基于地面移动通信基站的差分气压测高方法
2013-11-05杜晓辉张丽荣
杜晓辉 裴 军 张丽荣 刘 成
(中国科学院国家天文台,北京100012)
全球导航卫星系统(GNSS,Global Navigation Satellite System)发展至今,因其有全球性覆盖、全天候工作、能连续运行和高精度定位等特点,已经广泛应用于陆地、海洋、天空的各类军事及民用领域中[1-2].但目前的卫星导航技术还有一定的局限性,例如抗干扰能力差,易受环境等因素的影响,高程定位精度低于水平定位精度等,从而限制了它更广泛的应用.
文献[3]介绍了一种气压高度计和 GPS(Global Positioning System)相结合的方法来提高受环境因素制约的GPS定位系统定位精度的方法.但其精度的提高受制于参考气压点与测点间的距离远近的选择.文献[4]提出以气压高度计作为一颗虚拟卫星,提供虚拟伪距,结合用户的可见卫星和测得的伪距来计算位置坐标的办法,解决了现有的气压高度计辅助卫星定位算法计算繁琐或者难于分析定位精度等问题.但其并未就如何由气压高度计获得本地高程值做出定量的说明.文献[5-7]介绍了把气压测高方法作为虚拟星座应用于基于通信卫星的中国区域定位系统的理念和方法,用以补充和改善三维定位的可用性.但是该方法需要通过气象局实时收集各气象站点的气压和温度值并把其折算成海平面等效气压值和温度值然后编入导航电文,通过卫星广播发送给用户接收机.文献[8-9]介绍了基于中国区域定位系统的高度辅助算法,把由气压高度计所测得的大地高度作为一颗伪卫星参与导航解算.
但上述文献未就如何连续不间断地获得本地高程值做出详细的分析和论述,而且测高精度也受到一定的局限.本文提出利用已发展完备的地面移动通信基站作为气压差分测量基准点的方法,在移动通信基站里安装气压测量传感器,并利用基站传输链路把相关的测量数据传送给用户,用户接收机便可以用移动通信基站的高程值、气压值、温度值,以及用户接收机测点的气压值和温度值,以及利用高程值与气压值之间的对应关系,得到用户接收机处相对于移动通信基站气压测量点的高程值.因为移动通信基站气压测量点的高程值可以预先精确测得,所以便可以获得用户接收机精确的绝对高程,从而能提高GNSS定位系统中的高程定位精度.
1 气压测高的基本原理
气压测定高程的基本原理是指在重力场内的大气压力随高度增加而减小的原理.通过使用气压传感器来测量气象参数的变化,计算得到高程的相应变化[7,10].
在空气处于静止状态时,空气块在水平方向上各面所受到的压力相互抵消,在垂直方向上所受到的向上的力与重力平衡,由此得到大气静力学方程

式中,P为大气压强;ρ为空气密度;Z为高度;g为重力加速度.
空气状态方程可写为

式中,T是空气的热力学温度,Rd=287.05 J·kg-1·K-1是干空气的气体常数.将式(2)代入式(1),高度由h0积分到h,就得到气压与高度的关系式

式中,P为用户所测的大气压;P0为参考点大气压;h0为参考点高度;h为用户设备高度.
重力加速度g随高度变化非常缓慢,常作常数处理.所以上式可化为

由于大气温度随高度的分布很复杂,难以用函数关系表示,因此对式(4)直接求积分几乎是不可能的.为此,通常假设在同样的气压水平上大气温度为常数,并取Tm(K)为P0和P之间大气层中的平均温度,则有

换成以10为底的对数,并用百分度表示温度后,有

式(6)称为 Laplace 压高方程[7,10],即为利用气压值测定高度的基本公式.其中,Tm=(T0+TR)/2,T0是基准点温度,TR是接收机测点测量值.
由式(6)可知,要确定用户接收机处的高度,需要准确地测定:①用户接收机所在处的气压P及温度T;②气压校正基准点高度、气压和温度,即 h0,P0和 T0[6-7].要实现气压测高的目的,除了要精确获取气压校正基准点的h0,P0和T0及接收机所在处的P和T以外,还必须把测得的基准点的h0,P0和T0值及时传输至接收机.
