机器人技术在淡水产养殖病害测诊中的应用初探
2013-11-12王廷轩张钦玉
王廷轩 张钦玉
(1.潍坊职业学院,山东 潍坊 261000;2.寿光市第一中学,山东 寿光 262700)
山东寿光市不仅是冬暖式蔬菜大棚的发祥地,以盛产无公害蔬菜闻名全国,而且寿光的北部具有辽阔的水域资源优势,形成了“南产蔬菜,北养鱼虾”的当地经济发展模式。随着水产养殖业的迅速发展,淡水养殖中鱼、虾病的发生越来越严重,使病原微生物的抗药性也越来越强,有的病害导致池塘绝产,严重挫伤了水产养殖户的积极性。为了解决家乡水产养殖的这一难题,研制水产养殖病害测诊机器人并在实践中应用,可有效提高养殖鱼、虾的免疫力,达到预防为主的科学效果。提高鱼、虾的成活率达12.5-17.3%,鱼单位面积提高产量82.1公斤,虾单位面积提高产量56.1公斤,被当地水产养殖户称为“水产大夫”。
1 主要研究思路
1)利用智能化信息处理系统代替人们在水中自由进行水环境指标的智能化检测和对水产养殖的生理状态诊治。
2)运用温度传感器、溶氧度传感器、pH值传感器等智能化系统进行水质环境的随机抽样检测。
3)利用太阳能电源为淡水养殖病害诊治机器人提供能量,节能环保。
4)通过编程设计,控制机器人在水产养殖环境中进行各项功能系统的运行。
2 淡水养殖病害测诊机器人的主要研制内容
2.1 能源供应系统
能源是水产养殖病害测诊机器人的动力,机器人的智能行走和升降系统、水环境检测系统、臭氧杀菌系统等多项功能的运行需要大量的能源。考滤水中环境复杂,能使其长时间工作,因此除了安装我们自己制作的的高储能电池,还为了节约能源和提倡环保,我们利用太阳能电池板的电能作为淡水养殖病害测诊机器人的能源,通过充电系统为病害诊治机器人进行能源储存,在水中为系统的运行提供充足的动力。
机器人的能源系统是太阳能电池板将太阳能转换为电能,通过高能电池存储能量,当机器人电量不足时,导航运行系统再控制机器人回到充电地点,自动完成充电对接,充电完毕后,机器人可继续执行上次未完成的任务。
2.2 控制系统
水产养殖病害测诊机器人的主控制器包括数据采集系统和数据处理系统两部分,在制作水产养殖病害测诊机器人的控制系统时,由于机器人主要在水中完成多项功能的运行,主控制系统我们选取功能齐全、可靠、集成度高的MC68HC908AP64微处理器;总线工作频率8M,64k flash存储器,8路10bit模拟输入口,4路timer输入,8位数据总线,一个普通SCI端口,一个红外SCI端口,一个SPI端口,一个通用并行I/O端口,具备中断和多种复位方式。该单片及功能强大,扩展能力丰富,通过其他逻辑芯片的扩展了5各数字量输入端口,5个模拟量输入端口和4个扩展槽。
该单片机内部集成了存储器,不用扩展存储器,我们可以写入机器人程序;64k flash存储器,存储容量较大,适宜于我们根据机器人的不同任务更换不同的执行程序。
该机器人的很多功能模块是基于这些通讯端口的,例如释放臭氧模块、无线通讯模块、环境检测模块等。
在软件编程研究中,我们应用MOTOROLA软件,它可通过编写C语言程序来开发高层应用软件。
2.3 导航系统
(1)导航系统
水产养殖病害测诊机器人的导航系统由数字指南针、角度传感器等部分组成。在导航方式上,我们使用设定航线行走的方式。即在机器人需要工作的路径上,在水中预先设计轨迹线路,机器人在行走时将通过调整角度方向,使机器人在池塘中按照设定路线行进,完成对水环境和养殖动物的行走检测和定时观察。另外,在机器人的内部安装一个数字指南针,它的主要作用是矫正机器人的运动方向。
(2)行进升降系统
