提出的相位一致性测度来确定。在位置为i、方位为θ的噪声鲁棒相位一致性特征函数表示为:

其中,An和Фn是在小波尺度n幅值和相位为加权平均相位;T是噪声阈值;ε是为一个小的正数,是为了避免计算过程中上式出现除数为零的情况,符号?」表示表达式为正时取自身值,否则取0。

W(i,θ)是频率传播的权重因子,窄的频率分布分配小的权值。W(i,θ)的值由频率宽度决定,表示为:其中,c为加权函数的切断值;g为增益因子,决定了切断的锋利程度;s(i,θ)为滤波器响应的频谱宽度,表示为:

其中,Amax(i,θ)为在(i,θ)最大响应滤波器的相位;λ为小波尺度的总个数。
利用相位一致性特征函数,用公式(8)~(10)计算图像中每一点的值:
求得图像局部相位的最大矩M(i)和最小矩m(i)为:

利用最大矩和最小矩,得到空间距离参数σd的表达式如下:

其中,σde为距离参数σd的边缘信息约束;σdc为角点信息约束。这里 σde=1.45,σdc=0.55。
3.2 亮度距离参数σr的选择
由于亮度距离σr和整幅图像的噪声方差直接相关。亮度参数应能够随着噪声方差的变化自动调整,采用文献[14]提出的灰度均一性测度方差估计算法,来建立亮度距离与噪声方差的变化关系。
将含有噪声的图像I(i,j)分为大小相等图像块,设Bkl为以中心坐标(k,l)为中心,大小为W×W的图像块,块的灰度均一性测度ξ可以用图1中的八个方向进行测度。对于给定的任意方向,分配给块的权重为{-1,-1,…,W-1,…,-1,-1},相应像素的加权平均值表示这个方向的灰度均一度。当W=3时分配给的权重为{-1,2,-1},图中水平方向和垂直方向的灰度均匀度表示为:

整个图像块的灰度均一性测度表示为:


当ξ≈0时,表示图像块均一性越好,选取这些均一性好的图像块来做为样本方差块,来估计图像中的噪声方差,可以表示为:

最终,建立亮度距离参数与噪声方差的关系为:

其中,K为比例系数。
3.3 双边滤波的迭代计算
利用迭代算法,可以增强双边滤波器的去噪性能。为了防止多次滤波带来的图像结构性信息的丢失,确定迭代终止准则为:

其中,S表示结构相似性指标[15];C表示阈值;n表示迭代次数。
4 实验结果与讨论
为了验证本文算法的去噪性能和边缘保持特性,首先采用标准House和Monarch(512×512像素)作为测试图像,分别应用文献[7]、[8]、[11]的算法对不同高斯噪声的图像进行去噪实验,并对比和分析相应的实验结果。
图2为在噪声方差分别为20,30,40和100时,各种算法的峰值性噪比(PSNR)评价指标值。从图中可以看出本文算法的去噪性能明显高于文献[7]和文献[8],略高于文献[11]的算法。

由于本文算法和文献[11]的PSNR比较接近,图3给出了House图像在方差为30时的去噪效果图,从图3可以看出,本文算法得到了更加平滑的图像区域和更明显的边沿特征,产生的纹理模糊小于文献[11],取得了更好的边缘保持特性。

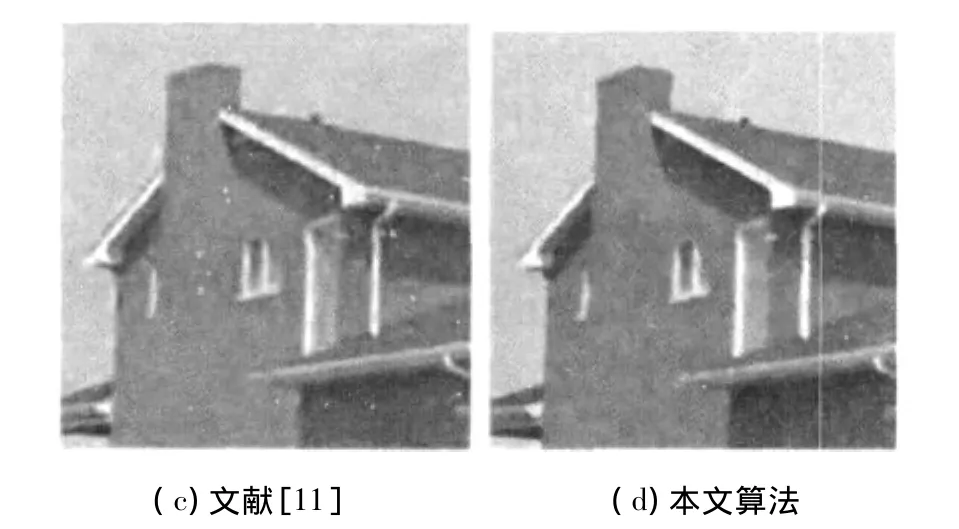
图3 算法的效果图
接着再对标准图像库边缘特征明显的Lena,Goldhill和Peppers图像进行试验,求出各种算法在上面定义方差下的PSNR,对所有五个图像结果求平均值,得到算法的PSNR值如表1所示。从表中可以看出本文算法比原始双边滤波算法PSNR提高2.2 dB,比文献[11]高出 0.49 dB。

