车用轮速传感器的信号检测与分析
2013-10-24郭凤
郭凤 雨 , 张 磊
(1.中国矿业大学 信电学院,江苏 徐州 221008;2.淮海工学院 电子工程学院,江苏 连云港 222005)
车用轮速传感器是影响车辆驾驶性能的重要部件,通过轮速传感器对齿轮速度进行测试,可以使车辆速度参数更加精确,对于改善驾驶的可控性、提高ABS系统的可靠性以及保障行驶安全和减少交通事故的发生具有重要意义。
然而,纵观目前车用轮速传感器的测试行业,可发现对车用轮速传感器的测量方法有待改进。其主要方法囊括起来,大概有以下几种:
(1)通过示波器或计数器来检测轮速传感器感应转动齿轮所产生的电压信号,以此来判断传感器好坏,即无上位机软件。
(2)用单片机做下位机、LabVIEW或其他软件做上位机对轮速传感器进行检测。
(3)用LabVIEW和数据采集卡对轮速传感器进行检测,但功能单一,只能对单一信号类型的传感器进行检测。
以上几种方法效率低不适合批量检测,且有的没有友好的界面,不利于工作人员观看,有的只能对单一信号类型传感器进行检测和不能进行很好的扩展,满足不了检测工业的快速发展的要求。所以,一款成本适中,可适用于多种信号类型的传感器的多通道检测且效率高的汽车轮速传感器测试系统,就显得尤为必要。本文主要介绍该系统的信号检测和分析部分[1]。
1 系统总体结构
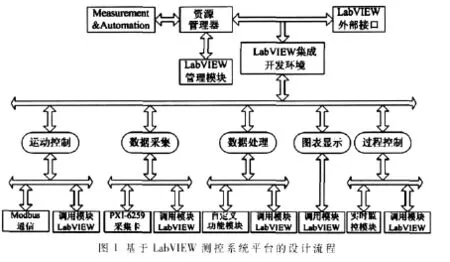
该系统平台方案的设计流程如图1所示,其核心是LabVIEW集成开发环境,通过它进行软硬件的统一调配。通过Measurement&Automation对NI采集卡进行硬件的自检、调试、仿真及采集等。通过LabVIEW外部接口(如串口、GPIB、Modbus等)连接外部设备(如伺服电机、示波器等)。通过LabVIEW软件强大的功能模块,对想要实现的功能进行编程,从而实现本系统主要功能:运动控制、数据采集、数据处理、图表显示、过程控制及数据保存与回放等。
2 传感器部分
本系统的测量对象为主动式轮速传感器(AWSS)、被动式轮速传感器(PWSS)和凸轮轴传感器(ACPS),对应的信号类型为三电平、正弦波和方波信号。
为了获得较精确的可控速度带动齿轮旋转,以便提高传感器检测的准确度和精度,通过LabVIEW控制伺服驱动器,以此控制伺服电机带动齿轮的旋转速度,从而获得传感器轮速信号。针对不同种类传感器所获得的三电平信号、方波信号、峰峰值信号的不同特点,提取信号的共同特征,设计出可以满足三种信号测量的软件程序[2]。
3 信号测量
3.1 三电平信号的测量
在LabVIEW后面板函数中,无直接测量三电平参量的VI,所以对三电平测量就无法利用相关信号测量VI进行测量。对三电平进行测量需要利用到数组和采样速率。采样速率即每秒钟进行模数转换次数,通过将采集来的信号转换为数组常量,便可通过采样速率及数组,对三电平相关参量进行测量。其方法如下:
由于主动式轮速传感器采集到的信号的特点,即每转过一个轮齿就对应采集到一个高电平和若干中、低电平,且高电平持续时间很短。所以,周期的计算方法以高电平作为周期判断标准,若齿轮转动时,轮齿1、2、3对应地产生 3个周期的三电平信号为 S1、S2、S3。当 S1周期循环停止时,next数值即为下一周期即S2的首地址。先对移位寄存器重新赋起始值,然后对S2进行测量,当循环停止时,next数值为S3首地址,再对移位寄存器重新赋起始值,然后对S3进行测量。如此重复进行,将所有轮齿产生的三电平信号,通过齿轮轮齿数设置循环次数,最外层循环设置齿轮转的圈数,即可对三电平周期和占空比进行多周期测量。
通过上述可知,首先是测量一个周期采样数值,然后赋下一周期移位寄存器初值,这样才能测下一周期,所以对应齿数为n的齿轮,若对所有轮齿产生的信号进行测量,其外层循环次数应为:
所得数组的偶数项元素,如(D[0]、D[2]、D[4]…)为测得的信号 S1、S2、S3…的周期采样数值。而数组的奇数项元素D[1]、D[3]、D[5]…对应的是赋值给S2、S3…寄存器的起始值。所以需将偶数次数组数值选出,组成新的数组Sam[i]。对新的数组求和除以齿数,即可得到齿轮转动一周所有轮齿的平均采样点数。即平均周期为:

