电力系统中机器人的研究现状与展望
2013-11-09郑盼龙迟冬祥
郑盼龙,迟冬祥
(上海电机学院 a.电气学院, b.电子信息学院, 上海 200240)
电力系统中机器人的研究现状与展望
郑盼龙a,迟冬祥b
(上海电机学院 a.电气学院, b.电子信息学院, 上海 200240)
研究了机器人技术在电力系统领域的典型应用,包括核电站与变电站巡检机器人、架空线巡检机器人及电缆管道机器人等;介绍了各类电力系统机器人的技术实现方法及其存在的问题,指出了电力系统中机器人的发展方向。
机器人; 电力系统; 智能化; 巡检
电力系统由发电厂、变电所、输电线、配电系统及负荷等组成,是现代社会中最重要、最庞杂的工程系统之一。由于对电力供应具有高度的依赖性,故人们总希望将电力系统故障减到最小。为使电力系统能够安全、可靠地工作,对其各个组成部分进行巡检、维护是十分必要的,主要包括对发电厂、变电系统和输电系统部分的巡检和维护。
发电厂是将自然界蕴藏的各种一次能源转换为电能的工厂。目前,发电厂中各部分的检查与维护仍然依靠人工完成;而应用于核电站的巡检机器人已经出现。
变电系统是电力生产、输送、分配3大系统的核心之一。采用新技术、新手段以减轻变电站值班人员的运行维护负担,有效保障设备安全可靠运行,成为今后面临的主要问题之一。输电系统主要包括架空输电线和地下输电线。架空输电线路是电力系统的“动脉”,它不仅要承受固有机械载荷和电力负荷的内部压力,而且还要经受自然环境的各种外部侵害。传统的架空输电线路并不适合人口密集的都市,故具有美化市容、比较安全等优点的地下输电线路应运而生。地下输电线路多采用电力电缆,为确保进入电缆隧道内的作业人员的安全,需要对电缆隧道进行各种保护检测,并采取定时定点检查措施,避免发生事故。若引入机器人对上述部分巡检,不仅可以提高效率,还能减少巡检工作人员的安全隐患。
在整个电力系统的大量巡检任务中,人力成本的支出十分巨大,非常有必要开发一种可以取代人工方式管理和巡检的机器人,用于电力系统的检查与维护,从而确保电力线路的安全运行。本文介绍了包括核电站与变电站巡检机器人、架空线巡检机器人、电缆管道机器人等电力系统机器人及相关技术实现方法、存在的问题,展望了未来面向电力系统的机器人的发展方向。
1 核电站与变电站巡检机器人
核电站与变电站的巡检工作都是在结构化封闭的环境中进行的,对机器人的设计有相似的要求。
1.1核电站巡检机器人
与运用化学燃料发电相比校,核反应发电所释放出的能量要高得多。虽然核燃料体积小,运输与储存方便,费用比煤便宜,对大气污染少,但核电厂的反应堆内存在着大量的放射性物质[1],需要机器人替代维修人员从事高放射环境下的工作,主要包括燃料池水下检修、水下异物清理,堆芯重要设备应急修复等工作[2]。
在由地震引发的日本福岛核电站事故中,美国和日本先后派遣机器人对核电站实施救援。美国iRobot公司的PackBot机器人主要用于日本福岛核电站1#、2#、3#机组室内、室外的状态监测,包括拍摄图像,辐射剂量、温湿度、氧气浓度等的测量。PackBot机器人尺寸约700mm×530mm×180mm,约35kg,最大速度为9.3km/h,最大不间断续航时间为4h。日本千叶工业大学研发的Quince机器人(见图1)主要用于日本福岛核电站放射性水平的测量、现场图像回传等。Quince机器人主要由本体履带机构、4个独立子履带机构、低重心设计机构等构成。它可以实现2km 远程控制,续航时间约2h,特定情况下可延长到6h[3]。

