多功能电动护理床的研制
2013-11-09辛绍杰张欢欢马西沛
辛绍杰,张欢欢,马西沛
(上海电动机学院 机械学院, 上海 200245)
多功能电动护理床的研制
辛绍杰,张欢欢,马西沛
(上海电动机学院 机械学院, 上海 200245)
基于人体工学原理和现代机械设计理论,采用机器人化的多自由度结构、多轴协调控制设计多功能电动护理床。床面采用多折床面结构形式,通过按键控制完成平躺、抬背、坐起、屈或伸腿等基本动作,并具有翻身、辅助解便与多轴同步等功能。应用仿真分析技术,优化了多功能护理床的机构,使床的结构符合人体工学原理。设计基于单片机的控制器控制各机构的驱动电动机来满足使用者的功能要求。完成了多功能护理床样机的研制。
多功能护理床; 机构优化; 控制系统
机器人是继个人电脑之后的一个热门领域,其快速发展必将彻底改变人们的生活方式。面对智能服务机器人的巨大商机,发达国家纷纷出台相应的研究和发展计划。日本、美国和欧盟各国政府都加大了智能服务机器人领域的研究和开发投入,韩国也在大力推动家家都有机器人的计划。日本机械工程研究所(MEL)研制的护理机器人MELKONG、德国的Care-O-bot Ⅱ护理机器人、韩国的KARES Ⅱ护理机器人等在机器人的一些关键技术上面取得了重大进展。如机器人的停靠、行走、抓取、液压执行器、能源供给及人机界面;硬件和机构的模块化、软件库的可扩展性、交互式任务规划器、面向复杂操作的环境感知系统等方面。这些机器人主要完成一般的家政服务、行走辅助-通信与社会交流辅助等任务。在国内,服务机器人研究主要集中在各单项技术和单项功能方面。多功能护理床是针对长期卧床不起的老年人和病人的特殊需要而设计的,通过手控器能自主调节人在床上的体位的机电一体化产品,国内诸多单位和企业进行了研究,也取得了一些成果[1-14]。目前,我国人口已经逐渐进入老龄化,且我国的残疾人以及病人的比重也较高;因此,未来我国家庭对助老助残、照顾病人的服务机器人的需求存在巨大的潜在市场。
常见的护理床通常采用连杆机构的连架杆作为主动件来完成抬背、侧翻、屈腿等动作。但是根据人体工学,在通过连架杆来完成以上动作的时候,通常会由于人的转动中心和机构转动中心不一致,导致运动过程中人的背部有挤压或拉拖的感觉。本文根据《人体工程学图解》所提供的我国成年男性的身体各部位尺寸和现有护理床产品尺寸,确定连杆机构的初始设计尺寸。通过在转动中心附近设置柔性床板,依靠人体自身重力,使柔性床板贴近人身体,增大整体接触面积,避免在背部升起时的体位移动,利用连杆机构的连杆来驱动面板,以真实反映人的运动。
1 总体设计方案
护理床的结构框图如图1所示。床框架除了固定的机械机构以外,还包括各个电动机安装模块、辅助解便系统接口等模块。其中,机械机构包括:侧翻机构、抬背机构、屈腿机构、臀部坐板开合机构。床板由床板框架和床面板组成。整台护理床有7台电动推杆,分别完成前部升降、腿部屈伸、左右侧翻、臀部中部开合和马桶移动等动作。
