面向社区楼宇楼梯扶手的智能清洗机
2013-11-12李普林龙鹏飞
李普林, 柏 伟, 龙鹏飞
(武汉理工大学物流工程学院, 湖北 武汉 430063)
1 研究背景
近几年,高楼层、密集型社区的出现,导致环卫清洁工人劳动强度增加.调研显示,如今的居民楼梯扶手、栏杆多为人工擦洗,且部分楼梯常年不清洗,藏污纳垢情况严重.人工擦洗效率低,任务重[1].因此有必要研制一种高效的楼梯扶手清洗装置来减轻清洁工的工作负担,保证楼梯的清洁卫生.
虽然目前有相关擦洗楼梯扶手的理论研究,市场上也出现了以清洁楼梯为主的半自动化的人工辅助式机器[2],但完全代替人工的清洗楼梯的工具仍没有出现.
鉴于以上不足,开发设计出一种新型的楼梯全自动清洗小车.它集擦洗栏杆和清扫楼梯功能于一体,机械化、自动化程度高,可有效地替代人工清洗工作.
2 作品介绍
机器主要由行进机构,擦洗机构和转弯机构三部分构成.行进机构为擦洗机构提供牵引动力和支撑力,同时提供清洗栏杆的用水.擦洗机构由前后两节构成,前节靠毛刷把浮尘掸去;后节由喷水和擦洗机构组成.转弯机构实现整机在楼梯弯道处顺利转弯,通过独特的三角型导轮装置顺利通过转弯死角;驱动小车采取三轮双驱动式结构,后轮分别用两个电机控制.前轮通过杆件约束,可绕内导轮转动,后轮用单片机控制电机转速,利用差速转弯.
2.1 行进机构
行进机构搭载在一辆小车上,小车靠蓄电池供电实现自主爬楼,它可为擦洗机构提供牵引动力和支撑力,并为擦洗机构提供所需的清洗用水.小车上配置有蓄电池、直流减速电机、水箱、压缩水泵、吸尘马达等设备.该机构主要靠星轮行星轮转换轮、锁死模块以及保持连杆竖直模块构成.整个行进机构的侧面如图1所示.

图 1 小车平面侧视结构图
2.1.1星轮行星式转换轮星轮行星式转换轮主要用于解决小车连同整个装置的上下楼问题,保证小车在倾斜楼梯上能够稳步移动,利用星轮行星轮转换技术,设计三轮交替着地从而完成上下楼.原理上相当于给行星轮安装一个“离合器”.当小车在平地行走时,“离合器”处于“离”的状态,此时行星轮转动的同时带动惰轮转动,实现平地行走;当小车上下楼时,“离合器”处于“合”的状态,此时行星轮被机构锁死(图2),所有齿轮刚性连接随主轴翻转,机器稳定爬楼.
如图3,1~7全为齿轮,其中1为中心轮,与驱动轴配合;2、3、4为相同惰轮;5、6、7为相同行星轮,分别与轮附板上三个车轮同轴,驱动车轮转动.若中心轮1不与轮附板锁死(即自转),那么1~7行星轮均转动,电机驱动中心轮1,通过2、3和4,带动与5、6、7轮同轴的轮胎的运动,实现联动;若中心轮1与轮附板锁死,所有齿轮均无相对自转,则机构可实现翻转.

图 2 上楼示意简图

图 3 小车车轮结构示意图
车轮主要由由7个齿轮,3个橡胶轮胎以及一个轮附板组成.车轮爬楼和在转弯平地上的受力分析见图4、图5[3].

图 4 齿轮平地受力分析示意图

图 5 齿轮爬楼受力分析示意图
2.1.2自适应锁死模块锁死机构通过连接中心轮钢丝绳的收放实现.采用图6所示机构来实现自适应锁死与释放.该机构主要由弹簧、滑轮组、钢丝绳、销钉组成.弹簧与插销连接,细线通过定滑轮与挡板相连.