图1 Quince机器人Fig.1 Quince robot
文献[4-5]中介绍了一种维护和巡检机器人(Maintenance amp; Inspection Robot, MIR)履带式核电站检修机器人。其由三自由度机械手和履带式移动平台组成,利用专家系统能自主地在核电站环境中避开障碍物和完成设备检修等工作,并保证工作的及时性、准确性和安全性。该检修机器人可以适应不同的环境,具有可靠性高、适用性强等特点。
上述核电站巡检机器人都具有较高的耐辐射能力,尤其是电气电子部件(包括电荷藕合器件(Charge Coupled Device, CCD)相机、通信设备等)在高辐射下能保证工作顺利进行[3]。
1.2变电站巡检机器人
变电站巡检机器人系统因其灵活的控制和运行方式、不受天气因素影响等优点,为确保变电站设备安全运行发挥了一定的作用[6]。变电站机器人主要有轮式和履带式两种类型。
文献[7-8]中对一种用于变电站巡检的轮式机器人(见图2(a))进行了详细论述。该机器人携带有普通相机和红外线热像仪,用于探测设备的故障;它能够沿着变电站内部设定的白线自动行走,且在可能的关键地点拍照取像;在任意时间以遥控指令或按预设方式对变电站设备进行巡检,通过声音采集和识别,及时发现设备外观如破损、渗漏油等问题,并对设备的热缺陷进行判断和报警。在巡检过程中,若发现有人或动物进入变电站,能立即报警,故其还具有保安的作用。该机器人采用6节5#电池串联,经稳压器稳压后给各模块供电,其缺点是不具有自动充电的功能。图2(b) 为履带式的变电站巡检机器人,其工作过程与轮式机器人类似,其越障能力、地形适应能力较强,然而速度、效率相对较低,运动噪声较大。
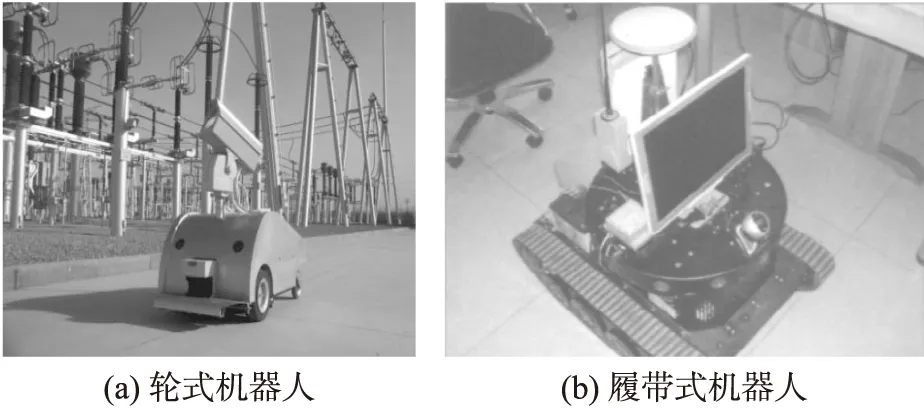
图2 变电站巡检机器人Fig.2 Inspection robots in a transformer substation
目前,自动导航和自动充电技术是轮式和履带式机器人实现自治的关键技术。机器人的导航方式有很多,如基于光电传感器的反光带导航,基于磁传感器的磁轨迹导航、电磁轨迹导航,基于电子罗盘(或陀螺仪)和编码器的惯性位置导航,基于全周扫描激光测距仪的导航,以及基于GPS的导航等[9]。文献[7-8]中的机器人采用的是基于磁传感器的磁轨迹导航方式,实验证明在不同环境下,其稳定性较高,但缺乏灵活性,轨道铺设的时间和资金成本较高。
要实现变电站的无人值守,机器人的自动充电功能是必不可少的。目前,只有少数几款机器人能够在无人工干预的情况下自动充电。文献[10]中介绍了一种为变电站巡检机器人设计的特殊的机械装置,允许机器人在位置、方向与标准充电位置不重合(±5cm、±5°)的情况下,实现自动充电。
近年来,无线充电技术迅猛发展,为巡检机器人的自动充电技术开辟了新的途径。无线充电技术被广泛应用于便携式设备、电动汽车等多个领域。磁共振技术由于其宽松的充电距离要求,非常适合用于巡检机器人平台的无线充电。与有触点充电相比,由于无线充电无裸露金属触点,故其更安全、可靠且防潮,非常适用于复杂环境下的充电。对于巡检机器人,无线充电要解决的主要是定位问题,即充电线圈与机器人平台线圈的对正问题。
