二维激光扫描演示实验系统设计
2013-11-05吴成罗云
吴成 罗云
(湖北工程学院物理与电子信息工程学院,孝感湖北 432000)
随着激光技术的大力发展,激光扫描技术已经广泛地应用到激光打标、条码扫描、激光雕刻、激光加工等领域,然而这些领域的应用均需要相应的扫描系统作为硬件支撑。相比于其它激光扫描器,激光振镜扫描式系统因具有高精度、高速度等特点而广泛用于激光加工行业。基于上述分析,考虑实验室现状,采用扩束镜、聚焦镜、物镜、XY扫描反射镜及其驱动部件和下位机控制器等硬件设计了二维激光扫描演示实验系统,并设计了上位机用户界面,进行了相关的测试实验。
1 二维激光扫描演示实验系统硬件设计
二维激光扫描演示实验系统如图1所示,整个系统由激光器、扩束镜、聚焦镜、物镜、XY轴扫描反射镜及其驱动部件、下位机控制器和PC机上控制界面组成。激光器发射的激光束经过扩束镜之后,得到均匀的平行光束,然后通过聚焦系统的聚焦以及物镜组的光学放大后依次投射到X轴和Y轴振镜上,最后经过两个振镜,二次反射到工作台面上,形成扫描平面上的扫描点。
在工作中,用户可根据自身需要在嵌入式控制界面中输入文字或者一定形状的图形,控制界面根本实际需要将输入转换为下位机控制器所能识别并能执行的运动直线段,并通过异步串口发送至下位机控制器。下位机控制器可以通过驱动器控制XY轴步进电机,同时也能控制器激光器的开启和关闭,以实现跳点或对刀时激光器的控制。
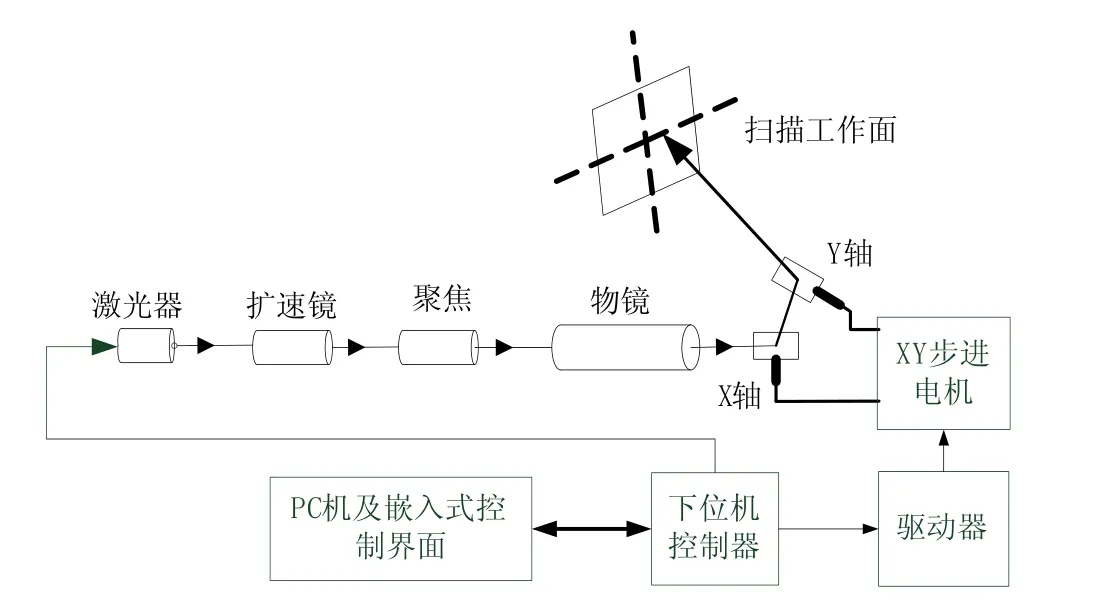
图1 二维激光扫描演示实验系统示意图
1.1 激光扩束方法选择
由于激光束具有一定发散角,为了得到合适的聚焦光斑以及扫描一定大小的工作面,通常在选择合适的透镜焦距的同时,需要将激光束进行扩束。此外,激光经过扩束后,激光光斑被扩大,从而减少了激光束传输过程中的光学器件表面激光束的功率密度,减小了激光束通过时光学组件的热应力,有利于保护光路上的光学组件。扩束后的激光束其发散角被压缩,减小了激光的衍射,从而能够获得较小的聚焦光斑。
考虑到实际因素,本系统采用开普勒法扩束法[8],其原理如图2所示,它由一个负透镜和一个正透镜组成,先经前面的负透镜聚焦后,再经一个正透镜准直为平行光。负透镜又对正透镜的像差进行补偿,它们具有相同的虚焦点

图2 开普勒扩束法
1.2 系统精度分析
