红外避障系统的设计
2013-11-07杨黎,余胜
杨 黎,余 胜
(湖南人文科技学院物理与信息工程系,湖南娄底417000)
机器人在行进过程中遇到障碍物时,首先能够检测到障碍物,同时需要对障碍物是否妨碍行动进行进一步判断,最后达到避开障碍物的目的。而机器人的视觉传感器就具有识别障碍物的功能,同时它也作为自动行走和驾驶的重要部件。它的典型应用领域是自主式智能导航系统,但其需要通过大量的运算,且只能识别一些结构化环境简单的目标[1]。因此,设计一个简单实用,且能够快速识别障碍物的避障系统是非常有必要和有现实意义的。
本设计最重要的特点是红外发射部分不设专门的发射电路,而是直接从接收部分检测。既简化了线路与调试工作,又防止了周围环境和元件参数变化对收发频率造成的差异,使电路的稳定性和抗干扰能力大大加强。
一 基本参数研究和方式
(一)红外光检测方式
红外线是波长介于微波与可见光之间的电磁波,波长在770nm至1mm之间,是波长比红光长的非可见光。本设计通过红外发光二极管发射一束调制在特定频率上的红外光线,在遇到障碍物的时候反射回来,同时被红外接收二极管捕捉到,再送到特定的电路进行相应处理。
(二)中心频率
中心频率就是滤波器通频带中间的频率,以中心频率为准,高于中心频率一直到频率电压衰减到0.707倍时为上边频,相反为下边频,上边频和下边频之间为通频带。
本设计的中心频率可以手动自由调节,因此可以实现多个红外传感器的共同工作,而彼此互不干扰,达到多点检测,以便更好的掌握周围环境,为避障提供准确的信息。
二 主要器件分析
(一)红外反射式传感器
1.传感器比较
能实现视觉功能的传感器主要有以下几种[2]:
(1)利用CCD摄像头进行图像采集和识别,但不适用小体积系统的使用,并且涉及图像采集与识别等领域。
(2)电容式接近传感器,基于检测对象表面靠近传感元件时的电容变化。
(3)超声波传感器,通过发射一束超声波,在遇到障碍物时反射回来后,根据超声波的速度与时间差来计算与障碍物的距离。
(4)红外反射式光电传感器,它包括有固态发光二极管与的固态光敏二极管或光敏三极管。
根据情况,红外反射式传感器与精确的测距系统不同,它只要感知物体的有无以及接近的程度,并且判断出简单的阈值及提供远近分档的距离。因此,使用较简单的接近传感器来实现避障功能是可行的。
2.特性及工作原理
反射式光电传感器的光源有多种,包括红外发光二极管,普通发光二极管,激光二极管等。前两种易受到外界光源的干扰,而第三种光的频率相对比较集中,只接收很窄的频率范围信号,抗干扰能力强但造价比较高。
在理想的情况下,光电传感器需要处于发射的红外线经障碍物发射回来能被接收二极管接收到的区域,才能检测到周围的物体。同时,光的检测受到来自颜色,形状,光洁度及日光等不同因素的反射面的影响。因此,用发射与接收二极管,将受到外界干扰,不利于测量结果,但利用反射光强的测量方法可以提高测量的准确性和可靠性[3]。它的原理是红外发射管发射经过调制的信号,然后由红外接收管接收。X表示红外传感器与被测障碍物之间的距离,如图1所示。
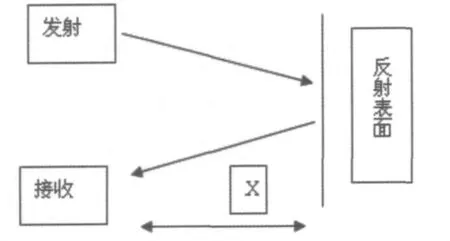
图1 红外发射与接收原理
(二)LM567锁相环解码器