2 应用于输电系统的巡检机器人
输电系统是将电力由发电厂传输到输电网络的系统;其线路主要有架空输电线路、地下输电线路和海底电缆。巡检机器人主要是针对架空输电线、地下输电线的巡检和维护。
2.1架空线巡检机器人
架空电力线是长距离输送、分配电能的主要通道和工具,其直接影响到电力系统的可靠性。电力线路巡检的机器人主要有沿线路爬行机器人和飞行机器人。
2.1.1 沿线爬行机器人 由文献[11]中的研究成果可见,无越障功能的架空电力线路巡线机器人只能完成两线塔之间电力线路的检查,这类机器人需要人工参与。
文献[12-13]中描述了两机械臂的巡线机器人。图3中展示了该机器人在实地跨越电力线路绝缘子串的过程。当它探测到障碍物时,就停止前进,并用前臂抓紧导线,而其下方的滑块会滑动到前臂的正下方,以减小力矩;然后,后臂抬起离开导线,前臂围绕其所在的轴旋转,使得后臂挂到导线的另一侧上,重复相同的动作,该机器人就完全跨越了这部分的障碍。但是,若该机器人遇到铁塔耐张部分,则很难跨越障碍。
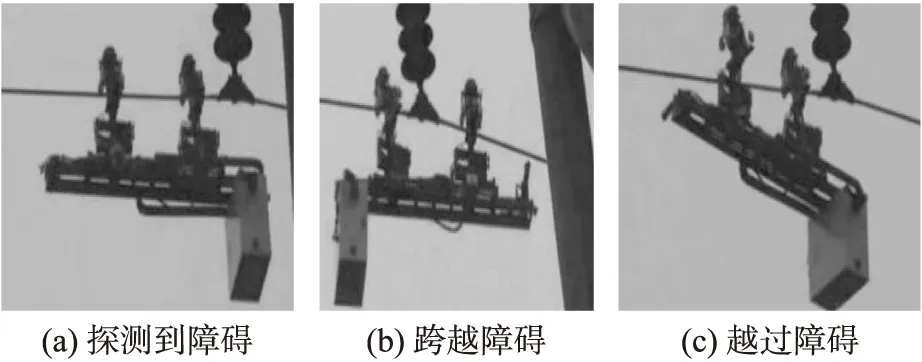
图3 两机械臂机器人越障过程Fig.3 Obstacle crossing process of two manipulator robots
文献[14-15]中设计的巡线机器人不仅能跨越文献[16-17]中的障碍,还能跨越铁塔耐张部分(见图4)。为确保该机器人在巡检期间的稳定性,在其每个关节处都设置了自锁装置。当其探测到前方的障碍时,前臂就会夹紧导线,接着连接两臂的滑轮会相对后臂向下运动,且保持前臂相对静止;然后,前臂抬起离开导线,后臂上与导线连接的滑轮向前滚动直到前臂跨越障碍,之后前臂下落与导线接触并自锁,后臂重复前臂的动作就能越过障碍物。由于该机器人的各个关节转动需要较大扭矩,故需要体积小且能提供较大转矩的电动机。

图4 关节带自锁装置的机器人的越障过程Fig.4 Obstacle crossing process of a robot whose joint has self-locking device
三机械臂的巡线机器人具有更强的越障能力。文献[18]中提出了一种三机械臂机器人,它主要由导轮架、臂架和中心架3部分组成。导轮架能使机器人在导线上移动,当机器人探测到障碍物时,臂架就会抓紧障碍物两端的导线,中心架则会控制导轮架越到障碍物另一端,如图5所示。三机械臂巡检机器人具有更强的越障能力,但其控制复杂。
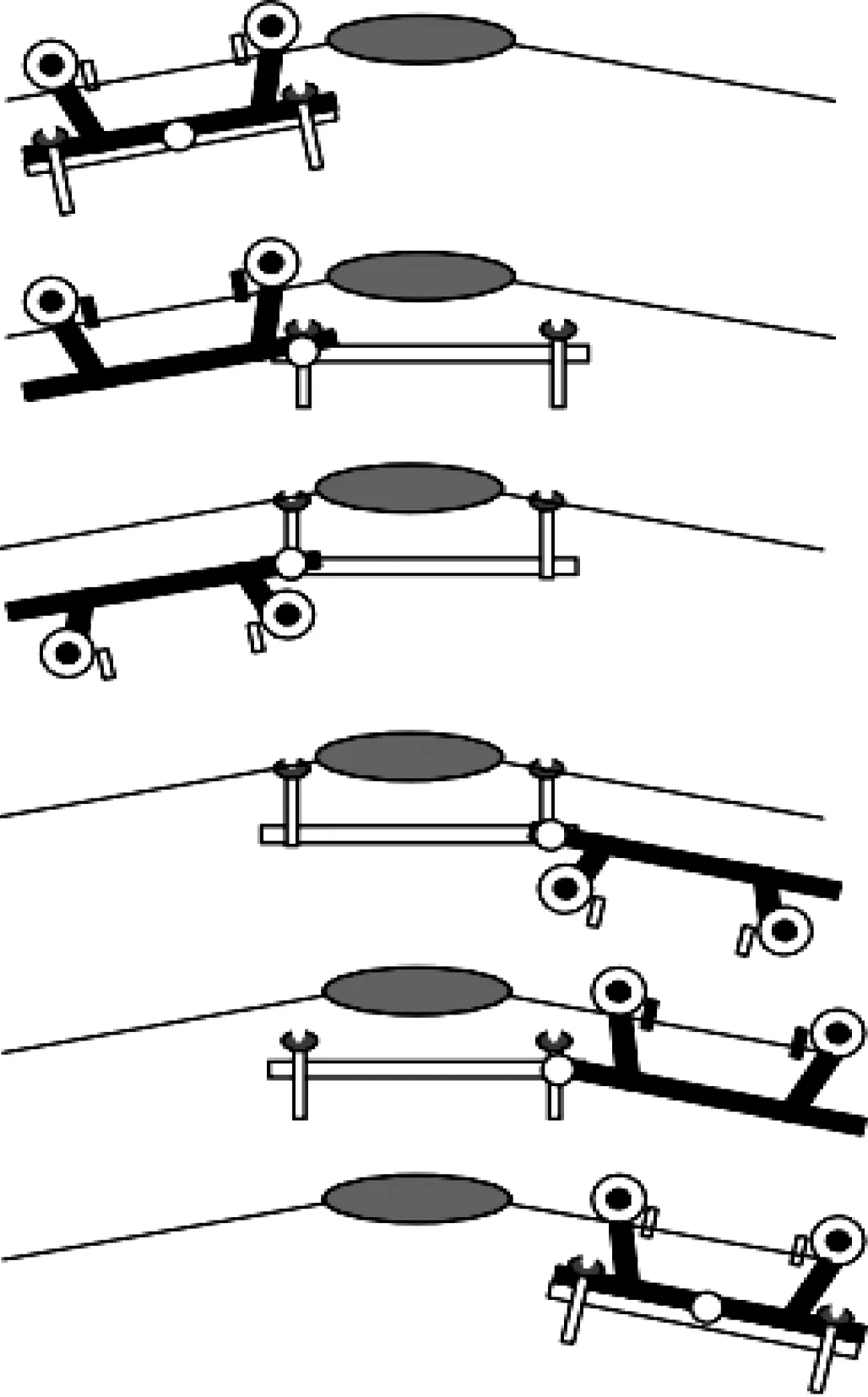
图5 三臂机器人越障过程Fig.5 Obstacle crossing process of a three manipulator robot
综上所述,需要根据不同的线路选取适当的巡检机器人,以达到巡检效果与经济性的平衡。目前的巡线机器人都是针对单分裂导线的巡检,对二分裂、四分裂乃至六分裂导线的巡检还没有专门的设计。
此外,无论是两机械臂还是三机械臂电力线路巡检机器人,它们大部分都是由电池驱动的,故开发自动无线充电系统对于其持久巡检是十分必要的。该类机器人的自动充电系统并不能由电源直接供电,需通过互感器从高压线上获取。文献[16]中提出了一种无线充电技术,利用变压器获取电力线路上的能量,然后通过整流器给电池充电,但由于电池的可靠性较差,故障随时可能发生;对此,文献[17]中提出了一种直接获取电力线路上的能量来驱动机器人的系统,省去了电池装置,但是,若电力线路发生断路,则该机器人将无法工作。