机器人的行进系统主要是控制机器人在水中进行前进和转向,机器人的前进是通过步进电机的信息指令,推动机器人在水中向前行走和停止。通过角度传感器,控制机器人在行进中的转弯方向。另外,在机器人的体内还安装有一个升降器,当选定在池塘的某一位置让机器人进行一定时间的病情观察时,机器人将会停在设定位置,通过升降系统将病害测诊系统固定在一定位置进行观测,然后将观测后的信息传输到计算机上。
2.4 水产病害测诊系统
淡水养殖鱼或虾的生长过程中避免不了受到各种病原微生物的侵害,受到病原微生物侵害的水产品,会表现出系列的临床特征,如病鱼体表不光滑,体色发黑,鳞片不完整有脱落,鳍条末端腐烂,身体有些部位充血、腐烂,眼睛突出,有些眼睛浑浊,体表有寄生虫,正常鱼鳃盖闭合,病鱼鳃盖张开,鳃腔内有淤泥,鳃盖表皮腐烂,粘液增多等特征。机器人利用视觉系统,根据发病时状态的变化,将信息传输到特征栏上进行信息处理,诊断出发生病虫害的类型,确定实施不同的预防治疗方案。当水产动物在水中发生细菌、真菌和病毒等病害时,机器人跟踪病残鱼体进行检测系统发现有病变特征时,通过识别确认,机器人将自动更换不同方式,进行病害的防治。
2.5 臭氧灭菌系统
在水产养殖生产中,由于鱼、虾在水中的生长代谢,避免不了在水中会产生大量细菌、真菌、病毒、寄生虫等病原微生物,由于长期使用化学性药物,水中的多种微生物对化学药物容易产生抗药性,当水中发生真菌、细菌、病毒等动物病害时,机器人可利用臭氧灭菌系统产生臭氧,对水中的病原微生物进行防治。臭氧发生器的原理是机器人控制臭氧管的高压放电,使氧氧双键断裂生成臭氧,臭氧溶于水形成臭氧水。
臭氧是一种很强的氧化剂,能直接氧化分解病原微生物内部氧化葡萄糖所必需的酶,从而破坏细胞膜将细菌杀死,一定浓度的臭氧还可迅速杀灭顽固致病性的真菌、细菌,并且在水中和水产品中不存在任何残留物,没有二次污染。
2.6 水环境检测系统
在淡水养殖过程中,病害是一定的病原微生物,在一定的水环境条件下发生的。淡水养殖的水环境主要包括自然因素、人为因素和生物因素。运用淡水养殖病害诊治机器人可通过系列的信息传感器,及早检测池塘水环境的温度、PH值、溶氧度、有害气体、寄生虫等数据可以通过无线数传系统传输到PC机,通过PC机强大的数据处理功能,进行科学养殖和管理。
(1)水温检测传感器:水温不适,可使鱼体皮肤异常,影响抵抗力,导致各种疾病的发生,水产养殖在不同的发育阶段,对水温也有一定的要求。
(2)溶氧检测传感器:淡水养殖种类、年龄的不同,对溶氧的要求也不同,正常的溶氧度为4-14毫克/升,溶氧度低于3毫克/升,鱼会出现浮头现象,严重时会窒息死亡。若水中溶氧度过高,超过14毫克/升,鱼又会患“气泡病”。
(3)水质检测传感器:水体中的PH值、氨、氮、硫化氢和氯气等含量发生较大的变化。这些有害气体和物质集聚到一定数量后,水质恶化,会导致病原微生物的繁殖。
(4)放养状态监测传感器:放养密度不当和比例不合理,会导致饵料不足,营养不良,抵抗力减弱。
另外,在机器人的升降系统部分还加装了一个图像云台,机器人在行走过程中,通过旋转不断扫描淡水养殖的的生长状况,并把图像传回控制中心。
3 试验效果
为了进一步检验淡水养殖病害诊治机器人应用效果,我们分别在家乡附近的养鱼场、养虾场进行了不同地点的对比试验,试验结果如下:

表1 淡水养殖病害诊治机器人在养鱼场的对比应用效果(鲢鱼)
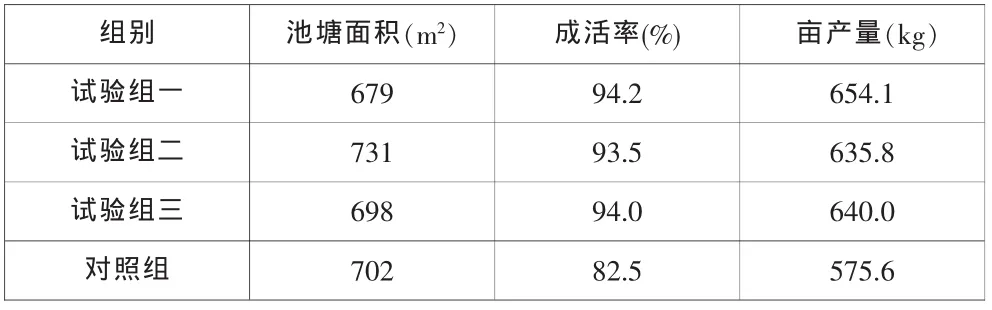
表2 病害诊治机器人在养虾场的对比应用效果(对虾)
试验表明,应用病害诊治机器人进行淡水养殖,不仅提高池塘中的成活率,增高单位面积的产量,还通过对比试验检测,能提高水产养殖的产品蛋白含量,减少水产品的药物残留。
