动态红外成像系统MRTD的测试与分析
2013-09-27黄维东潘文卿
王 晶,纪 明,敬 鸣,黄维东,潘文卿
(西安应用光学研究所,陕西西安710065)
1 引言
在热成像系统中,MRTD是综合评价系统温度分辨力和空间分辨力的重要参数,它不仅包括系统特性,也包括观察者的主观因素。因此,MRTD的测量成为至关重要的任务。现阶段,MRTD的测试都是在实验室环境下进行的静态测试。而运动中精确打击目标是对战术武器的基本要求,因此,载体的运动对光电成像系统性能影响成为急需解决的问题,本文主要研究运动状态下红外热像仪最小可分辨温差(MRTD)测试,详细阐述了测试原理、方法和过程,并给出一定的实验结果,为更全面完整地研究运动状态下光电成像系统的性能打下了基础[1]。
2 测试原理及数学模型

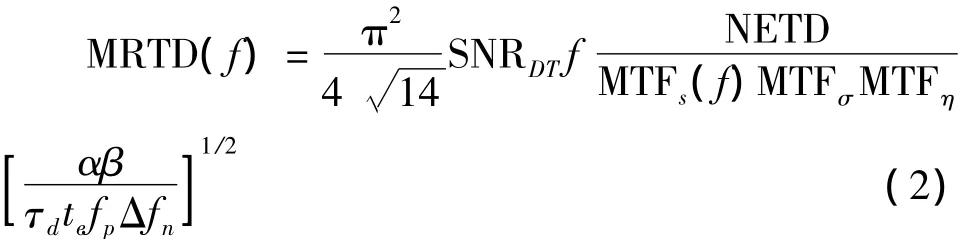
理论上红外热像仪MRTD由下式所示[2]:式中,SNRDT为观察者能分辨线条的阈值视觉信噪比;f为目标空间频率;NETD为待测热像系统噪声等效温差为人眼滤波函数;α,β分别为瞬时视场;te为人眼的积分时间;Δfn为噪声等效带宽;τd为驻留时间;fp为帧频。
当目标或红外热像仪处于运动状态时,最小可分辨温差(MRTD)公式中的一些因子会发生变化,其中整个系统的调制传递函数(MTF)变化最明显,假设其他的变化与之相比可以忽略不计。
于是,式(1)改写为:
由于增加了目标的动态变化特征,在热像仪各设置参数不变的情况下,落在每个探测元上的光量子数及光量子在单元面元上的驻留时间和静态时的光量子数和驻留时间明显不同,外在结果表现为NETD和MTF发生变化,在最终图像上则表现为灰度变化梯度和对比度发生变化。
图1为测试红外系统MRTD时所用的四杆靶靶标示意图,根据红外热像仪的成像原理,从光量子学的角度考虑,光电探测器在接收红外辐射后,光生载流子浓度逐渐增大,必须经过一段时间后才能趋向稳定,而在稳定状态下,突然撤去红外辐射,光生载流子也要经过一段时间才能趋于零。这两种现象均称为惰性。正是由于光电探测器的这种惰性现象,当目标靶标或红外热像仪处于运动状态时,会出现光电探测器面元上的光生载流子还未上升到稳定值就开始下降和还位衰减到零就开始上升的混乱状态,于是目标图像对比度降低,图像模糊。图2为当四杆靶目标在水平方向做正弦运动时某一时刻的灰度示意图,如图所示,当目标或热像仪运动时,四杆靶边沿的灰度对比度下降,图中所示时刻目标偏离初始位置的位移极小,当位移增大时,图像将会出现更严重的混乱,影响四杆靶目标的识别[3]。