设计中要求扫描视场的范围达到210mm×350mm,采用XY振镜扫描系统,设X振镜和Y振镜之间的距离 30emm= ,工作距离 525dmm= 。系统要求控制误差≤±0.01mm,则取系统最小精度为0.002mm。
如果电机选用一般的步进电机,其步距角为0.9°,细分驱动采用512最大细分,而传动比选用180:1,则步进电机最小步距为 :(0.9 × 2π)/360/180/512 = 0.17urad
可见0.17urad<< 3 .6036urad,因此,仅仅选用普通步进电机即可满足系统精度要求。
1.3 步进电机及其驱动器接口
通过上述分析,系统选用一般的两相混合式步进电机作为执行电机,同时选用DMD402A作为电机驱动器,步进电机、驱动器及控制器间的接口示意图如图3所示,驱动器的输入信号为:公共端、脉冲信号、方向信号和脱机信号。采用共阳极接线方式,控制信号低电平有效,当输入脉冲的下降沿到来时,驱动电机运行一步(为确保电机的可靠响应,脉冲低电平持续时间应不小于10μs);方向信号端子接收控制器输出的高/低电平信号,分别代表电机的两个旋转转向;脱机信号端子接收控制机输出的高/低电平信号,低电平时电机相电流被切断,转子处于脱机状态(自由状态),高电平或悬空时,转子处于锁定状态。驱动器的输出信号为四个电机驱动信号A+、A-、B+、B-,用来驱动两相混合式步进电机,将这个四路信号分别连接到步进电机相应的输入端即可。
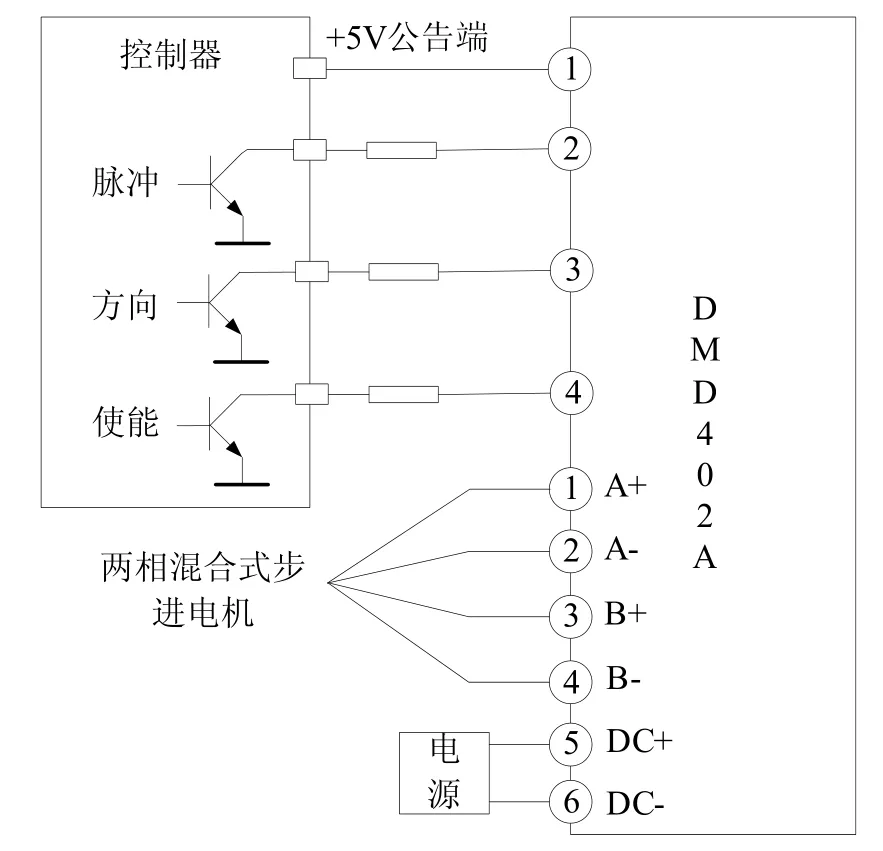
图3 步进电机、驱动器及控制器间的接口示意图
2 系统软件设计
2.1 系统执行线段的插补实现
二维振镜激光扫描系统使用伺服电机控制X轴与y轴振镜的运动,输入数据宽度均为16位。也就是说,对于扫描平面上的X轴与Y轴坐标,分辨率为1/65536。三维振镜激光扫描系统扫描场最大为210mm x 350mm(扫描场高度为525mm时),因此可以对整个扫描场进行坐标化。
对于X轴,210/65536=3.21um,
对于Y轴,350/65536=5.34um
对扫描场进行坐标化,设扫描精度为0.1um(完全可以满足XY所需的插补精度),即X轴或Y轴振镜转动的最小偏角为0.1um×10E-3/525mm=0.19urad,普通步进电机也可以满足该精度要求。
插补算法中最为常用的为直线插补,如图9所示,设插补从O点开始,插补终点,单个插补周期插补距离为ΔL,在X轴的位移为ΔX,在Y轴的位移为ΔY,则可得