表1 算法的平均PSNR值
本文算法为迭代算法,在方差为40时大约需要5次迭代,迭代的次数会随着方差的变大而增加,5次迭代所需处理时间为80 s左右。
5 结束语
本文提出了一种基于亮度不变特征的自适应双边滤波模型,分别采用相位一致性特征和灰度均一性测度来建立双边滤波器的空间距离参数和亮度距离参数的调整策略。实验表明,算法具有计算简单,鲁棒性好,可以取得更好的图像去噪性能和细节保持能力等优点。算法的不足之处在于处理时间略高,这将是作者下一步的努力方向。
[1] PPerona,Jmalik.Scale-space and edge detection usinganisotropic diffusion [J].IEEE Transactions on Pattern A-nalysis and Machine Intelligence,1990,12:629 -639.
[2] M Black,G Sapiro,D Marimont,et al.Robust anisotropic diffusion[J].IEEE Transactions on Image Processing,1998,7(3):421 -432.
[3] A Buades,B Coll,JMorel.A non local algorithm for image denoising [C]//Proc.Int.Conf.Computer Vision and Pattern Recognition,2005,2:60 -65.
[4] A Buades,B Coll,JMorel.Nonlocal image and movie denoising[J].International Journal of Computer Vision,2008,76(2):123 -139.
[5] M Elad,M Aharon.Image denoising via sparse and redundant representations over learned dictionaries[J].IEEE Transactions on Image Process,2006,15(12):3736-3745.
[6] JMairal,FBach,JPonce,etal.Online learning formatrix factorization and sparse coding[J].Journal of Machine Learning Research,2010,11(1):19 -60.
[7] Tomasi C,Manduchi R.Bilateral filtering for gray and color images[C]//Proc.Int.Conf.Computer Vision,1998:839-846.
[8] Xie J,Heng P A,Shah M.Image diffusion using saliency bilateral filter[J].IEEE Transactions on Information Technology in Biomedicine,2008,12(6):768 -771.
[9] Peng H,Rao R.Bilateral kernel parameter optimization by risk minimization [C]//Proc.Int.Conf.Image Processing,2010:3293 -3296.
[10] Kisilev P,Freedman D.Parameter tuning by pairwise preferences[J].IEEE Transactions on Information Technology in Biomedicine,2010,12(6):1 -11.
[11] Butt I T,Rajpoot N M.Multilateral filtering:a novel framework for generic similarity-based image denoising[C]//Proc. Int. Conf. Image Processing,2009:2981-2984.
[12] Lei Xiaojie,Gu Guohua,Sui Xiubao,et al.Improved temporal high-pass filter nonuniformity correction based on bilateral filter[J].Laser & Infrared,2012,42(7):831 -836.(in Chinese)
雷晓杰,顾国华,隋修宝,等.红外双边滤波时域高通非均匀性校正[J].激光与红外,2012,42(7):831-836.
[13] Kovesi P.Phase congruency:A low level image invariant[J].Psychological Research,2000,64:136 - 148.
[14] Amer A,Dubois E.Fast and reliable structure-oriented video noise estimation[J].IEEE Transactions on Circuits and Systems for Video Technology,2005,15(1):113-118.
[15] Wang Z,Bovik A C,Sheikh,et al.Image quality assessment:from error visibility to structural similarity[J].IEEE Transactions on Image Processing,2004,13(4),600-612.