图 6 中心齿轮锁死机构
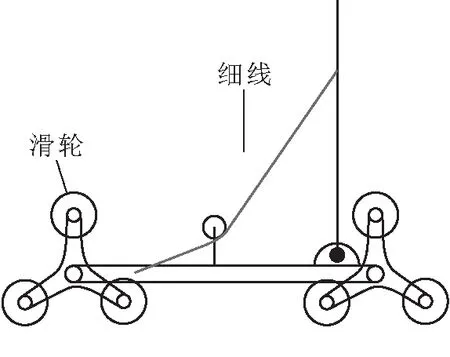
图 7 小车平地行走示意图

图 8 小车爬楼示意图
车上坡时,车身倾角改变,连杆保持竖直,杆—车之间距离增大,与之相连的细线带动销钉向内运动锁死中心轮1,从而使得轮系从平地运动状态转为翻转状态.图7、图8分别展示在斜面和平地上绳长度的变化.
车进入平地时,车身水平,细线端不再受力,此时弹簧将插销弹出,释放中心轮1的约束,小车水平运动.图9、图10为中心轮机构的三维示意图.

图 9 锁紧机构三维图

图10 锁紧机构简图
2.1.3连杆竖直模块因楼梯扶手的竖直高度一定,为保证整个装置能够正常工作,必须始终保持连杆竖直状态.采用一个重力适应的机构,配合滑轮来约束杆的竖直.

图11 车体在水平面状态图

图12 车体在斜面状态图
车体在水平面状态如图11,其中α为导槽与水平面的夹角.图12中,β为楼梯坡度.设 0<α<β.导槽中为配重,连杆顶端连接细线(图中灰线),通过两个定滑轮最后至配重.车体配重由蓄电池和水箱组成[4].

图13 车体爬楼配重三维示意图 图14 车体平地行进配重三维示意图
车体水平时(如图13),导槽与水平面存在倾角,配重处于导槽最右端,车体爬楼时(图14),由于α<β,配重处于导槽最左端.利用极限位置约束连杆的摆动,使连杆保持在一定范围内转动.此装置能保证无论是爬楼还是平地,连杆始终可以处于竖直状态.
2.2 擦洗机构
擦洗机构通过连接车载驱动搭载在扶手栏杆,其中有四个滚刷分布在栏杆左右两侧,卡住楼梯栏杆,与行进机构连接的罩体悬在扶手正上方,通过三角型导轮机构与扶手接触,使整个机构受力传递到小车,减少对扶手的磨损,同时能够顺利实现转弯.该机构在行进过程中完成起尘、吸尘、喷水、擦洗四个步骤,完成对楼梯栏杆扶手的擦洗.为方便转弯,将装置分为前后两节,中间用万向轴相连.前节与小车刚性连接,利用小车在行进方向的分力驱动;后节由于质量较小,仅靠万向轴提供的力拖动.
前节主要包括擦洗的毛刷和吸尘网.毛刷可将浮尘掸去,此时位于毛刷两边的吸尘板会把浮尘吸附于过滤网之上.后节主要由喷水和擦洗机构组成.第二节尾部由电机驱动刷子旋转清洗扶手.整个擦洗过程覆盖楼梯扶手和栏杆.
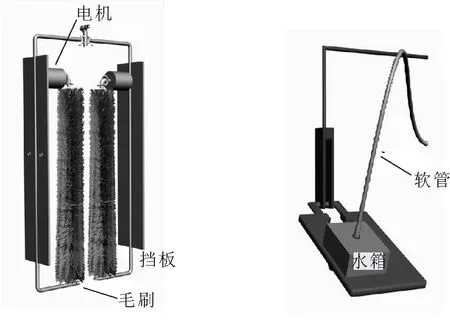
图15 毛刷结构示意图 图16 水箱软管示意图
图15为毛刷结构,两个对称的毛刷贴在扶手的护栏上,通过上方的电机驱动对护栏进行清洗,两侧为橡胶挡板结构,防止毛刷工作时污物飞出.图16是水箱和软管结构,水箱置于车体上,通过软管将水洒在扶手栏杆上,便于毛刷的清洗.清洗系统则主要由水箱、软管、毛刷以及驱动电机等组成.
2.3 转弯机构
转弯机构的作用:配合行进机构以便于顺利转弯.
设计了三角型导轮,该装置直接与扶手接触并自适应扶手形状,三导杆之间通过弹簧相连.机器工作时,导轮始终沿扶手运动,对车的方向起引导和约束作用,保证车与栏杆之间的距离;拐弯时,导轮自适应转弯半径,依次绕过弯角.
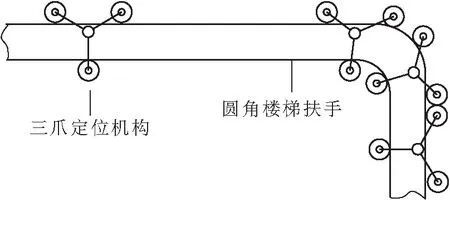
图17 定位机构通过圆角楼梯扶手示意图