图1 测试四杆靶靶标示意图

图2 正弦运动状态下某时刻测试四杆靶灰度示意图
测试目标或红外成像系统运动导致图像灰度对比度下降的主要原因是在运动过程中落在每个探测元上的光量子数及光量子在单元面元上的驻留时间和静态时的光量子数和驻留时间明显减小,即辐射能量下降。这种现象可以从理论上通过建立数学模型来表达。
目标或红外成像系统按y=asinωt做正弦运动,在运动过程中的某一时刻,目标图像的一部分图像如图3所示,假设目标此刻的运动幅度为m,四杆靶目标的高度为H,根据普朗克定律可以计算出此时测试目标黑体辐射功率W黑和测试背景黑体辐射功率W背,Wλ(λ,T)=C1λ-6((exp(C2/λT)-1)。被测热像仪焦距为f,于是,在目标图像中,由于运动导致四杆靶条纹图像两侧辐射能量的变化趋势数学模型分别为式(3)和式(4):

式中,M1表示目标或热像仪运动过程中某一时刻单个靶左侧能量,如图3中A区域所示;M2表示目标或热像仪运动过程中某一时刻单个靶右侧能量,如图3中B区域所示。在整个运动过程中,只要运动的幅度不超过单个靶标之间的间隔长度,则四个靶左右两侧的能量大小均可以用式(3)和式(4)分别表示[4]。

图3 正弦运动状态下部分四杆靶能量分布示意图
针对数学模型式(3)和式(4),采用MATLAB对数学模型中的时间区域微分,得到运动过程中,当目标或热像仪偏离初始位置m的过程中,能量变化的曲线图,根据不同的运动频率,不同的四杆靶目标大小,不同的运动振幅,不同的目标背景温差,曲线的变化趋势均不相同,如图4~图6所示。(图中A曲线为图3中A部分的能量变化趋势图,B曲线为图3中B部分的能量变化趋势图)。

