旋转磁场导向定位方法研究与应用
2013-10-25刘庆龙
刘庆龙
(1.中国石油大学石油工程学院,山东 青岛 266555;2.中石化胜利石油管理局钻井工艺研究院,山东 东营 257017)
0 引 言
复杂结构井包括煤层气开发中的水平对接连通井、稠油热采中SAGD成对平行井以及可溶性盐卤矿开采井等都对高精度导向定位技术提出了较高要求[1],而传统的随钻测量设备(基于地磁导向的连续测斜系统和惯性导航的陀螺测斜系统)都是针对单一井眼进行轨迹测量[2-3],前者虽然定位精度较高,但易受干扰;后者存在时间积分漂移误差,也不能满足高精度导向定位需求。
在复杂结构井轨迹控制与引导中,为减小导向定位误差,提高中靶精度,亟待开展从目标靶点引导钻头钻进的高精度导向定位新方法的研究。国内外先后提出了开展有源交变磁场的闭环导向定位技术的研究,如 AI-Khodhori[4]验证了该系统在水平井导向定位的可行性等。
国内外提出的几种直接测量源端钻头和目标靶点间相对位置与方向的方法[5],均基于静态磁偶极子模型[6],无法直接用于精确定位。将交变磁场作为信号源,其幅度和相位均随时间变化而变化,不易受静磁场等其他因素干扰,同时可以避免开环系统所造成的误差累积[7-8]。
为了测量源端钻头与目标端探管的相对位置,提出了一种基于动态旋转磁偶极子模型的有源交变磁场导向方法,并基于自主研发的交变磁场定位系统进行了实际应用和分析。
1 导向算法的数学模型分析
1.1 静态磁偶极子传播特性模型
如图1所示空间坐标,根据毕奥-萨伐尔定律,远场P(r,θ0,φ0)的磁场强度为
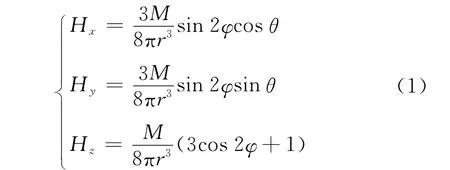
式中,M为等效磁矩,A·m2。

图1 空间任一点磁偶极子磁场分析
1.2 动态旋转磁偶极子传播特性模型
将永磁体放在近钻头位置处,以近钻头井下钻具(BHA)为载体,建立直角坐标系,其中Y轴与井下钻具的轴向相一致。近钻头磁源旋转所产生的交变磁场可看作一对相互正交的振荡磁偶极子、叠加产生,等效于一个交变合磁场。Ms与Z轴方向重合,Mc方向与X轴方向重合(见图2)。

图2 旋转磁偶极子产生磁场的等效模型
假设钻头旋转速率为ω,rad/s,t时刻后源端旋转过的角度为ωt,则正交磁偶极子等效为
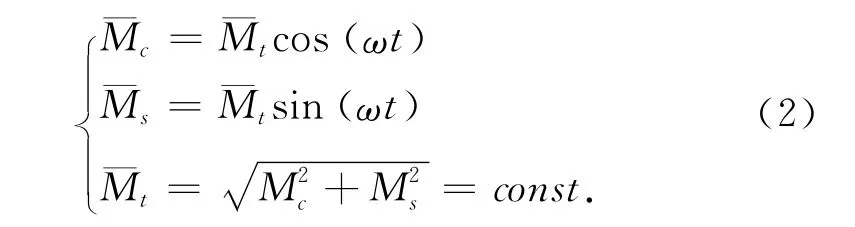
可知,旋转磁场在XY轴分量上正交等幅。

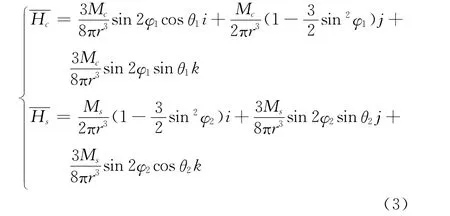
则旋转磁偶极子在空间任意P点的磁场强度H为

2 动态旋转磁偶极子的特征磁场构造
建立近钻头磁源与目标端的空间引导模型见图3。
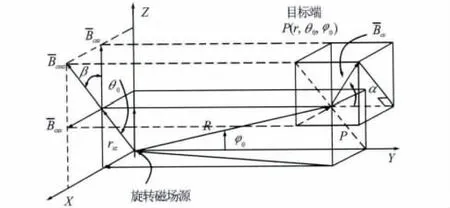
图3 空间数学引导模型
其中Y为近钻头旋转轴,P为此空间中任意一点,即测量单元的传感器所在位置为彼此正交的一对磁偶极子,磁矩大小分别以Mc、Ms表示,三者之间两两垂直,构成直角坐标系,则Mc、r、Bc共面,Ms、r、Bs共面。构造参考场Bcs=Bc×Bs,可得
定义与Y轴的夹角为α,则有