由上述推导可知,获取基准点的h0,P0和T0是气压测高方法的基础.只有确切知道了基准点的有关信息,才能得到用户接收机的绝对高程,若高程作为约束条件参与卫星定位量测方程组的求解,便可以得到高精度的位置解.所以为了提高卫星定位量测方程组解的精度,基准点的选取就变得尤为重要,这关系到系统的可行性、实用性以及定位精度等问题.
2 差分气压测高实现方法
GPS全球定位系统还存在以下几点不足:
一般情况下GPS的垂直精度低于水平精度.在城市、森林或室内等复杂环境,由于卫星信号的强度严重衰减,或者受到多径信号以及一些干扰的影响,一般接收机无法正常工作.
对于城市高楼密集区的“城市峡谷”和位于深山峡谷中的水库、电站、矿区等地,GPS接收机天线容易受到遮挡,使得天线接收到的GPS卫星数减少,通常情况下只有2~3颗甚至更少的可见星,从而导致GPS定位精度大大降低,甚至在某些时候完全不能定位.针对这些情况提出利用已发展完备的地面移动通信基站作为气压差分测量基准点的差分气压测高的方法.
地面移动基站在全国范围内分布广泛,且已覆盖我国大部分区域,又有通信广播链路可以传送气压校正点的有关信息,所以可以作为卫星导航系统的气压测量基准点,给附近的用户提供基准点的高度、气压和温度等信息.由于移动通信基准站的布设较为密集(见图1),利用移动通信基站作为气压基准测量点之后,可以实现局域及区域气压差分应用,能够极大地提高用户接收机的定位精度[11].这比把各气象站测量点的气压和温度值编入导航电文,通过卫星转发至用户接收机的广域气压差分的方法有了较大的改进.
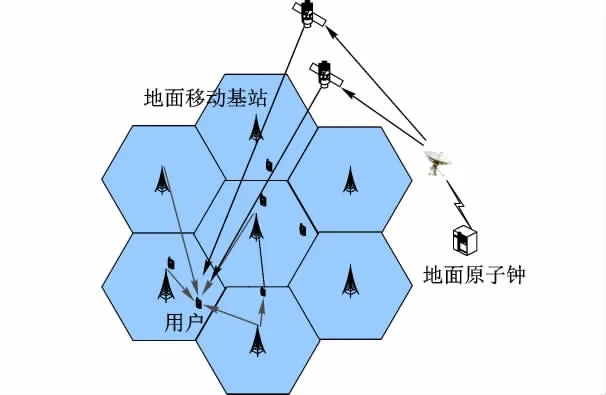
图1 理想六边形蜂窝小区覆盖图
1)地面移动通信基站分布密集.地面移动通信基站是以蜂窝小区为单元覆盖服务区域的.在人口稠密区,小区设置稠密,所以是较理想的气压差分基准测量点.用户接收机接收到附近若干个基站的信息后,从这些信息中可以很方便地挑选出气压差分所需要的相关信息.
2)实时性好.由于移动基站的覆盖范围有限,用户接收机只能接收到附近若干个小区的气压信息.而附近小区移动通信基站的气压、温度的变化相似性强,且一个移动通信基站仅发送自身基准测量点的气压、温度和对应的基准高度,数据量小,这样十分有利于气压、温度数据的实时更新.这和利用卫星传输全部的气压站基准测量点的气压温度数据有很大的不同.
3)数据处理量小.用户接收机接收到的数据都是其附近移动通信基站的气压、温度等数据,距离远的移动通信基站的信号,也会因为基站覆盖范围等因素,不能被用户接收.实际上距离远的移动通信基站的信号对用户接收机是无用的,这样就可以减小用户端的数据处理的复杂度.有利于用户实时接收和快速地进行数据处理.这样在地面移动通信基站的辅助下,用户接收机可不用预先得知初始位置就可以挑选到合适的移动通信基站的信息.定位解的精度已不依赖于初始解的选取.