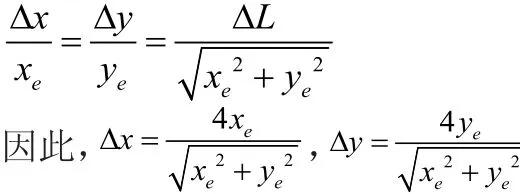
因此,第i+1点的插补公式为:
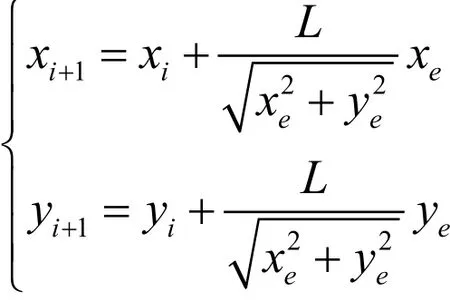
圆弧插补是多个直线段插补,原理类似。
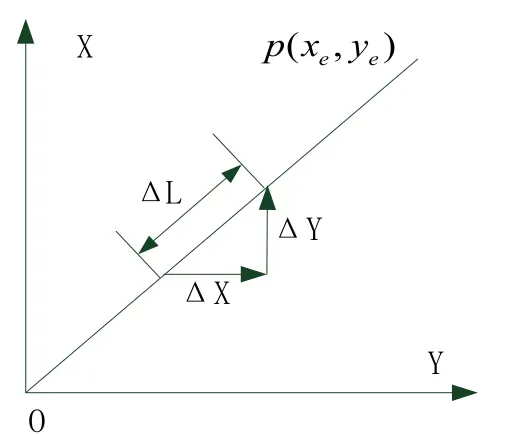
图4 直线插补算法
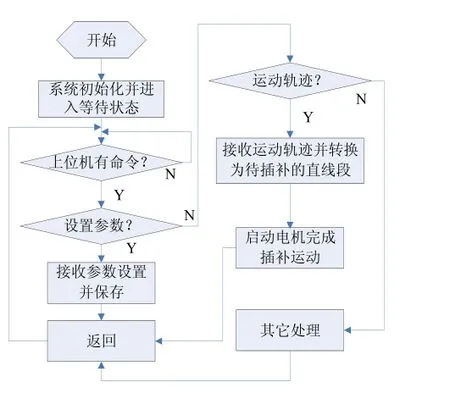
图5 下位机控制器程序流程图
2.2 下位机控制器程序流程
下位机控制器程序流程如图5所示,首先系统上电初始化,之后下位机控制器进入命令等待状态,等待上位机PC用户界面的相关命令。如果有命令即刻进行判断,如果是参数设置,则接收设置参数;如果是运动轨迹,则将轨迹转换为可插补的线段,之后启动电机完成插补运动;如果是其它事项,则进入相应的处理程序。之后返回至等待状态,等待上位机下一次命令。
3 实验及结论
PC上位机软件采用Java语言设计,并对设计的二维激分别进行光扫描系统进行联合测试,分别进行直线段绘制、螺旋矩形扫描。最后进行了普通汉字的扫描测试,分别在用户界面在输入“湖北工程学院”,在下位机的控制下,激光笔依次在绘制板上绘下相应的文字。较好的完成了控制功能。
以下位机控制器、普通步进电机及其驱动、准直镜、扩束镜和聚焦镜设计并制作了二维激光扫描演示实验系统,经过反复测试,系统工作较为稳定,达到了设计要求。
[1] 彭雪峰. 二维振镜式扫描系统及其在SLS中的应用[D].武汉:华中科技大学, 2005
[2] 胡浩. 振镜扫描式激光焊接系统的研究[D]. 武汉:华中科技大学, 2011
[3] 文世峰. 选择性激光烧结快速成形中振镜扫描与控制系统的研究[D]. 武汉:华中科技大学, 2010
[4] 汪会清, 史玉升, 黄树槐. 三维振镜激光扫描系统的控制算法及其应用[J].华中科技大学学报, 2003,31(5):70-71
[5] 李小林, 朱力群, 黄因慧.快速成形中的振镜扫描系统.电加工, 1998, 3:36-37
[6] 王瑞敏, 卢秉恒. 用于激光扫描的几种动态聚焦系统分析[J].应用激光, 1998, 18(1):10-12
[7] 师文庆. 振镜扫描式激光点焊技术中扫描路径的优化[J].应用激光, 2008, 28(4):332-335
[8] 李建新. 激光准直扩束设计和仿真[J].装备制造技术,2009, 3:28-30