2.1.2 飞行机器人 目前,对飞行式电力线路巡检机器人的研究还很少,现已从应用于军事领域的自主微型直升机的研究中获取了很多关键技术[19]。
英国威尔士大学信息学院于1995年起研制配电线路巡检飞行机器人(Robot of Inspection Power Line, RIPL)。RIPL是在以色列ML Aviati013公司的鬼怪式无人直升机的基础上开发的;该机器人质量为35kg,附加有稳定性控制系统,以增加抗风干扰的能力;安装有高分辨率的彩色CCD摄像机,实现了基于视觉的导航配电线路跟踪及在线检测[20]。西班牙Politécnica de Madrid大学于2000年开发了基于视觉导航的高压电力线路巡线自主直升机(A Vision-Guided Autonomous Helicopter for Inspection of High-Voltage Power Lines, ELEVA),采用三维视觉导航系统引导自主直升机沿着架空电力线飞行,以实现对高压架空电力线路的在线检测[21]。
与沿线爬行机器人的巡检方式相比,上述两种飞行机器人具有环境适应能力好、操作方便、巡检效率高等优点。但是,仍然存在如轨迹规划的智能化水平较低、对安全性考虑不足、控制精度不够等不足。
飞行机器人主要有3种飞行模式,即人工控制、半自动控制和全自动飞行模式。全自动飞行模式通过飞行控制软件设计飞行路线,机器人按照制定好的路线执行飞行任务;适用于自动和快速巡检。在可视范围内,该模式是十分必要的[22]。在全自动飞行模式下,飞行机器人的路径规划是亟待解决的难题。规划路径时,应注意全局路径规划与局部路径规划的不同,以及飞行轨迹平滑时飞行机器人的姿态等[23]。
2.2电缆管道巡检机器人
电缆隧道中容易产生火灾,且隧道的空气中一般存在着放射性污染物。若在现有的隧道内对温度、烟雾、有毒气体及积水等环境信息进行检测,需要建立完整的监控系统网络,投资成本高,效益不明显[24]。管道机器人作为较先进的管道检测设备,显示了其巨大的应用前景[25]。
文献[26]中设计了一款电缆管道检测机器人(见图6)。该机器人能在黑暗、潮湿的地下管道内工作,具有很好的移动性和灵活性,能满足管道探测、疏通和敷设电缆拉线的要求。但在使用中,尚存在因现场碰撞震荡而引起接插件接触不良等现象。

图6 电缆管道检测机器人Fig.6 Cable duct inspection robot
目前,电缆管道巡检机器人行走机构的驱动方式及信号、电力的传输供给方式尚不能完全满足电缆巡检的要求。管道机器人在弯管、支岔管中要顺利通过是一个难点[27];要在机构上保证机器人能够在这些特殊环境中顺利行走,需要寻找融合各种机构优点和可靠性的机构方案。管道巡检机器人面临的环境复杂、恶劣,且管道尺寸各异,很难有一个统一的机器人平台解决所有的问题。
3 机器人在电力系统中其他领域的应用
输变电设备的绝缘子污闪是影响供电安全的主要原因之一,国外主要采用带电水冲洗的方法清扫绝缘子[28]。文献[29]中开发和设计了一款适合兰州变电站使用的绝缘子带电清扫机器人,主要用于清扫220/330kV支撑绝缘瓷瓶。然而,在实际使用中仍存在不少问题。