4)高程值的准确度更高.在地面移动通信基站处安装气压测量、温度测量的传感器,利用地面无线移动通信网把基站测量点位置处的气压测量值P0、温度测量值T0和高程位置值h0传送给用户终端.用户终端同样装有气压测量芯片和温度测量芯片,用户终端可以测得终端处的气压值P和温度值T,利用移动通信基站测量点的h0,P0,T0值和终端测点的P,T值之间的对应关系,计算得到各终端测量点处的高程.终端处的测量值P,T和移动通信基站气压测量点的测量值h0,P0,T0,是通过地面无线移动通信传输链路进行测量值传输的.由于地面无线移动通信网基站分布密度大,传输能力强,所以利用移动通信基站作为基准点,基准点与测量点之间的距离间隔比较小,测量数值间的相似性极好,高程的相对计算精度会很高.若把移动通信基站测量点的高程测量得很准确,则用户的绝对高程测量精度也会很高.
综上,若用户接收机位于某地面移动通信基站附近,就可以用该基站测量点的高度、气压和温度值h0,P0和T0作为用户接收机的高度折算参考基准,并利用式(6)计算用户接收机的高度值;当用户接收机能接收到临近几个移动通信基站的气压、温度和高度值时,也可以用其周围临近多个移动通信基站气压等测量值经过插值处理[12]计算得到用户接收机的高程值.
3 试验结果分析
3.1 气压测高精度分析
2011年7月,在北京中科院奥运科技园区内使用6台气压计进行试验,把其中5台气压计放在同一水平面上,每两台气压计隔10 m的距离进行24 h的气压测量,其输出的结果如图2a所示;把第6台气压计放在不同高度上,进行24 h的气压测量,其输出的结果如图2b所示.从图2a、图2b两幅图中可以看出:同一水平面及同一垂直面上的气压值变化的一致性都很好,这是气压测高能应用的前提条件.
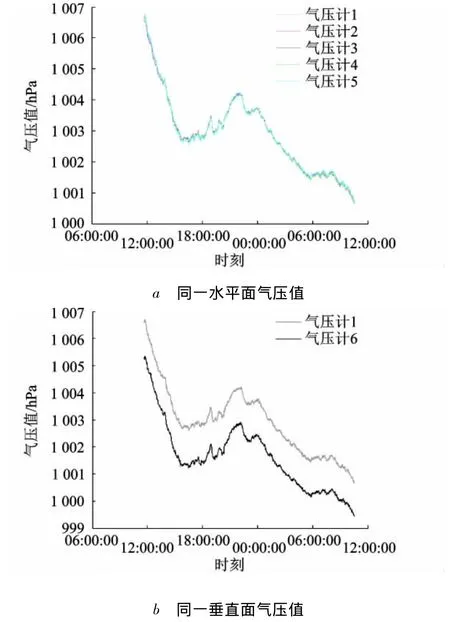
图2 各气压计输出气压值