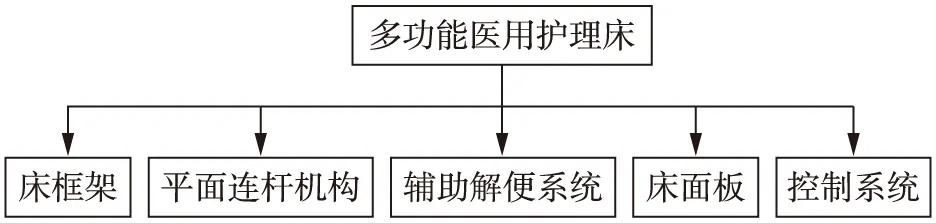
图1 多功能护理床框图Fig.1 Block diagram of multifunction nursing bed
1.1护理床的工作环境
护理床主要用于病房和家庭居室,考虑到上述环境对噪声的限制,故电动机类型及型号的选取应满足工作噪声低于20dB,并且在床体上附加一些必要的减震降音材料。
1.2护理床的位姿要求
护理床应有利于被护理人康复、生活自理所需的各种必要的体位、位姿。为了防止褥疮等一系列由于长时间卧床造成血流不畅所引起的并发症,护理床应实现床面的左右侧翻身。对于危重、高度瘫痪等生活上不能自理的病人,在设计时应考虑病人在床上可以坐姿或是卧姿排便。
1.3构思的提出
为了实现床面某一个特定的体位姿态,传统的设计方法是设计一套特定的机构与之对应。当位姿数目越来越多时,所需机构数目也随之增加,造成护理床体积增大。而床体的总体积是有一定限制的,即床体的长、宽、高尺寸必须符合有关护理床标准规定,这样才能够满足病人的舒适感要求和空间限制要求。多机构协调的技术是源于模仿人体的运动,人体的运动具有极大的柔性。受此启发将护理床的床面进一步加以细分,成为彼此之间相互独立的8个面板,如图2所示。通过各个床面板之间的协调运动,采用单动或联动方式来实现护理床所需的各种体位、位姿。
1.4相关要求与标准
为了满足患者在使用护理床时的舒适程度以及有效地减缓护理人员护理强度的要求。护理床结构在设计时应满足以下几个方面的要求。
(1) 能够实现护理所需的各种体位、位姿要求。
(2) 各个活动床面板的摆动角度范围应参照有关医疗护理要求和人体的舒适感要求,各床面板摆动角度及标准如下。① 背板摆动角度:0°~75°;② 左/右翻身板摆动角度:0°~75°;③ 左/右臀部板摆动角度:0°~75°;④ 左/右臀部板前后摆动角度:0°~-5°;⑤大腿板摆动角度:0°~-35°。
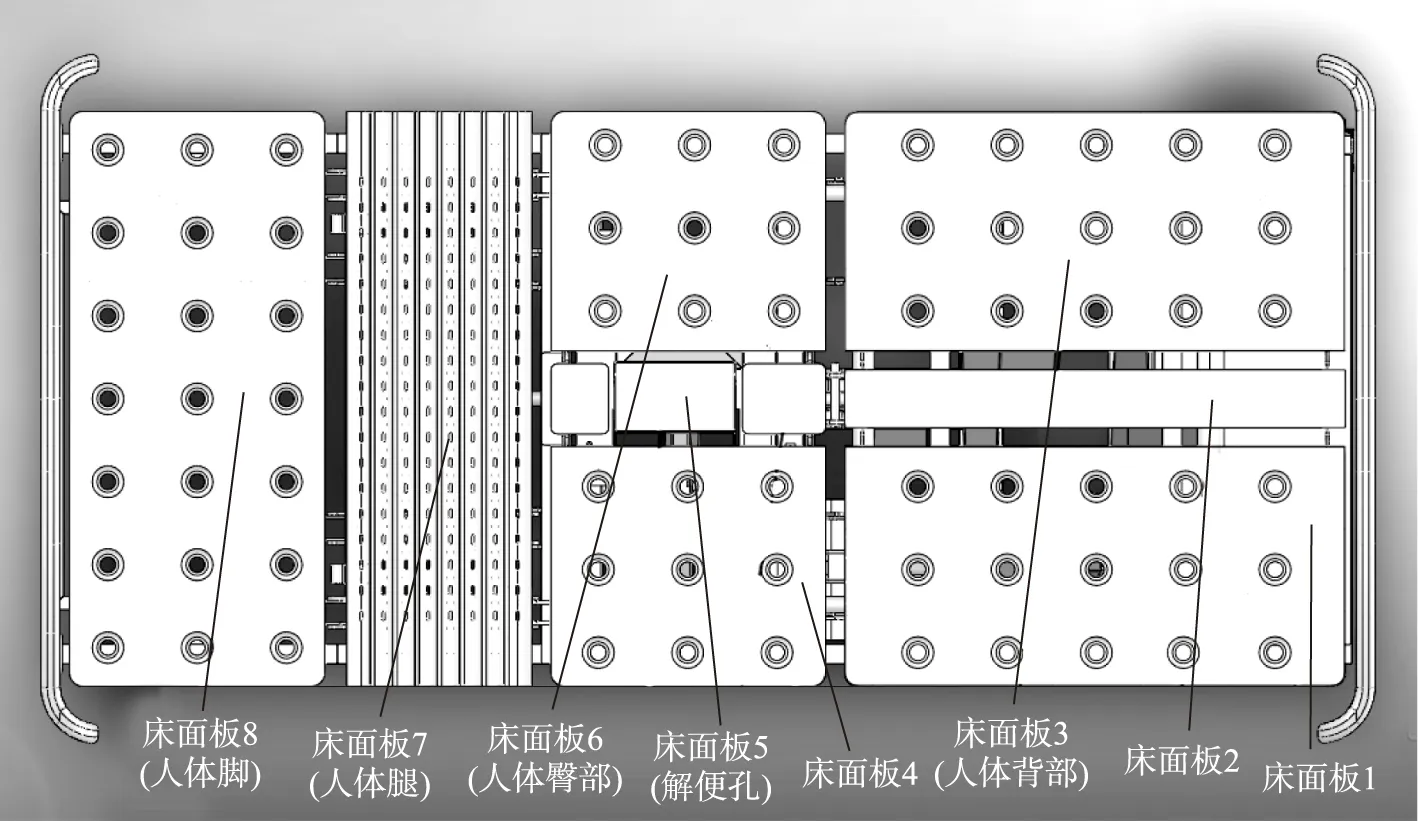
图2 多功能医用护理床床面板图Fig.2 Bed panel of multifunction nursing bed
(3) 护理床床体的可靠性、稳定性和安全性要符合医护要求。
(4) 床体的结构尺寸有一定的空间范围限制。
(5) 要考虑护理床在房间内移动的简易性以及护理床医护辅助装置(如吊液架、书饭桌)在护理床上的可安装性。
1.5电源及电动机驱动形式
考虑护理床使用的安全性,采用24V直流电,为护理床的电路控制系统、电动推杆以及其他相关部分提供驱动电源。选用的电动推杆的最大推力为6kN,最大拉力为4kN,工作速度为5.5mm/s。
1.6护理床控制系统