电力铁塔攀爬机器人是针对铁塔攀爬环境设计的,是检测高压电力铁塔及其附件损伤、缺陷情况的执行机构,也可作为绝缘子清扫设备及巡线机器人的载体,实现对绝缘子串的清扫和输电线路的检测[30]。文献[31]中提出了机器人控制太阳能电池板,可以将太阳能电池板向太阳倾斜,增加了15%的发电量,改变了未来太阳能系统的管理规则;然而,该系统安装复杂,维护费用昂贵。文献[32]中提出了一种检测绝缘子的机器人,该机器人结构简单,质量小,效率高。文献[33]中提出了一种尺蠖型风机叶片巡检机器人。利用连接在风机舱上的绳索,该机器人可以在叶片上上、下移动,检查叶片的状态。此外,文献[34]中的电力铁塔焊接机器人可应用于电力铁塔的焊接。
4 结 语
电力系统的可靠性要求较高,其稳定、可靠运行是关系到社会民生的大计。本文介绍的核电站与变电站巡检机器人、输电系统巡检机器人等电力系统机器人,具有一定的代表性,根据它们的技术实现方法及存在的问题,笔者认为电力系统机器人的发展与研究方向如下。
(1) 电力系统机器人应具有良好的适应性、通用性,并具有高度智能化。在电力系统领域中,机器人不仅作业对象复杂多变,而且经常要面对风、沙、雨和烈日的照射,甚至是高辐射等复杂而恶劣环境,因此,电力机器人必须具有良好的适应性,能根据环境实现自适应调整,自动选择最佳作业内容与作业方法。
(2) 应进一步优化电力系统机器人的机械构件设计。机器人机械结构形式的优劣直接决定了机器人运动的灵活性和可靠性,也决定了机器人控制系统的复杂性。因此,电力系统领域机器人在满足功用和性能的前提下,其机器人的设计应尽可能简单、紧凑和轻巧。
[1] 彭 朔.基于神经网络的核电站检修机器人的智能控制研究[D].保定:华北电力大学,2010:1-5.
[2] 刘青松,张一心,向文元,等.核电站机器人技术应用现状及发展趋势[J].机器人技术与应用,2011(3):12-16.
[3] 刘呈则,严 智,邓景珊,等.核电站应急机器人研究现状与关键技术分析[J].核科学与工程,2013,33(1): 97-105.
[4] 陈巧敏.专家系统在核电站智能机器人中的应用研究[D].保定:华北电力大学,2011:11-21.
[5] 许 松.基于模糊逻辑的核电站检修机器人运动控制研究[D].保定:华北电力大学,2009:5-11.
[6] 毛琛琳,张功望,刘 毅.智能机器人巡检系统在变电站中的应用[J].电网与清洁能源,2009,25(9):30-32,36.
[7] 张 靖.变电站设备巡检移动机器人的研究与设计[D].河北保定:华北电力大学,2010: 10-19.
[8] 李向东.基于移动机器人的变电站设备巡检系统[D].济南:山东大学,2007: 27-40.
[9] 马明山,朱绍文,何克忠,等.室外移动机器人定位技术研究[J].电工技术学报,1998,13(2):43-46.
[10] Guo Rui,Han Lei,Sun Yong,et al.A mobile robot for inspection of substation equipments[C]∥1st International Conference on Applied Robotics for the Power Industry.Montréal,Canada:IEEE,2010: 1-5.