在北京邮电大学校园内进行气压测高试验,下面从气压测高的分辨率和测高精度两个方面进行分析.
3.1.1 分辨率分析
在北京邮电大学校园内进行了气压测高分辨率的试验,气压输出的时间间隔为1 s,流动站气压计以0.15 m的高度逐次抬高,每次测试时间间隔为600 s.测试结果如下:流动站气压计每抬高0.15 m,流动站和基准站的平均气压和温度值如图3所示.流动站从低于基准站逐渐移动至高于基准站,其气压值从高于基准站到低于基准站的气压值.由此计算流动站和基准站的相对高度值(见图4),气压测高分辨率的均方根误差值为0.181 m.3.1.2 测高精度分析
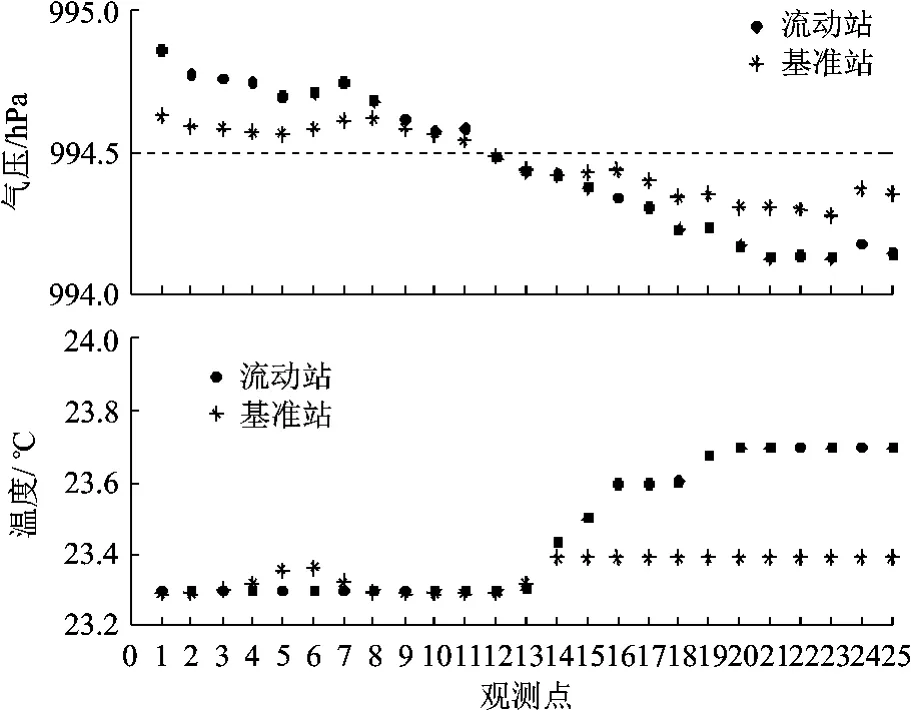
图3 流动站和基准站的相对气压温度变化

图4 气压计算高度差和实际高度差对比图
利用北京邮电大学校园内的地面移动广播试验网进行了气压测高的精度试验,气压输出的时间间隔为1 s.流动站气压计分别在室内和室外移动,每个测试点测试时间间隔为600 s.其中4个地面移动通信基站,分别距离用户接收机约为87,180,370和500 m.用户接收机和4个移动通信基站的气压和温度值变化如图5所示.
根据图5的气压和温度测量值,由式(6)进行测量点高程折算.根据折算值统计出室内外测高的误差值,并列于表1.
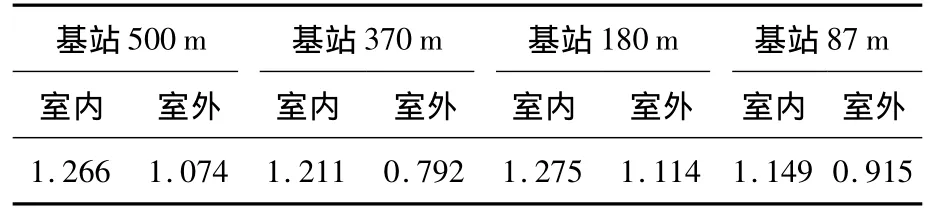
表1 气压值计算高度的室内外误差统计(均方误差值) m
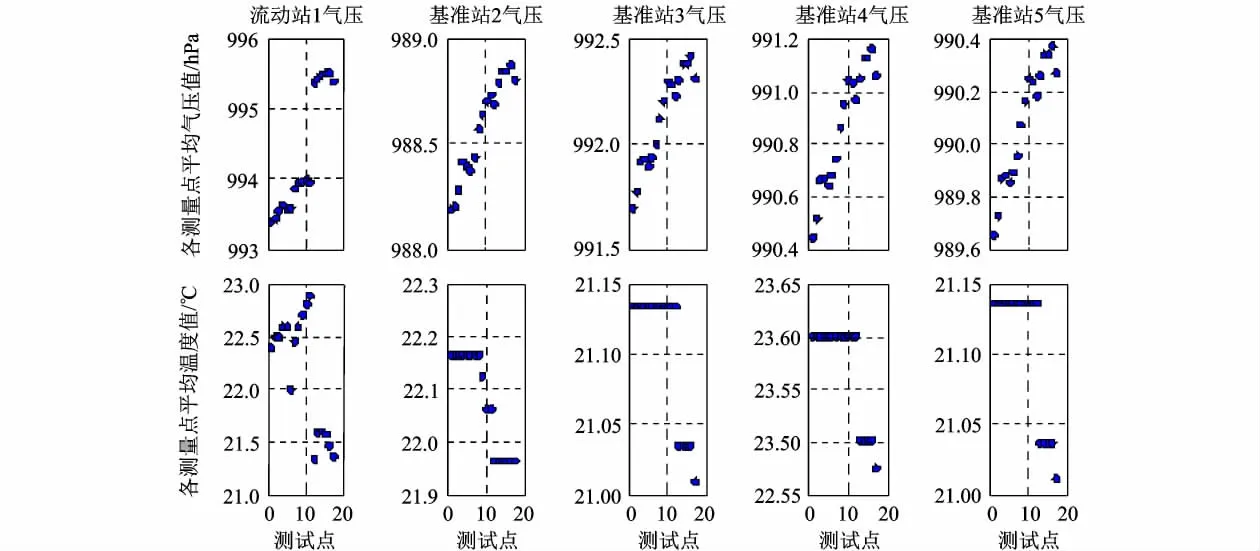
图5 流动站和基准站的相对气压及温度变化
从表1可以看出,由距离远的移动通信基站的气压和温度值计算所得的用户接收机的绝对高度的精度要稍低于距离近的移动通信基站的气压温度值计算所得的用户接收机的绝对高度,这也就说明用户接收机的高度的准确度受到基站远近的影响.但是这种变化在用户接收机距离移动通信基站一定范围之内,对高程精度的影响并不大.对于室内测高,精度会稍差于室外精度.由此可以得出:利用地面移动通信基站作为气压差分校正基准点,可以有效地减小用户接收机距离气压校正测量点的远近带来的测高误差.