控制系统主要由微控制器、各电动机驱动器、各执行电动机等部分组成,其组成结构如图3所示。按键操作器分为两个功能模块,一个为操作护理床所用,另一个为操作辅助解便系统所用。护理床的操作器上共有12个按键,分别完成相关动作。通过两个操作器完成护理床的全部动作,方便护理人员和病人实现自行监护。

图3 护理床的控制系统结构Fig.3 Structure of the nursing bed’s control system
2 护理床机械机构设计
护理床包括:床体部分、运动机构部分、动力部分和电源部分、控制系统和辅助解便装置。护理床机器人沿床身设计成4折床板结构(背板、臀板、腿板、脚板),其中腿板为软连接。背板和臀板、腿板和脚板各由一个线性推杆驱动,根据人的需要,两个线性推杆同步联动。辅助解便装置为一独立装置,辅助解便装置的功能键启用通过中间臀板的下摆来实现。
2.1侧翻机构
侧翻机构是实现患者在护理床上的左右翻身。
2.1.1 侧翻机构的结构 侧翻机构采用双4杆机构,由双电动推杆驱动,其机构简图如图4所示。电动推杆推动侧翻构件绕着床架发生转动,通过滚子的作用,使得背部侧板绕着它与中部床板的铰接点为转轴发生转动。侧翻示意如图5所示。
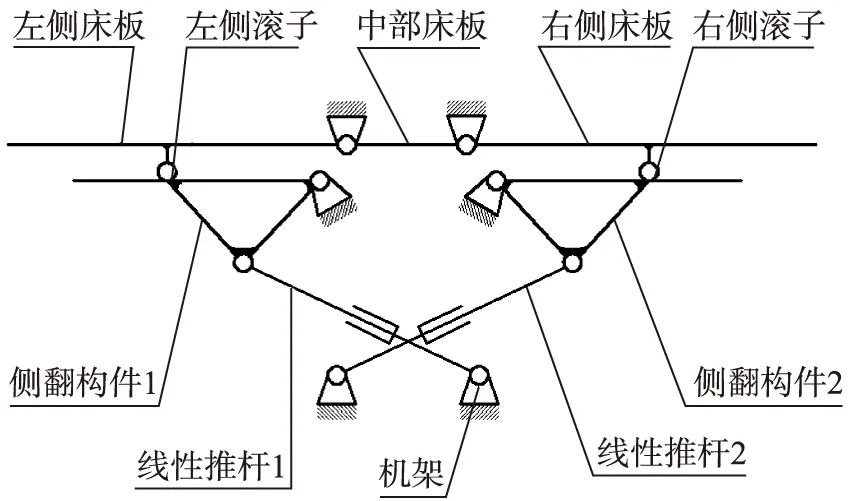
图4 侧翻机构Fig.4 Rollover mechanism
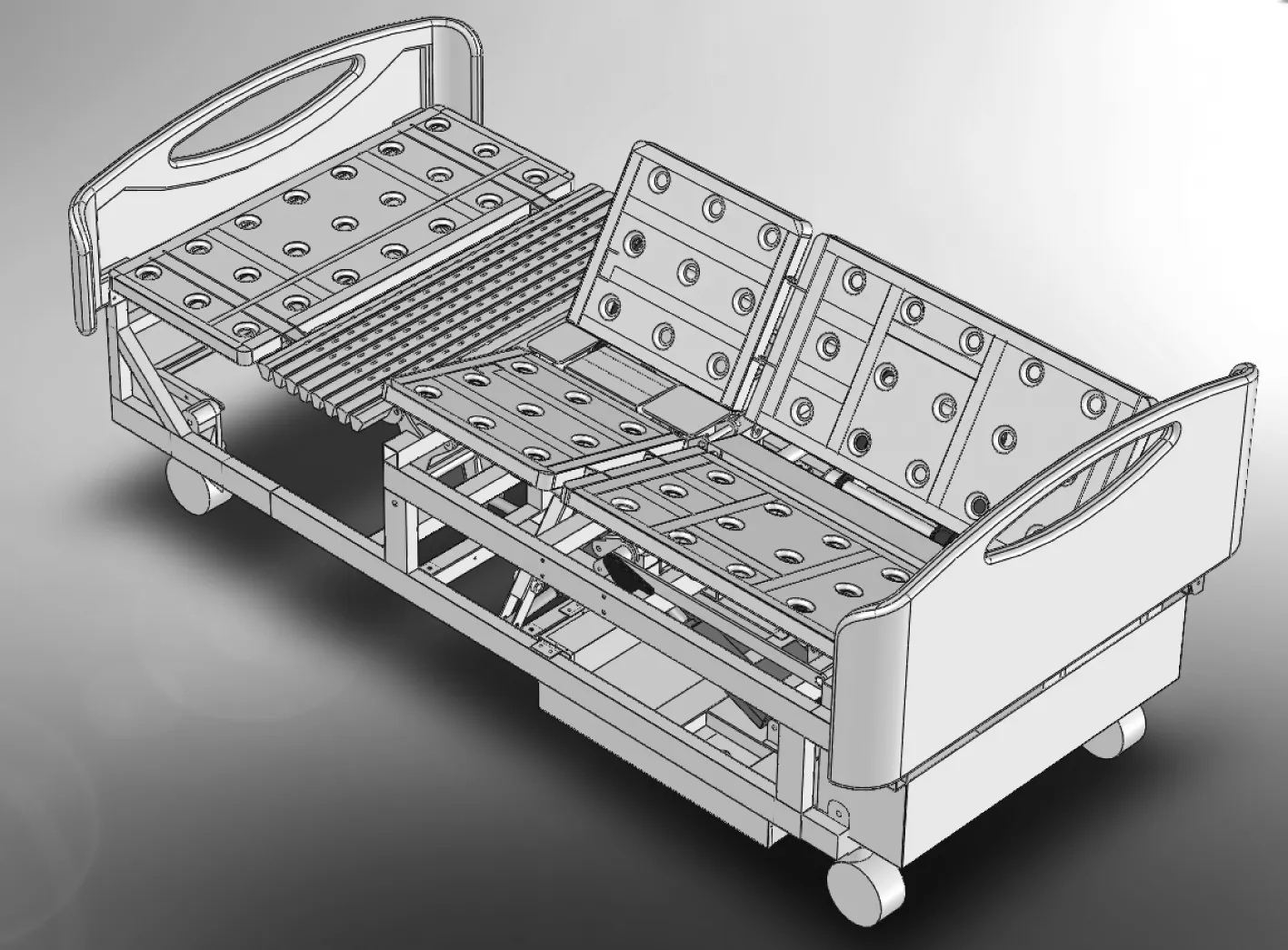
图5 侧翻示意图Fig.5 Schematic diagram of rolling over
2.1.2 侧翻机构的优化 机构的驱动器采用电动推杆,且有一定的安装尺寸要求。另外,床面高度,侧翻机构的侧翻角度也有一定的要求。设定线性推杆的初始长度为278mm,机架的最大高度230mm。按照图解法确定各构件的尺寸和固定铰支点的位置点,将这些数据定义为初始设计变量。根据这些数据设计侧翻机构运动简图,并选定如图6所示的5个关键点,在Adams中通过各初始设计变量,完成整个样机的建模,如图7所示。
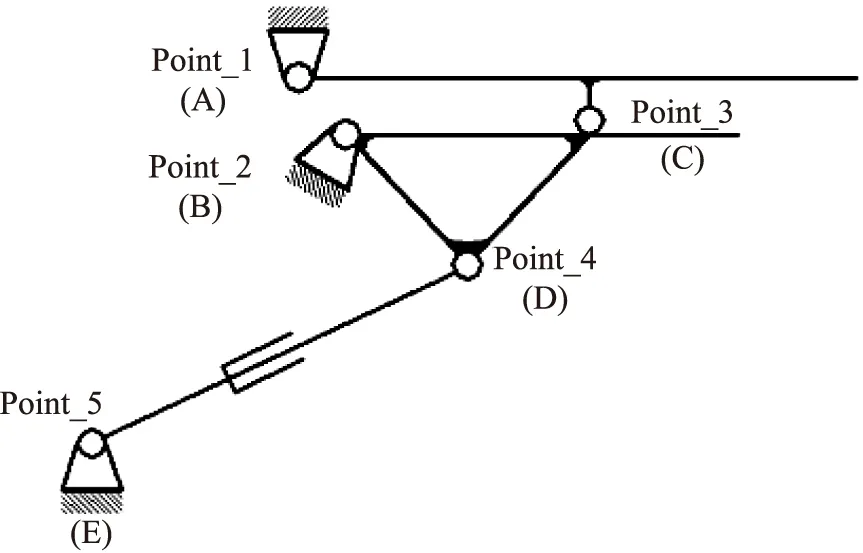
图6 模型中的关键点Fig.6 Key points in the model
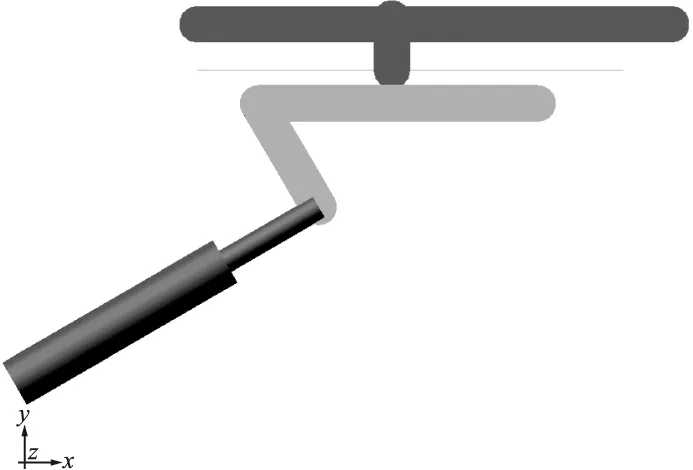
图7 侧翻机构在ADAMS建模Fig.7 ADAMS modeling of rollover mechanism
通过ADAMS[15]提供设计研究模块,分析各个设计变量的变化对侧翻背板角加速度的影响,从中找出对侧翻背板角加速度影响较大的3个设计变量。随后,样机以侧翻背板的角加速度的最大值、最小化为目标函数,建立运动学方程,进行优化设计。优化前后的结果如图8所示。通过对比,很容易发现优化后角加速度明显减小,图中实线为初始角加速度曲线,虚线为优化后曲线。
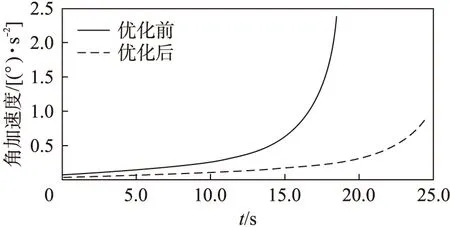