LM567是美国国家半导体公司产品,同类产品还有美国西格莱蒂克斯公司的NE567,新日本无线电公司的NJM567等。这种解码器具有高噪声抑制,窄通频带,不受假信号干扰,稳定的中心频率和通带中心频率可调等特点。因此在音频亚音频单音频解码中得到广泛应用[4]。
1.内部结构
LM567内部包含了两个鉴相器、放大器、电压控制振荡器 VCO等单元,它的引脚图如图2[5]。LM567的管脚功能是:1脚为输出滤波,2脚为回路滤波,3脚为输入端,4脚为正电源端(电压值需最小为4.75V,最大为9V),5脚为定时电阻端,6脚为定时电容端,7脚为接地端,8脚为输出端。
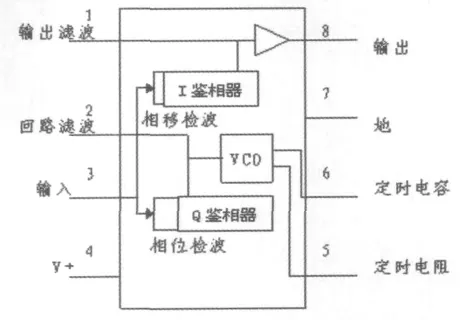
图2 LM567引脚图
锁相环内包含电流控制振荡器(CC0)、反馈滤波器和鉴相器。解码块由锁相环和晶体管组成,若在输入端加入一特定的音频时,则可以输出一个方波信号。处于通带内的输入信号可以提供一个类似饱和晶体管的对地开关,由I和Q检波器组成其电路,其译码器的中心频率通过内部电压控制振荡器驱动的振荡器决定,中心频率的输出和带宽延迟由外接的独立元件设定。
2.工作原理
当音频译码器LM567工作时,锁相环内部电流控制振荡器产生一定频率和相位的振荡信号,此振荡信号与3脚的输入信号,通过内部的正交相位探测器相比较。如果输入信号的频率在设定的通频带范围内,则输入信号被锁相环锁定。此时,芯片的内部晶体管导通,输出一个低电平信号。
LM567通过5脚输出的矩形信号和2脚输出的锯齿波脉冲,都与内部的振荡信号的频率一致。锁相环相位检测器输出的经过F/V变换的电压信号,通过2脚输出。5脚受2脚输入的音频信号的影响,输出一个经调制的方波信号,作为振荡信号。
四 系统设计
(一)总体设计框图
本方案主要由红外发射与接收电路,信号放大处理电路,及单片机外围电路,包括晶振电路、复位电路和报警电路的设计。由红外发射电路产生一个调制在38K频率载波上的红外信号,经障碍物反射回来后,被红外接收电路接收,并经过信号放大处理,产生数字信号,送给单片机处理,由单片机产生控制信号驱动报警器。原理框图如图3所示。

图3 系统原理框图
(二)红外发射与接收电路
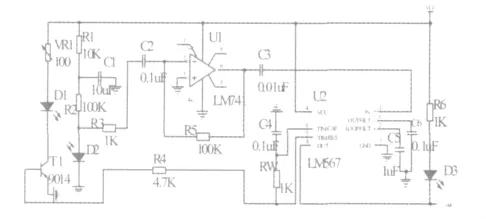
图4 红外发射与接收电路图
如图4所示,D1发射红外线,D2接收红外信号。LM567第⑤、⑥脚为译码中心频率设定端,一般通过调整其外接可变电阻W改变捕捉的中心频率。图中红外载波信号来自LM567的第5脚,即载波信号与捕捉中心频率一致,能够极大的提高抗干扰特性。当接收到的红外载波信号和捕捉中心频率一致时,说明不是干扰,LM567的第⑧脚输出低电平。LM567⑤、⑥所接的RW和电容决定了内部压控振荡器的中心频率f,f=1/(1.1RC)。第⑤脚产生的方波振荡信号经T1放大后驱动红外发光二极管D1发射红外脉冲,红外脉冲照射到D2后,使两端产生一个同频的电压脉冲。该脉冲通过C2被送到运放741的②脚,经放大后从⑥脚输出,使之形成于中心频率波形相同的方波,经C3输入到LM567第⑧脚。由于振荡和锁相接收为同一振动源,发射频率与中心频率相同,且当第③脚输入幅度大于25mv,频率在其带宽内的信号时,第⑧脚输出低电平,同时使D3发光。
