激光枪自动射击报靶装置
2013-11-05陈启昂潘瑶麟楼奇力
陈启昂 潘瑶麟 楼奇力
(中国计量学院现代科技学院 310018)
1 系统方案
1.1 主控芯片的选择
根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案:
方案一:MSP430系列单片机。16位低功耗单片机,性能良好。
方案二:51系列单片机。价格便宜,应用广泛,但是有复杂的算法的局限。
方案三:MK60DX256ZVLQ10单片机。32位处理器内核高性能处理器,具有强大的控制、处理能力,丰富的外围模块,稳定的系统,提供方便高效的开发环境。
本系统选取MK60DX256ZVLQ10单片机作为控制器,MK60DX256ZVLQ10单片机支持低功耗模式,性能稳定,内置嵌套向量中断控制器,在控制、处理数据速度上有优势,并含有丰富的外围模块,所以选择方案三。
1.2 传感器的选择
本系统的传感器主要是图像的采集及分析,可考虑的传感器如下列方案:
方案一:CCD图像传感器。CCD是一种半导体器件,能把光学影像转化为数字信号。
方案二:摄像头。数字摄像头可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将其储存在计算机里。
由于题目明确要求使用摄像头,识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息。因此传感器选择方案二。
1.3 电机的选择
电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:
方案一:步进电机。在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。每给一次脉冲信号,电机能够转过一个步距角。
方案二:直流减速电机。此电机在正常通电状态下,转速平稳,角度的变化也近乎连续,控制简单方便。
方案三:舵机。此电机由PWM的占空比来控制转动角度。角度准确,控制简单。
根据设计的要求可知,步进电机存在的明显缺陷是角度变化的局限性,控制相对直流减速电机而言也复杂。直流减速电机角度连续变化,转速平稳,容易控制,但是舵机集各个优点于一体,因而选用第三种方案。
1.4 总方案的确定
综上,本系统最终以MK60DX256ZVLQ10作为控制器,根据摄像头采集的图像来判断弹着点所在位置,并显示于12864液晶屏,同时能通过键盘来改变PWM波使舵机转动相应角度,从而调控激光枪的弹着点。
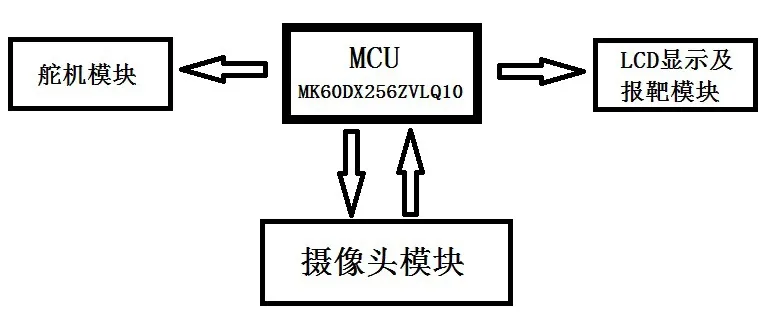
图1 总方案图
2 理论分析与计算
2.1 激光枪自动控制原理分析、计算
激光枪的自动控制由两个舵机来完成,两个舵机分别控制上下移动和左右移动。舵机的转动角度由PWM波的占空比来控制。
给定PWM波的周期为20ms, 初始化脉宽为1.5ms,即每旋转一度,所需增加的脉宽为:

其中,Tmax为左转极限脉宽。
Tmin 为右转极限脉宽。

图2 舵机控制原理图
2.2 弹着点检测原理分析、计算
根据题目中的要求,胸环靶是在不反光的白纸画有一组相距5cm的同心圆(线宽不超过1mm),最内圆环直径10cm,圆环内为10环区域,从最内环至最外环间分别为9、8、7、6、5环区域,最外环外为脱靶,具体如下:
以圆心为原点,我们采用极坐标的方式来处理,因为胸环靶的位置不改变,通过舵机转动的角度来改变弹着点在胸环靶上的坐标。所以弹着点的位置可以根据舵机转动的角度及舵机与胸环靶之间的距离来计算。
根据以上分析,可以将弹着点的位置问题转化为求解水平角度或仰角与水平角度的相关问题。降低了任务的复杂性,目标明确。
根据对胸环靶的分析,依据简易、精确控制与节约资源的原则,本设计采用摄像头置前,与靶心的垂距为90cm。
激光枪的打靶射击可分解为水平移动和竖直移动。摄像头应用于确定弹着点的位置,反馈予控制器,在液晶屏上数字报靶。考虑到能够快速的检测到弹着点的具体方位,以便快速瞄靶心。设激光枪控制弹着点与靶心的距离为x,则
水平方向激光束与中垂线的夹角
计算如下:
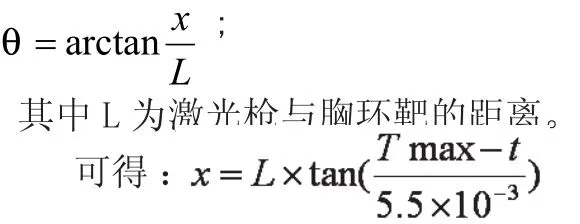
其中t为当前所给的PWM波脉宽。
竖直方向的布局分析与上述情况相同。
此外,考虑到外界的影响,在胸环靶的靶环外贴上正方的黑色胶带做标记。实践证明,这样的处理能够达到更良好的控制。
3 电路与程序设计
3.1 电路设计
本系统的电源模块有两种,如图2所示,上半部分电路是给摄像头提供5V电压的电源模块,下半部分电路是给Kinetis60提供3.3V电压的电源模块。