[11] 周风余.110kV输电线路自动巡检机器人系统的研究[D].天津:天津大学,2008: 1-5.
[12] Yang Guodong,Li En,Fan Changchun,et al.Adaptive fuzzy logic based inspection robot for high voltage power transmission line[C]∥IEEE International Conference on Information and Automation.Harbin,China: IEEE,2010: 613-618.
[13] Yang Guodong,Li En,Fan Changchun,et al.Modeling and control of a bi-brachiate inspection robot for power transmission lines[C]∥2010 International Conference on Mechatronics and Automation.Xi’an,China: IEEE,2010: 1036-1041.
[14] Lorimer T,Boje E.A simple robot manipulator able to negotiate power line hardware[C]∥2nd International Conference on Applied Robotics for the Power Industry (CARPI).Zurich,Switzerland: IEEE, 2012: 120-125.
[15] Wang Ludan,Liu Fei,Wang Zhen,et al.Development of a practical power transmission line inspection robot based on a novel line walking mechanism[C]∥2010 IEEE/RSJ International Conference on Intelligent Robots and Systems.Taipei: IEEE,2010: 222-227.
[16] Zhang Dakun,Zhang Xinghai,Jiang Wei.New power system for robots on transmission line[C]∥2010 Asia-Pacific Power and Energy Engineering Conference (APPEEC).Chengdu: IEEE,2010: 1-4.
[17] Caxias J,Silva F A,Sequeira J.Transmission line inspection robots: Design of the power supply system[C]∥1st International Conference Applied Robotics for the Power Industry.Montreal,QC: IEEE,2010: 1-6.