本电路的最大持点是红外线发射部分不设专门的信号发生电路,而是直接从接收部分的检测电路U2的5脚引入信号,此信号是锁相音频译码器的锁相中心频率,这样既简化了线路和调试工作,又防止了周围环境变化和元件参数变化对收发频率造成的差异,实现了红外线发射与接收工作频率的同步自动跟踪,使电路的稳定性和抗干扰能力大大加强。
本电路可多个用于同一设备而不会相互干扰,因为不同RW或C4的值U2译码器的中心频率不同,但中心频率不能大于500KHz。调整VR可改变探测距离,注意探测距离要受反射面颜色的影响,这是红外线的特性决定,寻迹机器人用了此特性。
(三)软件设计
首先对单片机进行初始化,然后设置定时器T0初始值,启动定时器。由于红外发射与接收电路是独立于单片机的,它不需要单片机给予驱动信号,只需在检测到障碍物时,给单片机提供一个低电平信号即可。在单片机运行时,利用定时器每隔一段时间就去定时检测输入进来的信号。当检测到低电平时,驱动蜂鸣器以及其他的报警装置,也可驱动机器人的电机等。
主程序开始设置定时器0,首先设置定时初值。因为是每隔500ms进行一次中断,故可以先设置 TH0和 TL0为 50 000,然后再定义一个变量[6]。
设置完初值后,需对工作方式控制寄存器TMOD进行设置。令TMOD=0x01,则让定时器0工作在工作方式1,即16位的定时器。然后开总中断即EA=1,开定时器0中断即ET0=1,最后令TR0=1启动定时器。这样经过这些设置,定时器0 就开始工作了[7]。
由于单片机的晶振是12MHz,那么一个机器周期就是1us。单片机每隔一个机器周期就进行自加一次,根据设置的初值,当正好记满50 000个机器周期时,即50ms时进行一次中断。然后通过变量值,每隔一次中断进行一次自加。当加到10时就对输入信号进行检测,同时对变量进行清零,准备下一次检测。对于检测到的低电平进行判断,确定为低电平时驱动蜂鸣器报警。
五 实验及结果分析
(一)仿真实现
本仿真实验采用Proteus仿真软件来实现,由于Proteus仿真软件中没有LM567这款芯片,故软件仿真主要针对信号放大这块,如图5所示。
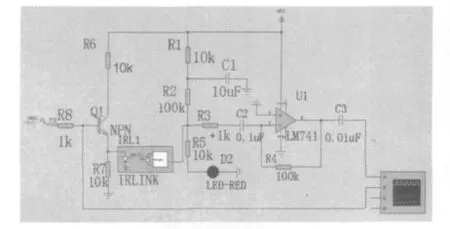
图5 放大电路仿真图
用1kHz时钟信号代替LM567来驱动光耦器件,光耦器件将光信号转为电信号后经过运放741的放大,将输出的信号与输入信号的频率进行比较。通过示波器观察两者的频率大小,如图6所示。从示波器上可以看到,在输入信号为1kHz的方波信号时,通过放大的信号为窄脉冲信号,且两者的频率相同。
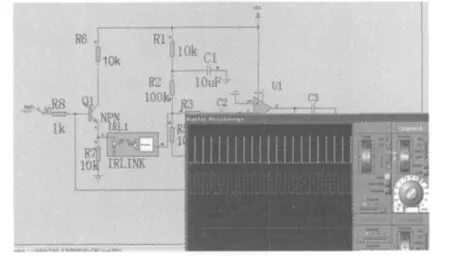
图6 仿真1
由于 LM567的频率有一个从100Hz到500KHz的频率变化范围,故在仿真中通过改变时钟信号的频率来观察741输出的波形变化。如当输入信号频率为10kHz时,输出的信号如图7所示。通过调节示波器,可以清楚的看到输入与输出波形的频率比较。当加大输入信号的频率时,会发现其输出信号的幅度出现了一定的失真,但其频率会保持不变。
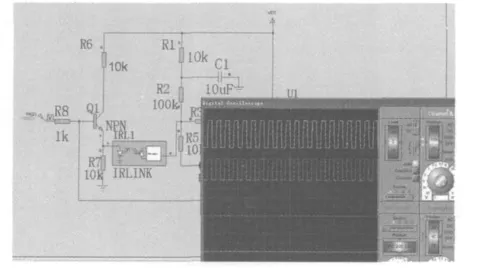
图7 仿真2
(二)硬件电路
硬件仿真主要对红外发射与接收电路模块进行测试,通过改变特定的参数来研究对整个电路性能的影响。在整个的测试中考虑的因素有红外对管的夹角值大小,改变红外发射强度的VR电阻值和用来改变中心频率的RW电阻值。另外,还要考虑不同颜色的物体对红外光的反射强度大小的影响。