3.2 气压测高误差对定位结果的影响分析
在卫星导航定位系统中,气压测高的效果相当于增设了一颗虚拟星座,即相当于有一颗虚拟卫星处于地球中心点附近,测得的高度值相当于增加了一段伪距值,所以能起到一颗虚拟导航卫星的作用[9,12].这种情况下的观测方程为
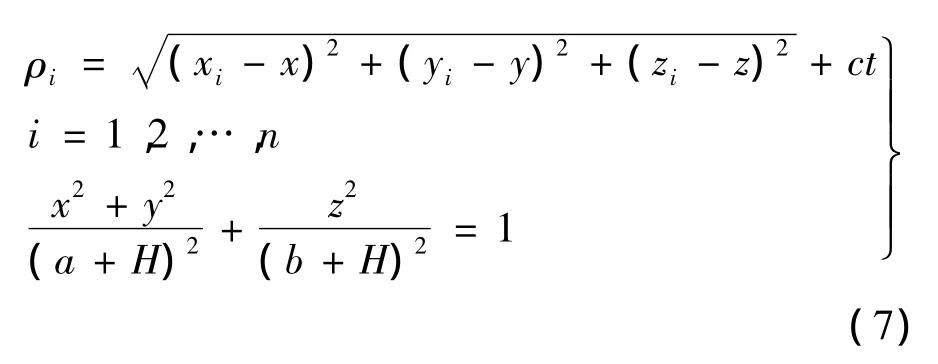
式中,a,b分别为地球基准椭球的长半轴和短半轴;H为椭球高即用户至地球基准椭球的高度,并且H=N+h,h为海拔高即用户至大地水准面的高度;N为大地水准面差距,即从椭球面到大地水准面的大地水准面高度,可通过查询数据库获得[1,12].式(7)中的最后一个方程式即为地球椭球约束方程.该约束是一个近似方程,如图6所示.正确的椭球约束面是一个离基准椭球面高度为h的近似椭球面,因为h远小于基准椭球的半长轴a和半短轴b,使用半长轴和半短轴分别为a+H和b+H的几何椭球来代替,并不会引起很大的偏差.
3.2.1 PDOP的影响

图6 基准椭球面加厚h后的椭球子午剖面示意图
以GPS为例,在无遮挡的开阔地带,接收机能接收到大约8~12颗卫星的信号,PDOP(Position Dilution of Precision)值大约为2.当接收机位于中科院奥运科技园区国家天文台A、B座楼房之间时,部分卫星信号被遮挡,仅能接收到4颗卫星的信号,此时的PDOP仅为6.若在附近移动通信基站布设气压测高设备,则此时PDOP有不同程度的减小(如表2所示).由此可见,地面移动通信网提供气压测高基准观测点的参数,用户接收机利用其气压和温度测量值计算得到接收机处的高程值,则GPS定位系统的DOP值会得到较大改善.