图8 优化前后角加速度对比Fig.8 Comparison of angular acceleration before and after optimization
优化之后主要变动B点的安装尺寸及BD杆的长度,具体变化见表1。
2.2抬背机构
抬背机构是实现患者在护理床上的抬背及端坐功能。
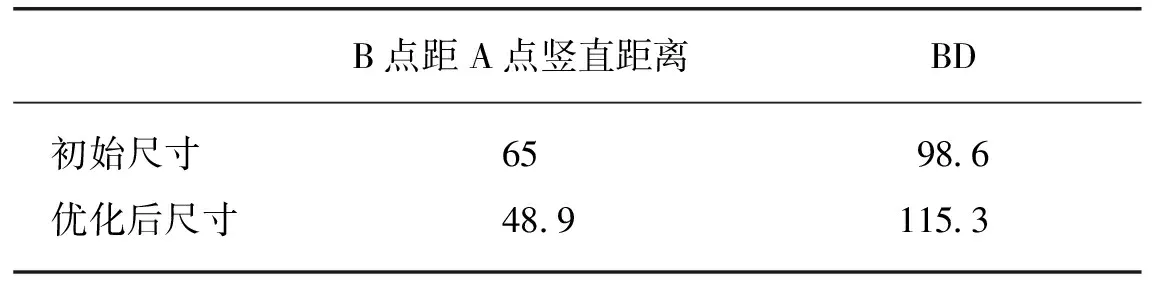
表1 杆件尺寸变化表
2.2.1 抬背机构的结构 抬背机构为一个摇杆滑块机构,采用单线性推杆驱动,实现护理床的抬背功能。但传统的抬背机构在抬背的同时会有滑移的现象,设计时在摇杆滑块机构中加入一个摆杆,使得在抬背的时候,臀部会伴有轻微的下降,克服了患者的滑移现象。其机构简图如图9所示。
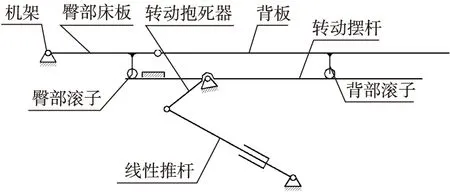
图9 抬背机构简图Fig.9 Schematic diagram of back-lifting mechanism
线性推杆运动通过连杆机构使背板绕着转轴产生摆转运动,实现了抬背的功能;与此同时,由于摆杆的转动,臀部滚子沿着摆杆向下滚动,使得臀板绕着轴转动,实现了落臀的功能;当摆杆继续摆动,背部被继续抬高而臀部滚子脱离摆杆,臀板接触到臀部挡板,臀板搭于臀部挡板上方,完成了整个抬背动作;当反向运动至床板水平状况时,摆杆接触于床架上而转动抱死器,由于单向抱死摆杆,使得在反转到水平位置时,转动抱死器仍能发生转动,从而起到了保护电动机的效果,实现了在平常的状态下不受力。抬背屈腿联动如图10所示。
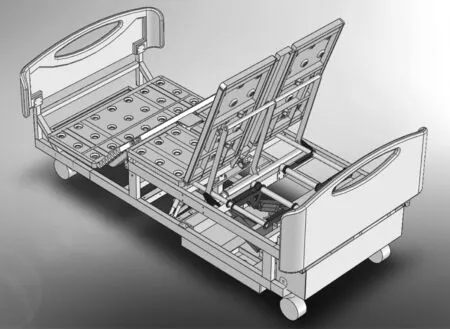
图10 抬背屈腿联动示意图Fig.10 Schematic diagram of linkage of back-lifting and leg-bending
2.2.2 抬背机构的参数优化 抬背机构中各关键点的位置如图11所示。选取对侧翻背板角加速度影响较大的设计变量做进一步的优化设计,优化设计的目标函数以背板翻转角加速度的最大值、最小化作为设计目标。本机构选择了4个设计变量作为优化的变量值,建立运动学方程,如图12所示。背板的角加速度得到了改善。根据优化后的数据,可得优化前后的连杆尺寸对比见表2。
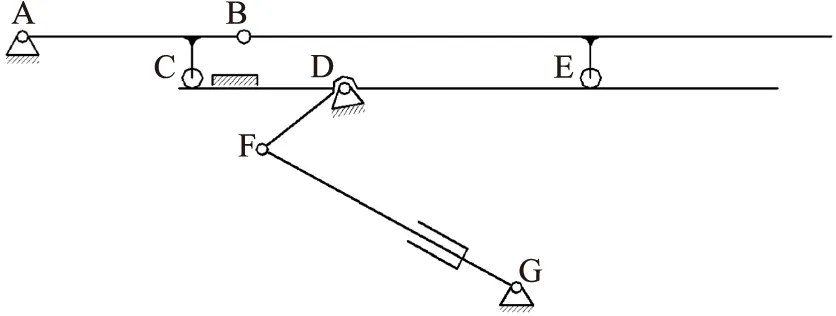
图11 抬背机构各关键点Fig.11 Key points of back-lifting mechanism
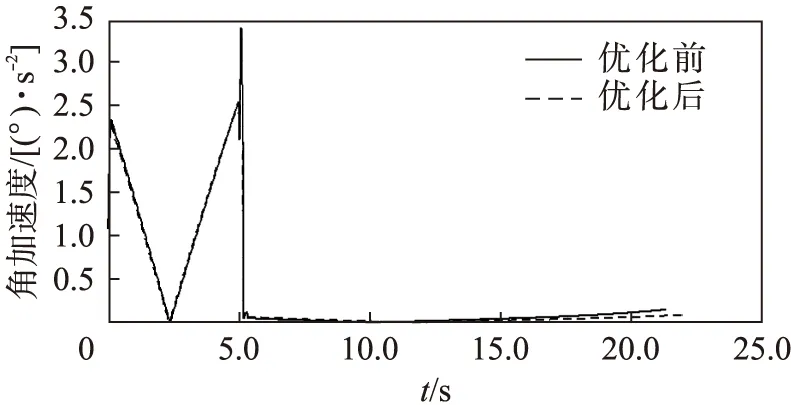
图12 抬背机构优化前后背板角加速度对比Fig.12 Comparison of angular acceleration before and after optimization of back-lifting mechanism
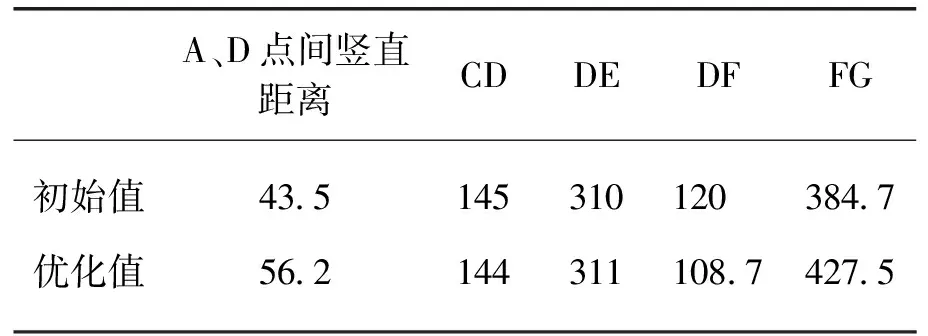