图7将图4~图6中同一性质的曲线放在一个坐标系中,从图7(a)可知,运动频率的改变对目标能量有很大的影响,运动频率越大,目标能量越小,反之目标能量越大;从图7(b)可知,运动过程中,目标空间频率的大小对目标能量的影响也很大,目标空间频率越高,目标能量越小,反之目标能量越大;从图7(c)可知运动振幅的改变对目标能量影响,运动振幅越大,探测到的能量也越大,运动振幅越小,探测到的能量越小,该理论符合实际探测的某一现象,即当静态目标无法探测或识别时,目标若有微小运动,反而更利于目标的探测与识别。综合上述理论论述、推导和仿真,结合实际测试情况,可以开展动态MRTD的测试和分析[5]。
3 测试装置
图8为动态MRTD测试装置示意图,主要包括标准目标辐射准直系统、准直辐射源控制系统、待测热像系统、图像数据采集与处理系统以及由电机驱动的镀银反射镜等五部分组成。标准目标辐射准直系统在控制系统的控制下提供一个标准的四杆靶差分红外辐射信号,经由正弦摆动的反射镜的反射提供给待测热像系统动态的四杆靶目标,图像数据采集与处理系统接收来自待测热像系统的视频输出信号,经由计算机自动处理给出最终的测试结果。
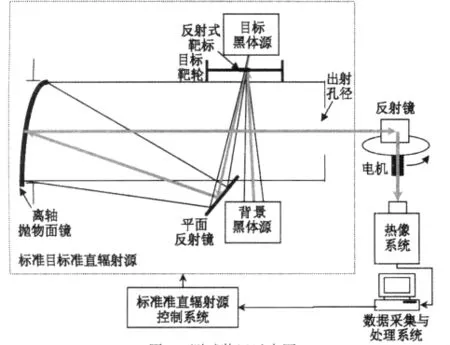
图8 测试装置示意图
4 测试过程
整套测试系统由计算机控制。如图8所示,计算机发送指令给标准目标准直辐射系统的高精度温控器和靶轮,受温控器控制的目标黑体和背景黑体产生稳定的差分信号ΔT,经靶标、反射镜和离轴抛物面镜反射后形成无限远的标准靶差分温度信号,该信号经过由电机控制的反射镜的正弦摆动,形成动态的无穷远四杆靶目标,供待测热成像系统接收。在待测热成像系统中,标准辐射准直系统提供的红外场景入射辐射经过光学系统聚焦在探测器上,然后探测器把光信号转换成电信号,经过后续电路放大和处理,再被显示在监视器或显示器上形成一幅灰度图像。
受红外成像系统本身空间分辨率限制,选取5个低频空间频率目标(0.33;0.71;1.67;2.00;2.50)cyc/mrad作为测试对象,反射镜正弦摆动的频率采用18Hz,反射镜左右正弦摆动的振幅为0.18°,热像仪在不同空间分辨率目标、不同振动频率、不同振动振幅、不同温差点,采集目标图像,温度范围从目标图像不能识别的状态温度T0,以0.05℃温差为步长,到目标图像完全可以识别的温度Tt。MRTD评价热成像系统性能方法为主观测试方法,受测试人员和测试条件影响很大,动态测试时受影响更大,为尽可能消除动态测试时主观因素的影响,利用热像仪图像采集软件,在不同空间频率、不同振动频率、不同振动振幅下的每个温差点采集100幅目标图像,分析每幅图像的静态可分辨特征,用统计学的方法,得出动态MTF和动态MRTD曲线。
5 动态MRTD曲线
根据上述给出的四杆靶识别判定方法,取空间频率分别为0.33,0.71,1.67,2.00,2.50(cyc/mrad)四杆靶作为目标,反射镜的振动频率为18Hz,振动方式为水平方向的正弦摆动,振动幅度为0.18°,通过识别不同温度差处采集到的100幅图像,得到如图10所示的不同空间频率下,图像在不同温差下能够被识别的概率曲线,实线为识别概率曲线的拟合曲线。五幅图的横坐标为空间频率,纵坐标为100幅图中能够被识别的图像数量。其中识别标准与静态测试MRTD的识别标准一致。
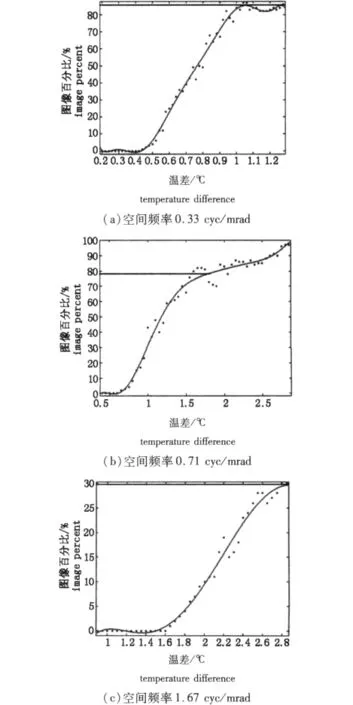

图9 不同空间频率,图像在不同温差下能够被识别的概率曲线
从图9中的4幅图可看出,当差分黑体温差很低,即低于灵敏度限时,图像受待测系统噪声和空间分辨率的双重限制,100幅图像中没有或只有几幅图像能被分辨,随温差的逐渐升高,100幅图像中部分图像逐渐被分辨,温差越大,100幅图像中能被识别的图像数量也越大,随温差的进一步升高,受待测系统空间分辨率的影响,100幅图像中被识别的图像数量不再发生变化,于是取该点处的值,即图10中5个不同空间频率的拐点值,做识别概率与空间频率的曲线,调制传递函数是系统再现场景能力的一个重要参数,它的曲线表示空间频率与图像对比度之间的关系,图像对比度的大小理论上与图像是否能被识别有着之间的关系,于是,所绘制的识别概率与空间频率的曲线可以认为与待测系统的动态调制传递函数(MTF)曲线趋势一致,如图10所示。