表2 地面移动基站对GPS系统PDOP值的改善情况
3.2.2 定位精度的影响
在没有其他技术的辅助下,仅用观测的GPS卫星进行定位,定位数据输出时间间隔为1 s,得三维位置误差见图7.在使用地面移动通信网气压测高辅助定位后,三维位置误差见图8.其中高程方向上的三维误差减小尤为明显.
由表3可以看出:仅用观测的GPS卫星进行定位,三维位置误差为6.25 m.使用气压计辅助定位后,三维位置误差为2.515 m.纬度方向上减小28%,经度方向上减小47%,高度方向上减小79%.
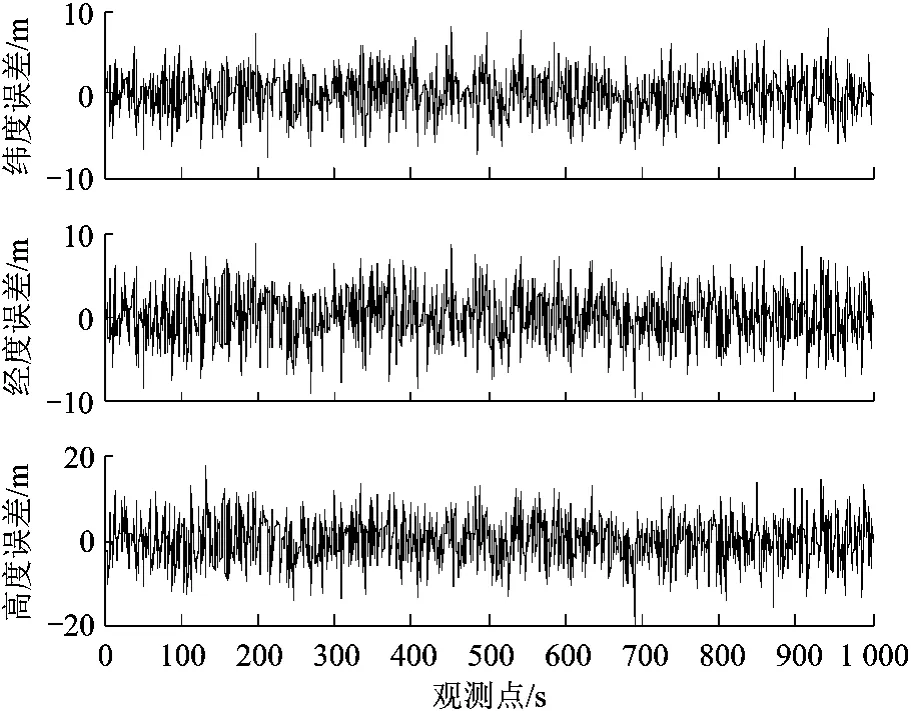
图7 GPS定位系统的定位结果
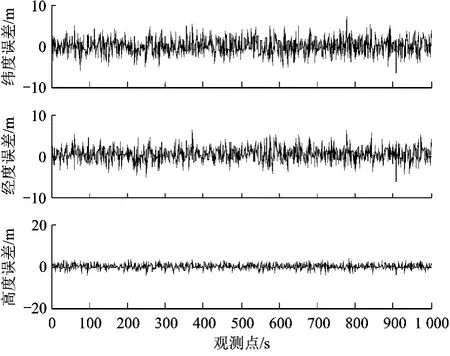
图8 GPS定位系统结合气压测高的定位结果
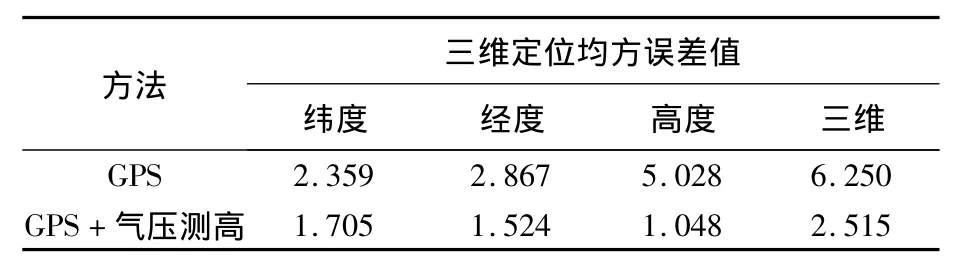
表3 GPS定位系统使用气压测高前后的定位误差 m
4 结论
考虑到地面移动通信基站的分布密集,并有通信传输能力,本文提出一种基于地面移动通信基站的差分气压测高方法,利用移动通信基站作为气压测高基准点辅助GNSS接收机实现较高精度的导航定位.结合地面移动广播地面试验网的测高试验表明:该方法可以有效地减小用户接收机距离气压校正测量点的远近带来的测高误差.将该方法应用于GNSS接收机的定位解算后,再结合高程约束方程,可以大幅度改善用户的三维定位精度,能有效弥补GNSS高程精度差的不足,实现室外的高程定位精度小于1 m.也能较好地解决因卫星星座布局不理想或被遮挡时,定位精度恶化的问题.上述高程定位方法同样也可以用于室内网络定位,其室内高程定位精度可达到1 m,不受室内环境的影响,可以解决室内楼层的分辨问题,从而为室内定位解决了最基本的一步.