表2 优化前后机构连杆尺寸对比表
2.3屈腿机构
屈腿机构主要实现腿部床板的向上和向下弯曲。在向上弯曲的时候,腿部床板要求有一个圆弧;在向下弯曲的时候,脚板必须严格的保持水平下降。
2.3.1 屈腿机构的结构及工作原理 多功能医用护理床的屈腿机构是一个连杆机构,采用单线性推杆驱动,实现屈腿这一动作,机构简图如图13所示。
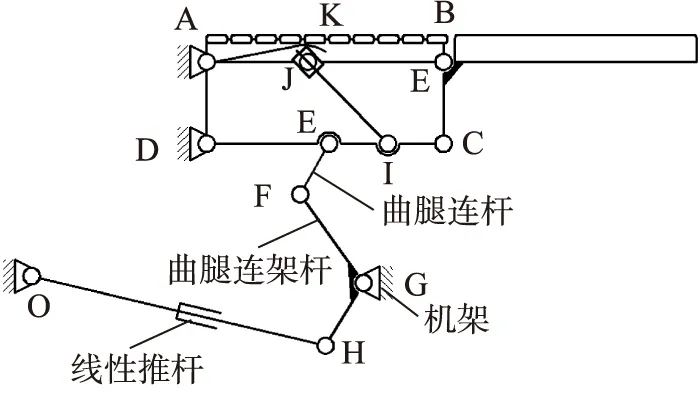
图13 屈腿机构及各关键点Fig.13 Key points of leg-bending mechanism
多功能医用护理床的屈腿机构包括:屈腿连架杆I、屈腿连架杆I延伸段、屈腿连杆、平行四边形杆组、腿部可弯曲床板、脚板、脚板延伸支架板及所涉及的部分机架。
平行四边形杆组的两端分别铰接于机架,另一端与床板铰接,曲线连杆自身具有弹性伸缩功能,两端分别于平行四边形杆组上部杆的两端进行铰接,线性推杆的一端与连架杆一端铰接,通过线性推杆推拉来实现床板的上下移动。当推杆缩短时,平行四边形机构往上运动,使得IJ连杆从滑块中伸出,推动AK连杆往上摆动,带动曲线连杆的弯曲动作,达到图14所示的上屈腿功能。当推杆伸长时,平行四边形机构往下运动,IJ连杆从滑块中缩回,对曲线连杆不作用,实现如图15所示的下屈腿的功能。
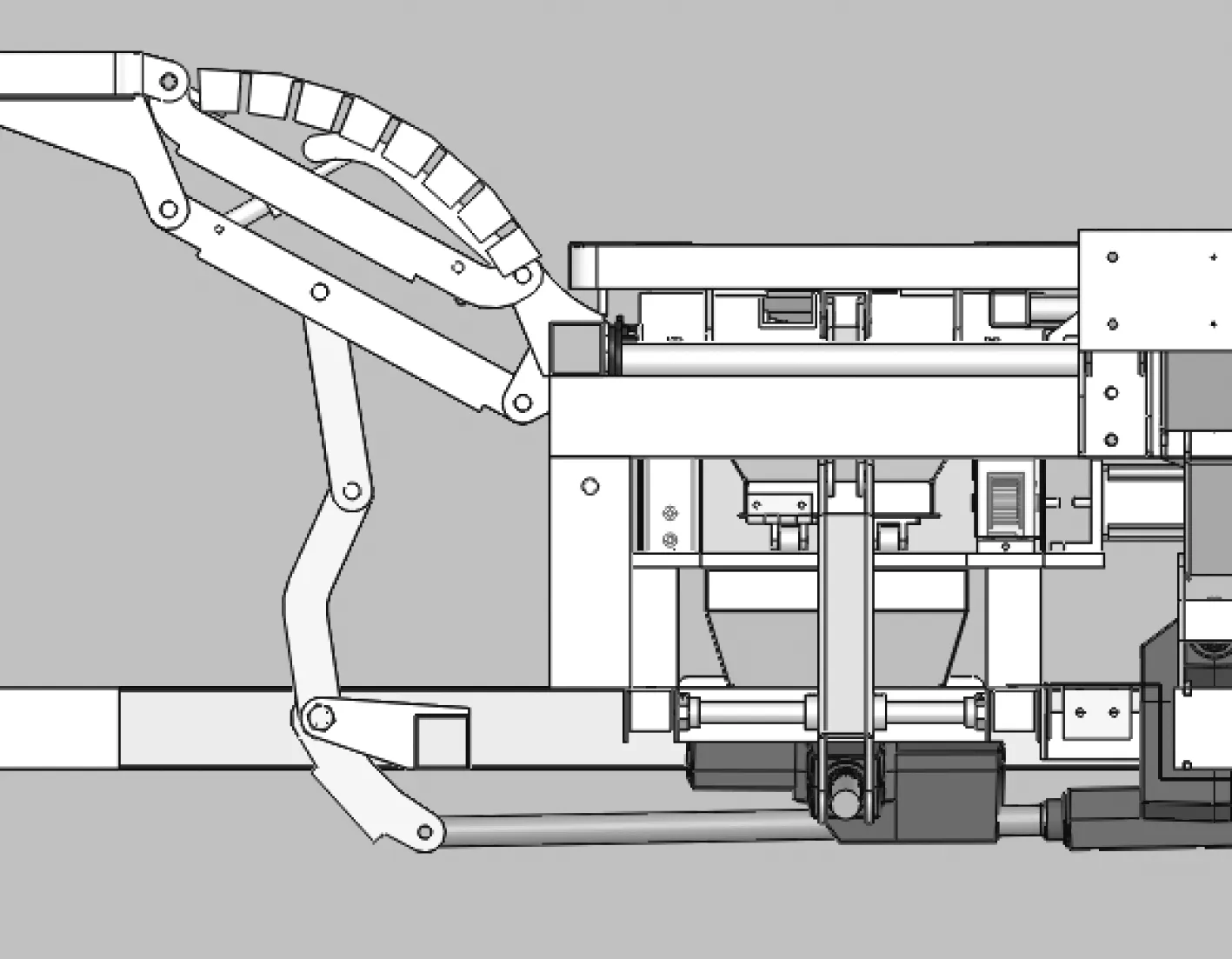
图14 多功能护理机器人上屈腿示意图Fig.14 Schematic diagram of upper-leg bending of multifunction nursing robots
图15 多功能护理机器人下屈腿示意图Fig.15 Schematic diagram of lower-leg bending of multifunction nursing robots
2.3.2 屈腿机构的参数优化 对图13所示的屈腿机构中各个关键点的坐标值建立设计变量,以小腿板转动角加速度最大值的最小化为目标函数,并进行优化设计。优化前后机构杆件尺寸对比表如表3所示。
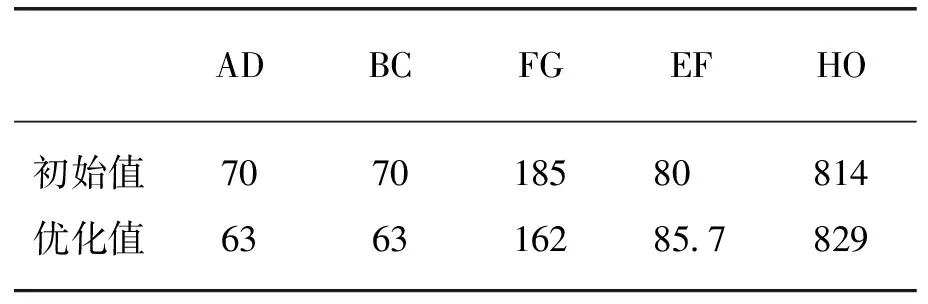
表3 优化前后屈腿机构杆件尺寸变化表
由图16可看出,屈腿机构经过运动学优化之后,机构的运动学性能得到了显著的改善,其角加速度的最大值由原来的1.0°/s2减小为优化后的0.46°/s2。由此可知,经过运动学优化之后,机构的整体的运动学特性得到了改善。
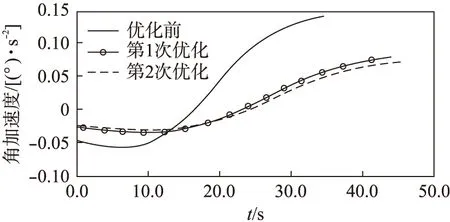
图16 屈腿机构运动学优化前后腿板角加速度曲线Fig.16 Angular acceleration curve of leg-bending mechanism before and after optimization
3 辅助解便系统