图4 电源模块
为了能更清楚地知道激光点当前所在环数,我们加入了语音播报模块,本模块由ISD1700芯片及其外围电路组成,可以对语音进行存储与回放,同时具有音量调节,声音擦除等功能。

图5 语音存储与回放电路
3.2 程序设计
程序描述:
初始化部分:控制器配置
程序主体部分包括:激光枪及瞄准机构、胸环靶、弹着点检测电路。
控制系统上电后,进入初始化状态,12864液晶显示胸环靶的相应图像,在按键之后,系统进入按键控制弹着点的位置,此时,摄像头采集图像,并且液晶显示数字报靶。再次按键,移动激光笔自动追踪靶心,经过一段后,系统会自动调节使得激光笔的弹着点位置与靶心的位置相对并打靶击中圆心。

图3 摄像头与激光枪分布图
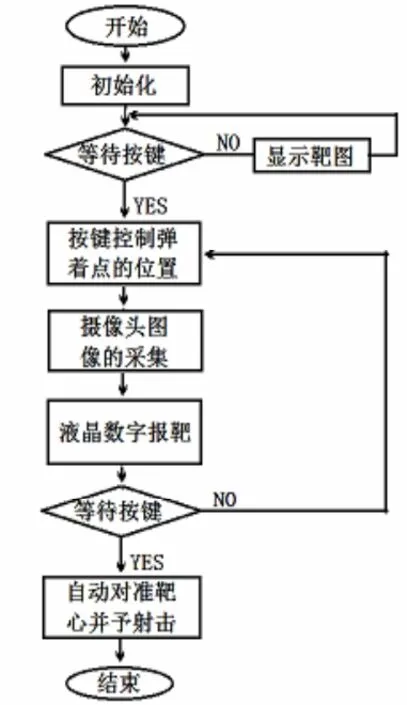
图6 程序流程图
4 测试方案与结果
4.1 测试方法与过程
由理论分析可知,本系统对摄像头的图像采集、处理,要求比较高。主要就是如何调制摄像头,使其采集到的图片尽量不发生畸变。
测试前的准备:
先给点光源通电,调整点光源的电流值,达到规定范围内,然后在给其余设备供电后系统直接进入检测传感器是否能够正常工作状态。然后,手动使激光笔打靶,查看摄像头的图像采集情况,主要是使水平方向的图像,竖直方向的图像尽量少发生畸变,并且微调指示台,传感器的采样图像有显著地变化,接着按启动按键,就可以测试。
测试方法:在测试前的准备 工作结束后,先让其任意打靶,液晶数字报靶,键盘任意调整弹着点位置,激光束光斑从胸环靶上的指定位置迅速瞄准并击中靶心。
4.2 测试仪器和材料
稳压电源 数字万用表 胸环靶支架
4.3 测试结果与数据
胸环靶位置不变,任意给激光笔的指示位置,打靶,液晶数字报靶,测量数据如下表:

表1 胸环靶位置不变的测量数据
激光束光斑从胸环靶上的指定位置迅速瞄准并击中靶心,测量数据如下表:

表2 迅速瞄准并击中靶心的测量数据
任意给环数,激光笔打到相应位置,测量数据如下表:

表3 任意给环数,激光笔打到相应位置的测量数据
经过反复调试,胸环靶位置不变,任意给激光笔的指示位置,打靶,液晶数字报靶基本准确,此外,经测试,本系统的拓展部分:在15S之内,激光束光斑从胸环靶上的指定位置迅速瞄准并击中靶心。其他:任意给环数,激光笔打到相应位置,相当精确,并且能够语音报靶。
[1] 刘建,秦会斌,黄博志等.激光打靶系统的设计[J].传感技术学报,2003年04期
[2] 顾敏芬,梁忠诚,朱云等.基于激光打靶机的红外光斑测量[J].光电子技术与信息,2000年04期