而每一个轮齿对应的周期为:

其中SAMPLE为采样速率。
但上述测量程序存在缺陷:若刚开始采集时,不是从低电平、中电平或是高电平的起始处而是从高电平中段某处开始,如图2所示,这样三电平信号的第一个周期肯定有较大误差。

可通过以下方法进行解决∶如齿数为n,则原来需测量的齿轮转动一周各齿的采样点数的数组为:Sam[0]、Sam[1]…Sam[n-1]。现多测量一个轮齿,即重新测量采集开始时的轮齿的采样点数,数组为:Sam[0]、Sam[1]…Sam[n-1]、Sam[n]。去除数组的第一个值 Sam[0]。齿轮转动一周对应的周期即为:

原来对应的外层循环为:N=2n-1
现需改为:N=2(n+1)-1=2n+1
而每一个轮齿对应的周期为:

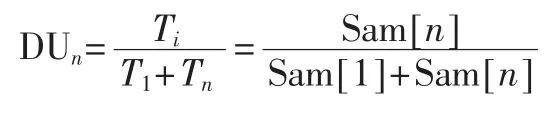
占空比的计算方法:三电平信号的占空比算法与方波信号的占空比算法有区别,后者用周期中高电平时间除以周期,而前者利用的方法为:通过平均周期的优化算法后,占空比计算方法为从第二个轮齿开始,即第二个轮齿占空比是第二个周期时间除以第二、第三两周期之和,第三个轮齿占空比是第三个周期时间除以第三、第四两周期之和,以此类推,而最后一个轮齿即第n个轮齿占空比是最后一个周期时间除以最后一个和第二个两周期之和。


而第n个轮齿占空比为:
平均占空比为∶

对应的周期与占空比的测量程序如图3所示。
高中低三种电平数值的测量,通过上述用采样率及数组的方法。通过高-中阈值和中-低阈值分离出信号中满足各自条件的数值序号,然后通过一维数组索引分离将满足条件的元素序号选出。即可通过数组相关VI计算出相应的高、中和低电平数值[3]。
3.2 方波的测量

方波的周期、占空比的测量方法,如图4所示,采用for循环结构,给定齿数N作为输入,i+1作为脉冲号输入,循环n次,测量结果以一维数组形式输出,数组中的值即对应每个方波的周期、占空比的值。
然而,对于方波的测量,其重点在于:单个方波各参量的最大相对误差的测量。它不仅可作为衡量传感器质量好坏的一个指标,同时,也可以作为程序的一附加功能,即对齿轮进行检测。
由于每个轮齿对应一个方波信号,通过对轮齿信号的采集及处理,可以判断齿轮是否漏齿以及其他轮齿不合格等情况。以方波信号的占空比误差计算为例,简单说明附加功能的实现。
占空比(Duty cycle)误差计算如下:其中Dm是齿轮转动一个轮齿后获得的一个方波信号的占空比,Dstandard是标准的占空比或者是齿轮转动一周测得所有轮齿产生的方波信号占空比的平均值。
占空比最大误差计算方法:

假设该齿轮的轮齿数为Num个,齿轮转动一周,共采集到传感器输出方波信号Num个,通过LabVIEW中相关 VI可测得每个方波信号的占空比,即D1、D2、D3…DNum,通过数组最大值与最小值 VI,可将该一维数组中最大值与最小值取出,假设为Da与Db,则:

而占空比的最大误差值为:

以上就是最大占空比相对误差的实现,若误差超过某范围,则说明轮齿分布不均。当然还包括其他参量相对误差,若超过某范围,则说明轮齿高低不一致、或齿间存异物等。此处不再赘述[4]。
3.3 正弦波的测量
正弦波信号的测量主要涉及的参量为周期、频率、峰峰值等。另外与方波、三电平信号不同,正弦波信号还需测量是否波欠。这是因为正弦波的相关参量在直接通过Express VI滤波后,需通过测量频率、周期、峰峰值的相关Express VI函数进行测量。
通过此方法测量值为一次读取的采样点数的信号的平均值,即若一次读取多个周期正弦波,则测得的频率、周期、峰峰值等相关值为这几个周期信号的平均值,所以若存在缺齿,则在信号上即反应为波欠。存在波欠的情况下,测量值的周期、频率肯定会存在较大偏差,因此很有可能导致对传感器误判。因此判定是否波欠是十分必要的。而方波、三电平信号则不同,这两种信号相关参量的测量值,都是通过每个齿轮的轮齿产生信号对应的方波或三电平信号值,即测得的是单个方波或三电平信号的周期、频率和电平值。然后根据一定量的波数,求得这些方波或三电平信号的平均周期、频率和电平值,一般取齿轮的齿数为此数值。所以不需判断是否存在波欠。正弦波信号相关参量的测量是直接测得一定周期数量的正弦波信号的平均数值,因此必须判定该正弦波个数是否与对应齿数相等,若相等,则相关参量值可以作为判定传感器好坏的数值使用,若不等则舍弃此组数值。
波欠的检测采用波峰波谷双检测的方法,如图5所示,分别测量波峰与波谷个数,然后平均即可求得。在此应注意,阈值和宽度是两个非常重要的参量,此参量设置的好坏直接影响着正弦波测量个数的正误。

4 传感器的判断
通过上述方法对不同类型的轮速传感器对应的不同信号类型进行了测量,这些参数测量完毕后,就需和正常传感器采集信号的标准值做比较,看其结果是否在允许偏差范围,若是,则合格。如图6所示,是单个通道中,三电平信号的测量程序和传感器判断的测试程序[5]。

图6 单通道的测量与测试程序
该车用轮速传感器的信号检测与分析系统是集合运动控制平台、信号分析与处理等多平台的系统。由于对轮速传感器的测量需在几组目标转速下测量,如齿轮转动 100 r/min、500 r/min、1 000 r/min 与 2 000 r/min,这就需要系统有一个良好的伺服电机控制平台,控制伺服电机转动。当实际转速与目标转速的偏差在允许范围内时,程序跳转到数据采集状态,通过PXI-6259对数据进行采集,采集一定的数据后,电机跳转到下一目标转速,以此往复再进行测量,直至测量完最后一组数据,程序退出并初始化,以便下一轮测量[6]。
经工厂测试验证,该系统可正常、高效地进行测量与判断。同时,可进行相关数据保存与回放,以便对系统进行评估。并且,该系统有很强的扩展性,其扩展功能包括对齿轮的检测等,在此就不再赘述。
[1]韩英,李景涛.基于 LabVIEW的温度监控系统设计[J].机械工程与自动化,2010(2):175-177.
[2]MOLL J,GOLUB M V,GLUSHKOV E,et al.Nonaxisymmetric Lamb wave excitation by piezoelectric wafer active sensors Sensors and Actuators,2012(174)∶173-180.
[3]田锦明,龚成龙,陈瑞.32通道汽车传感器非连续信号监控系统[J].仪表技术与传感器,2011(11):60-62.
[4]吴俊勇,闫振靖,魏跃平.基于LabVIEW的多通道低温实验测试系统[J].自动化技术与应用,2001,30(2):73-77.
[5]杨鹏,王世耕,陈国聪.多通道多传感器的信号调理及数据采集系统的研制[J].机械与电子,2007(7)∶18-20.
[6]陈树学.LabVIEW宝典[M].北京:电子工业出版社,2011.