辅助解便系统帮助老人在不下床的情况下,通过按键操作辅助完成解便过程,系统如图17所示。接便模块的功能是完成接便容器的左右移动,并在病人需要解便时通过步进电动机驱动接便容器及时移动至病人臀部下方。当病人解便完之后,接便容器移动至原位,并自行倾倒排泄物以及清洗解便容器。臀部清洗模块通过 24V 微型直流电动机驱动同步带传动,控制喷头的伸出与回缩。通过水泵提供压力水,对臀部进行冲洗。水箱模块对水箱内的洁净水进行加热,经水泵输出洁净温水清洗病人臀部。烘干模块产生暖风对臀部进行吹干,防止因潮湿而使病人患上其他疾病。除臭模块通过吸风机将臭气吸掉再经活性炭过滤,排放至空气中。
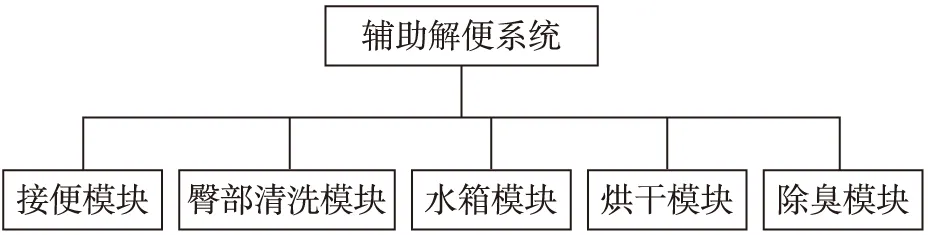
图17 护理床机器人辅助解便系统组成框图Fig.17 Block diagram of robotic excretion-assisting system components
辅助解便系统工作顺序如图18所示。
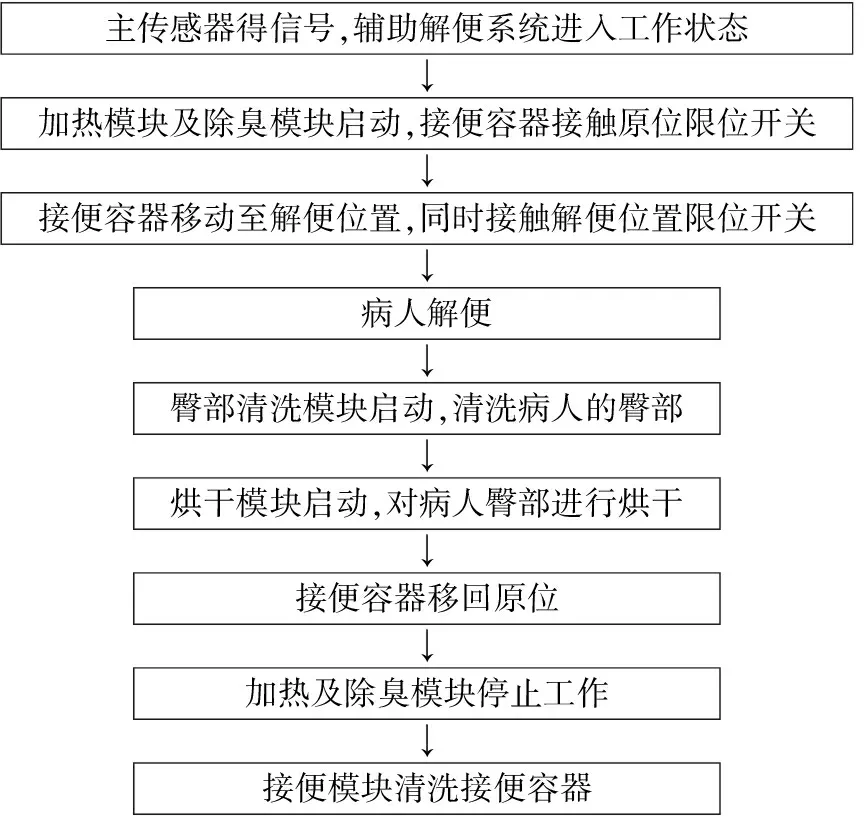
图18护理床机器人辅助解便系统工作顺序图
Fig.18 Flow chart of robotic excretion-assisting system
辅助解便系统的机械结构如图19所示,通过电动机带动皮带轮,由皮带来完成便盆的移动功能,利用一个线性推杆驱动一个杆机构,来完成解便床板的开闭功能。
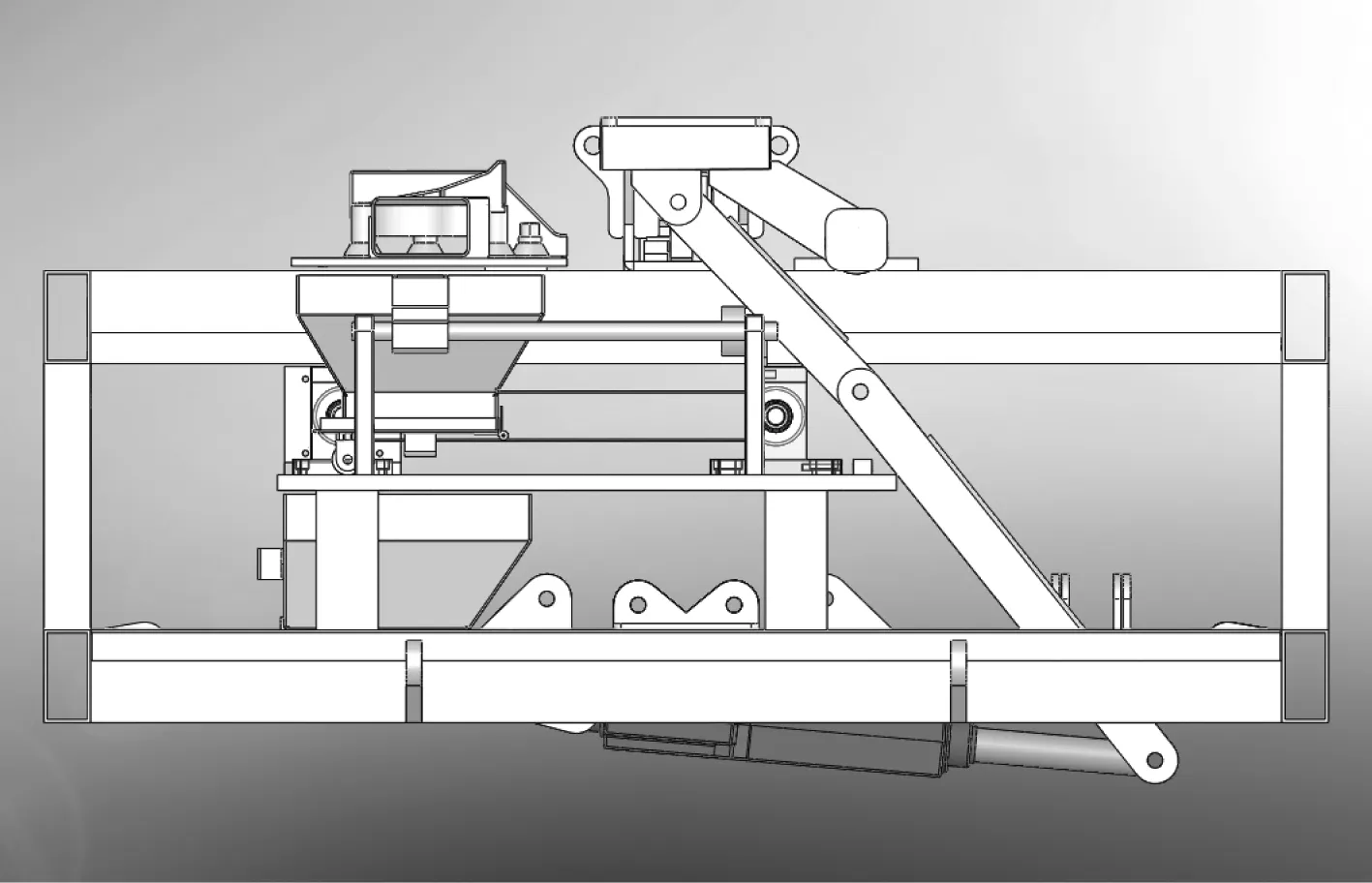
图19 护理床机器人辅助解便系统结构示意图Fig.19 Schematic diagram structure of robotic excretion-assisting system
4 护理床的控制系统
功能护理床的控制系统主要由微控制器、通讯模块、各电动机驱动器、各执行电动机等部分组成。
为了便于控制系统对护理床进行智能控制,及时了解护理床的当前工作状态,在护理床的床身上安置了传感器。通过传感器采集的数据,控制系统可以实时了解控制床面板的运动状态,防止不同机构的干涉对床体以及人员造成不必要的伤害。在控制系统最终确定之前,应完成护理床的结构设计、运动学和动力学的分析。在床体体位的控制方式上,采用通行的键盘按钮输入方式,操作者可以用按键指令操纵护理床的运动。护理床的控制模块由一个单片机控制系统构成,可采用多种方式控制多功能护理床的所有动作,注意抬背动作必须在左右水平的前提下实现。
护理床控制器采用以AVR单片机为核心的控制方案,其印刷电路板PCB,如图20所示。
图20 护理床控制系统PCB图Fig.20 PCB of nursing bed’s control system
5 样机制作
根据机械结构优化后的尺寸和开发的控制系统的软硬件,完成了如图21所示的多功能护理床的制作,样机的各运动参数符合设计要求。样机的试验表明,所研制的护理床的性能符合要求,并经历了“上海世博会”历时半年的工作验证。