结合上述几何关系可知,距离矢量r、旋转轴Y、构造参考场Bcs在同一平面内,因此,Bcs在xz平面内的投影Bcsxz和r在XZ平面内的投影rxz重合,从而得到XZ平面内方位角
另一方面,由于磁偶极子的动态旋转,P点磁场被椭圆极化,使得P点的磁场强度的最小值与距离r之间满足

从而确定源端钻头与目标探管的相对位置关系。
3 系统应用与分析
3.1 旋转磁场导向定位系统模型
首先建立有源交变磁场导向定位系统的物理模型(针对连通井),如图4所示构建空间拓扑结构。有源交变磁场导向定位系统主要包括源端近钻头磁极系模块、司钻指示控制单元、目标端井下单元、目标端地面单元和远距离传输单元。以交变磁场为载体,将上述各单元耦合为一个完整的闭环系统。
目标端井下系统中的传感器单元含有高灵敏度磁传感器及加速度传感器,源端近钻头磁极系模块产生的交变磁场信号以及地磁场信息、加速度信息被传感器单元捕获之后,通过单芯电缆上传至地面系统,由地面系统软件进行数据的解算、处理和显示,得到目标靶点相对于源端钻头的距离和方位关系,然后经过数传电台、公用网络等通讯工具传输至源端的司钻指示设备,指挥源端钻铤的钻进方向,引导钻头向目标靶区精确钻进。

图4 旋转磁场导向定位系统模型
3.2 实际工程应用
中马U1对接连通井位于河南省焦作市马村区安阳城乡张田河村(已拆迁)以南110m处。实际钻井作业中,将进口RMRS仪器作为实际钻井导向工具进行轨迹控制,国产RMRS仪器作为辅助工具,一次对接成功。在2井口距离82.69m时,进口RMRS仪器与国产RMRS仪器均检测到可用信号,40m处测得良好数据(见图5)。图5(a)为进口RMRS仪器测得传感器数据,图5(b)为国产RMRS仪器测得传感器数据,均具有良好的正弦特征。以进口RMRS仪器为准,5m为间隔,进行解算数据对比,国产RMRS仪器解算偏航角差见图6。

图5 距离目标端40m处信号波形

图6 国产仪器与进口RMRS仪器偏航角差
4 结 论
(1)从动态磁偶极子模型角度分析了旋转磁场导向定位方法,并以河南焦作中马U1对接连通井为例进行了工程应用说明。
(2)在水平定向连通作业过程中,以国外进口RMRS仪器为基准,将自主研发的国产RMRS仪器采集数据和解算结果与之对比。结果表明,偏航角差最大2.05°,最小0.47°,国产 RMRS仪器具备高精度井轨迹定位能力,可以满足实际工程应用需求。
[1]张绍槐.现代导向钻井技术的新进展及发展方向 [J].石油学报,2003,24(3):82-85.
[2]Macmillan S,Mekay A,Grindrod S.Confidence Limits Associated with Values of the Earth’s Magnetic Field Used for Directional Drilling[C]∥SPE 119851,2009.
[3]Pecht E,Mintchev M P.Observability Analysis for INS Alignment in Horizontal Drilling [J].IEEE Trans.Instrum.Meas.,2007,56(5):1997-2006.
[4]AI-Khodhori S,AI-Riyami H,Holweg P,et al.Connector/Conductor Wells Technology in Brunei Shell Petroleum Achieving High Profitability Through Multi-well Bores and Downhole Connections [C]∥SPE111441,SPE/IADC Drilling Conference,Orlando,Florida,USA,2008.
[5]胡汉月,陈庆寿.RMRS在水平井钻进中靶作业中的应用 [J].地质与勘探,2008,44(6):90-93.
[6]Marschner U,Fischer W J.Indirect Measurement of a Bar Magnet Position Using a Hall Sensor Array[J].IEEE Transactions on Magnetics,2007,43(6):2728-2730.
[7]宗艳波,张军,史晓锋,等.基于旋转磁偶极子的钻井轨迹高精度导向定位方法[J].石油学报,2011,32(2):1-5.
[8]史晓锋,李铮,蔡志权.随钻电磁波测量工具探测深度研究 [J].测井技术,2002,26(2):113-117.