References)
[1] Parkinson B W,Spilker J J,Axelrad P,et al.Global positioning system:thory and applications,volsⅠand Ⅱ[M].Washington,DC:American Institute of Aeronautics and Astuonautics,1996
[2] Cui Junxia,Shi Huli,Chen Jibin,et al.The transmission link of CAPS navigation and communication system[J].Science in China Series G:Physics,Mechanics & Astronomy,2009,52(3):402-411
[3] MeLellan James F,Schlepper John.GPS/barometry height-aided positioning system[C]//IEEE 1994 Position Location and Navigation Symposium.Las Vegas:IEEE,1994:369-375
[4]刘家兴,陆明泉,崔晓伟,等.北斗无源定位的虚拟卫星算法[J].清华大学学报:自然科学版,2009,49(1):49-52 Liu Jiaxing,Lu Mingquan,Cui Xiaowei,et al.Virtual satellite algorithm for Beidou passive positioning [J].Journal of Tsinghua University:Science and Technology,2009,49(1):49-52(in Chinese)
[5] Ai Guoxiang,Shi Huli,Wu Haitao,et al.Positioning system based satellite communication and Chinese area positioning system(CAPS)[J].Chin J Astron Astrophys,2008,8(6):611-635
[6] Ai Gguoxiang,Shi Huli,Wu Haitao,et al.The principle of the positioning system based on communication satellites[J].Science in China Series G:Physics,Mechanics & Astronomy,2009,52(3):472-488
[7] Ai Guoxiang,Sheng Peixuan,Du Jinlin,et al.Barometric altimetry system as virtual constellation applied in CAPS[J].Science in China Series G:Physics,Mechanics & Astronomy,2009,52(3):376-383
[8] Ji Yuanfa,Sun Xiyan.Analysis on the positioning precision of CAPS[J].Science in China Series G:Physics,Mechanics & Astronomy,2009,52(3):328-332
[9] Shi Huli,Pei Jun.The solutions if navigation observation equations for CAPS[J].Science in China Series G:Physics,Mechanics & Astronomy,2009,52(3):434-444
[10]盛裴轩,毛节奏,李建国,等.大气物理学[M].北京:北京大学出版社,2003:20-25 Sheng Peixuan,Mao Jiezou,Li Jianguo,et al.Atmospheric physics[M].Beijing:Peking University Press,2003:20-25(in Chinese)
[11]过静珺,王丽,张鹏.国内外连续运行基准站网新进展和应用展望[J].全球定位系统,2008(1):1-10 Guo Jingjun,Wang Li,Zhang Peng.The application and expectation of CORS in international and China[J].GNSS World of China,2008(1):1-10(in Chinese)
[12]施浒立,孙希延,李志刚.转发式卫星导航原理[M].北京:科学出版社,2009:40-41 Shi Huli,Sun Xiyan,Li Zhigang.Generalized extended approximation method in engineer science[M].Beijing:Science Press,2009:40-41(in Chinese)