[18] Montambault S,Pouliot N.LineScout technology: Development of an inspection robot capable of clearing obstacles while operating on a live line[C]∥IEEE 11th Internation Conference on Transmiss amp; Distribtion Construction,Operation and Live-Line Maintenance.Albuquerque,NM: IEEE,2006: 1-9.
[19] 张运楚,梁自泽,谭 民.架空线路绝缘子破损视觉检测研究[J].高技术通讯,2005,15(8): 35-38.
[20] Jones D I,Whitworth C C,Earp G K,et al.A laboratory test-bed for an automated power line inspection system[J].Control Engineering Practice,2005,13(7):835-851.
[21] Del-Cerro J,Barrientos A,Campoy P,et al.An autonomous helicopter guided by computer vision for inspection of overhead power cable[C]∥Proceedings of the IEEE/RSJ.[S.L.]: IEEE,2002:69-78.
[22] Wang Binhai,Chen Xiguang,Wang Qian,et al.Power line inspection with a flying robot[C]∥1st International Conference on Applied Robotics for the Power Industry.Montréal,QC: IEEE,2010: 1-6.
[23] 王兴博.架空电力线路巡检飞行机器人路径规划研究[D].北京:华北电力大学,2006: 46-47.
[24] 姜 芸,付 庄.一种小型电缆隧道检测机器人设计[J].华东电力,2009,37(1):95-97.
[25] Kwon Y S,Yi B J.Development of a pipeline inspection robot system with diameter of 40mm to 70mm (Tbot-40)[C]∥2010 International Conference on Mechatronics and Automation.Xi’an: IEEE,2010: 258-263.
[26] 戚 伟.电缆管道机器人视频监测系统的开发[D].上海:上海交通大学,2008: 8-10;82-85.
[27] 甘小明,徐滨士,董世运,等.管道机器人的发展现状[J].机器人技术与应用,2003(6): 5-10.
[28] Pelacchi P.Automatic hot line insulator washing device positioned by helicopter[C]∥1998 IEEE 8th International Conference on Transmission amp; Distribution Construction,Operation amp; Live-Line Maintenance Proceedings.Orlando FL,USA: IEEE,1998: 133-143.
[29] 孔 祚.超高压带电清扫机器人控制系统设计与研究[D].上海:上海交通大学,2008: 7-12.
[30] 刘晓宇,陆小龙,赵世平.电力铁塔攀爬机器人工作空间的3种求解方法[J].机械设计与制造,2012,29(5): 10-14.
[31] 《工业设计》编辑部.机器人太阳能电池板生产更多的电力[J].工业设计,2012(9):47.
[32] Park J Y,Lee J K,Cho B H,et al.An inspection robot for live-line suspension insulator strings in 345-kV power lines[J].IEEE Transactions on Power Delivery,2012,27(2): 632-639.
[33] Lim S,Park C W,Hwang J H,et al.The inchworm type blade inspection robot system[C]∥9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI).Daejeon,Korea:IEEE,2012: 604-607.
[34] 王福方,姚国权,陈 州.电力铁塔焊接机器人可行性研究[J].现代焊接,2012(9): 41-43.
Research Status and Prospect of Robots for Electrical Power Systems
ZHENGPanlonga,CHIDongxiangb
(a.School of Electrics Engineering, b.School of Electrons amp; Information,Shanghai Dianji University, Shanghai 200240, China)
Typical applications of robot in electrical power systems including nuclear power plants robot, substation inspection robot, overhead line inspection robot, cable ducts robot, etc.are studied.Implementations of various robots used in power systems are introduced.The future development trend is discussed.
robot; electrical power system; intelligent; inspection
2095-0020(2013)06 -0347-06
TP 242;TM 7
A
2013-07-24
上海市教育委员会科研创新项目资助(11YZ270)
郑盼龙(1989-),男,硕士生,主要研究方向为电力系统机器人及其无线充电系统,
E-mail:nick1881822@hotmail.com
指导教师:迟冬祥(1971-),男,博士,副教授,主要研究方向为信号与信息处理、嵌入式系统,
E-mail: chidongxiang@aliyun.com