图21 多功能护理床机器人样机Fig.21 Prototype of multifunction nursing bed robot
6 结 语
结合人体工学和机械学原理,基于ADAMS软件,根据图解法得到的电动床的初始设计数据建立了虚拟样机模型,经过运动学优化之后,得到了满足机构运动要求的参数及尺寸。基于单片机技术,研制了护理床的控制器。该电动床的背板、腿板与臀板采用软连接,使得抬背、屈伸腿功能较好的满足了使用者体位变换的要求,同时也实现了平躺、端坐下屈腿、端坐平腿、平躺上屈腿和平躺下屈腿等功能。研制的样机的试验验证了这些使用功能。
[1] 汪 烨.多功能电动护理床控制系统研制[J].制造业自动化,2009,31(6):70-71,81.
[2] 张春梅,张灿灼.多功能医疗护理床的研制与应用[J].医疗设备信息,2006,16(8):15-16.
[3] 姜生元,胡艳娟,李建永,等.智能化多功能电动康复床的研制[J].机械设计,2008,18(5):61-62.
[4] 张建国,谭云丽,薛 强.基于人机工程的多功能护理床设计[J].制造业自动化,2010,32(6):88-90.
[5] 张欢欢,辛绍杰.基于ADAMS的多功能床的结构参数优化[J].上海电动机学院学报,2008,11(3): 197-200.
[6] 卜薇薇,郦鸣阳,喻洪流,等.具有防坠床功能的智能护理床的研制[J].中国组织工程研究与临床康复,2007,11(48):9765-9767.
[7] 张晓玲,张京伟.医用护理床的设计[J].医疗卫生装备,2011,32(6): 36-37.
[8] 周慧强,谢存禧,张 铁.机器人化多功能护理床实用双机系统的设计及实现[J].机床与液压,2006,19(6):33-36.
[9] 江 豪,王 威,刘永平.多功能护理床的研究与开发[J].微计算机信息,2006,22(7): 117-119,193.
[10] 宁 萌,孙江宏,郝静如.新型多功能自动平衡护理床的设计与运动学分析[J].CAD/CAM与制造业信息化,2010(9):53-56.
[11] 王志燕,朱晓群,杨 晶,等.不同翻身角度对老年卧床患者皮肤受压及生命体征的影响[J].护士进修杂志,2009,24(7):581-582.
[12] 张建国,郭艳萍,薛 强.多功能电动床水平抬升机构的运动学分析及仿真[J].现代制造工程,2011(11):72-77.
[13] 张 铁,谢存禧,周惠强,等.一种机器人化的多功能护理床及其控制系统[J].华南理工大学学报:自然科学版,2006,34(2):47-51.
[14] 翟敬梅,徐 晓,刘 春,等.一种新颖的智能健康监护床设计研究[J].机械设计,2010,27(8):35-37,82.
[15] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006:8.
Development of Multifunction Electric Nursing Bed
XINShaojie,ZHANGHuanhuan,MAXipei
(School of Mechanical Engineering, Shanghai Dianji University, Shanghai 200245, China)
A multifunction electric nursing bed has a robotic structure with multiple degrees of freedom, and uses coordinated multi-axis control.The nursing bed is designed based on ergonomic principles and modern mechanical design theories.The bed panel uses a multi-folding structure.Basic movements including lying, back-lifting, sitting up, and leg flexion and extension can be completed through button control.Besides, the bed has various functions such as turning and excretion assistance, as well as synchronization between different axes.Simulation analysis is performed to optimize the structure to meet ergonomic requirements.A controller based on a single-chip microcontroller is used to control drive motors of corresponding mechanisms to fulfill functional requirements of users.A prototype is developed.
multifunction nursing bed; mechanism optimization; control system
2095-0020(2013)06 -0322-08
TH 789
A
2013-10-02
国家863高技术研究发展计划项目资助( 2007AA041604);上海市教育委员会重点学科资助(J51902)
辛绍杰(1963-),男,教授,博士,主要研究方向为机械设计及理论,E-mail:daqxinsj@163.com