图18 定位机构通过直角楼梯扶手示意图
三个互成120°的滚轮之间通过弹簧连接,可保证直走时卡在扶手上,转弯时各轮由于扶手对三爪定位机构的导向完成转弯过程.三爪定位机构通过圆角和直角楼梯扶手过程如图17、18所示,图19、图20展示了三爪定位机构,图21、图22模拟了机构真实工作状态[5].

图19 三爪定位机构

图20 三爪定位机构三维结构展示
小车采取三轮双驱动式,后轮分别用两个电机控制.前轮通过杆件约束,可绕内导轮转动;后轮用单片机控制电机转速,利用差速转弯.
3 结束语
本机高度自动化,除简单安装和擦洗完毕后拆卸过程需要人来简单处理,整个擦洗过程不需人为干预;独特的三角导轮设计可以帮助清洗机顺利地通过每层楼梯之间的任意角度弯道;星轮行星轮以及锁死机构的设计,可在小车爬楼、平地行走工作模式中自动切换(图20、21).
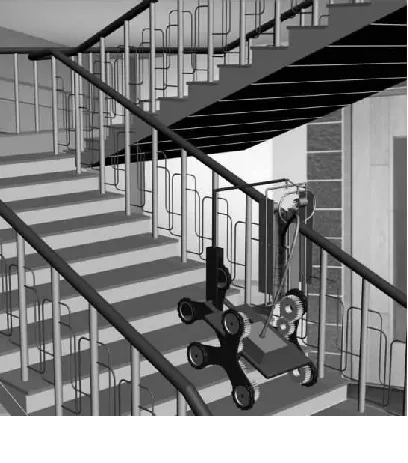
图21 三维结构示意图

图22 转弯状态三维结构示意图
本机构主要适用于学校教学楼、学生公寓、小区高楼以及各大商场楼梯的清洁,快速高效清洁家用楼梯、消防楼梯,过程高自动化、高功效,特别适用于工作量较大的小区清洁.该楼梯扶手擦洗机能够实现起尘、吸尘、喷水、擦洗功能.相比于普通的楼梯扶手擦洗装置,该装置擦洗效率更高,效果更好.该清洗原理可推广至高速公路栏杆的清洗.
[参考文献]
[1] 喻华玉,徐文澄. BRQ便携式软轴连接高压带电清扫机在国内的应用[J]. 西北电力技术,2002(5):18-21.
[2] 雷晓钧,陈 超,钱 浩,等. 小型垃圾清扫机的设计[J]. 科技信息,2013(3):66-67.
[3] 李立顺,孟祥德,詹隽青,等.基于SolidWorks的整体自装卸车虚拟设计与运动仿真[J].起重运输机械,2007(3): 21-23.
[4] 刘惟信.机械最优化设计[M].第二版.北京:清华大学出版社,1997.
[5] 陈定方,罗亚波.虚拟设计[M].第二版.北京:机械工业出版社,2007.