硬件电路图如图8所示,透明二极管为红外发光二极管,黑色为红外接收二极管,在红外对管前面有一个障碍物。当红外对管慢慢靠近障碍物时,红色发光二极管被点亮。其原理是红外发光二极管发射的红外光,遇到障碍物反射回来后,被红外接收二极管接收,经过741运放将信号放大。被放大的信号又送回LM567与内部的中心频率进行比较,当频率相同时输出低电平,同时点亮二极管。这样基本的避障功能在不需要借用单片机的资源的情况下就可以实现了。
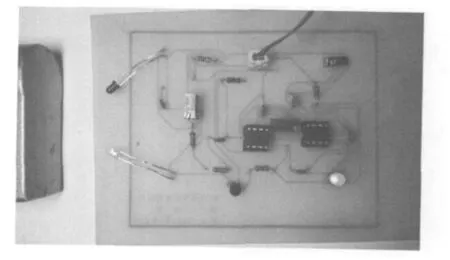
图8 硬件电路
此外,电路还有一些基本问题需要探讨。首先是红外对管的夹角,当两管夹角θ=00时,基本检测不到反射回的红外光。当00<θ<1800时,根据理论知识,随着夹角的增大,更加容易检测到障碍物反射回的红外光。当θ=1800时,只要中间没有障碍物基本可以检测到红外光。实际的效果也如理论推导的一样,符合反射原理。
但是,随着夹角的增大,两管的相交距离也越来越短,即检测到障碍物的距离变短。夹角小时,可以检测到更远的障碍物,但是反射回的红外光强度变弱,不易被红外接收管检测到。夹角大时,反射回的红外光强度增强,但检测的距离变小,容易缩短机器的反应时间,以至于不能及时的躲避障碍物。因此,选择合适的夹角距离是比较重要的一步。夹角小时,反射回的红外光减弱,可以通过VR电阻值来改变。随着VR的减小,电流增大,发射管的电压增大,发射的红外光强度增强,则更容易检测到障碍物反射回的红外光。每当改变VR电阻值时,就会发现红外光感知的距离会发生一些变化。由于时间的原因再加上实验条件的约束,没有对此做进一步探讨。
总结
本设计利用红外发射与接收二极管实现对障碍物的信息的采集,发光二极管发射的红外线遇到障碍物反射回来后,被红外接收二极管检测到。并利用运放对采集到的信息进行放大,此微弱的信号经过741运放的放大后,送到LM567音频解码器进行处理。LM567在此设计中即担任振荡器,又作选频接收,将被放大的信号与内部振荡器频率进行比较,频率相同则输出一个低电平信号,这样就实现了对障碍物的检测。
利用LM567作为频率比较,能够提高系统的抗干扰能力,且周围电路简单易于实现。在需要多个传感器的时候可以通过改变其旁接的电容值,其操作简单。这样单片机就只需要检测各个传感器其输出的是否为低电平信号,降低了占有单片机资源的比例,让单片机去执行更加重要的任务。
[1]雷鹏飞,沈华东,高坎贷,等.红外传感器在智能车避障系统的应用[J].电脑与信息技术,2010,18(4):5-6.
[2]吴建平,殷战国,曹思榕,等.反射式传感器在自主寻迹小车导航中的应用[J].中国测试技术,2004,30(6):22-23.
[3]陈杰,黄鸿.传感器与检测技术[M].北京:高等教育出版社,2002:132.
[4]孟敬俠.锁相环解码器LM567及应用[J].中国学术杂志,2010(4):38-39.
[5]雷建龙.LM567及其在超声波检测中的应用[J].电子技术,2004(4):56-57.
[6]彭伟.单片机C语言程序设计实训100例[M].北京:电子工业出版社,2009:57.
[7]Stephen G Kochan.Programming in ANSI C[M].Hagden Books Indianapolis:Indiana,U.S.A,1994.