图10 待测系统动态调制传递函数曲线
为客观得到待测系统动态MRTD曲线,随机选取5个以上有测试经验人员对动态四杆靶图像进行判断,记录不同空间频率下,动态四杆靶能识别的差分温度值,然后在图9中根据差分温度找出识别概率做差分温度(或识别概率)与空间频率的曲线,得到如图11所示的待测系统动态最小可分辨温差(MRTD)曲线[6]。
从图10中可看出,当热像系统正弦运动时,待测系统的截止空间频率在2cyc/mrad左右,和图11中测试得到的待测系统动态最小可分辨温差曲线截止频率基本一致。图11和图12相比,截止频率和标准四条带目标设置温差都发生了很大变化,即图11中曲线的截止频率为2cyc/mrad,此频率下的温差为5.0℃,图12中曲线的截止频率为2.55 cyc/mrad,此频率下的温差为1.95℃。说明当目标或待测系统产生振动时,待测系统视距将明显变短[7]。
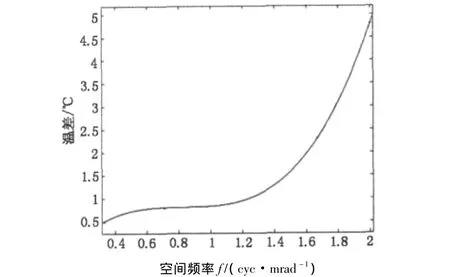

图12 待测系统静态最小可分辨温差曲线
6 结论
为研究载体运动对红外观瞄系统性能的影响,提出了一种在正弦运动状态下测试红外热像仪最小可分辨温差(MRTD)的方法,搭建了实验装置,设计了形成目标或热像仪运动的装置,采用统计学的方法对目标数据进行处理和分析,最终得到抖动情况下红外热像仪的MRTD值。实验结果证明,提出的方法和搭建的实验装置能很好完成动态MRTD测量,为更全面地研究载体运动对光电成像系统的性能的影响打下了基础。
[1] Zhang Jinquan.Current and development of the helicopter in FLIR[J].Modern Weaponry,2001,3:21 -23.(in Chinese)张金全.武装直升机机载前视红外系统的现状与发展[J].现代兵器,2001,3:21 -23.
[2] Zhang Jingxian,Li Yudan,JinWeiqi.Low-light and infrared imaging system[M].Beijing:Beijing Institute of Technology Press,1995:226 -242.(in Chinese)张敬贤,李玉丹,金伟其.微光与红外成像技术[M].北京:北京理工大学出版社,1995:226-242.
[3] Zhou Liwei,Liu Yuyan.Target identification and recognition[M].Beijing:Beijing Institute of Technology Press,2002:348 -349.(in Chinese)周立伟,刘玉岩.目标探测与识别[M].北京:北京理工大学出版社,2002:348-349.
[4] Zhang Jingyue,Jiming,Wang Huilin.Modeling and simulation of airborne stabilized sighting system[J].Journal Applied Optics,2006,27(6):491 -496.(in Chinese)张璟玥,纪明,王惠林.机载稳瞄控制系统模型及仿真分析[J].应用光学,2006,27(6):491 -496.
[5] Kou Xiaoming,Liu Shangqian,Hongming,et al.Objective evaluation and implementation for overall performance of thermal imaging system[J].Journal of Harbin Institute of Technology,2010,9:123 -125.(in Chinese)寇小明,刘上乾,洪鸣,等.红外热像仪综合性能的客观评价及实现技术[J].哈尔滨工业大学学报,2010,9:123-125.
[6] Xiang Shiming,Gao Jiaobo,Jiaomingyin,et al.Modern photoelectron imaging technology[M].Beijing:Beijing Institute of Technology Press,2010:128 -193.(in Chinese)向世明,高教波,焦明印,等.现代光电子成像技术概论[M].北京:北京理工大学出版社,2010:128-193.
[7] Jm Hilkert,M Bowen,JWang.Specifications for image stabilization systems[J].SPIE,1498:24 -37.
