静态上下车装置在矿山大坡度可摘挂抱索器架空乘人装置中的应用
2013-10-22林春年肖公平
林春年,肖公平
(湖南湘潭恒欣实业有限公司,湖南 湘潭 411300)
在没有静态上下车装置的煤矿架空乘人装置中,为了安全,国家标准规定:乘人座椅的运行速度不能超过1.2m/s。故运输效率受到制约,且对乘座者仍有一定安全隐患。为了崇尚安全和高效,湘潭市恒欣公司开发了矿用大坡度静态上下车装置,即使乘座者享受到在静止状态中上车和下车的舒适感,又使运人速度上限提高到3 m/s;提高了乘座者的安全性和运送效率,填补了架空乘人装置的一项空白。
1 静态上下车装置的结构
静态上下车装置由乘座系统、轨道系统、托压轮系统、安全系统、报警系统组成。

图1 乘坐系统
1)乘座系统:见图1。轨道滑行器见图2,由抱索器壳体、支撑轴、轴承组成。卡钳抱索器见图3,通过连接轴与轨道滑行器及吊椅采用螺钉连接成一体。卡钳抱索器见图4,有两个卡爪,用于抱住钢丝绳;卡钳抱索器和吊椅均可绕过轨道滑行器上的连接轴摆动。

图2 轨道滑行器

图3 卡钳抱索器

图4 卡钳抱索器
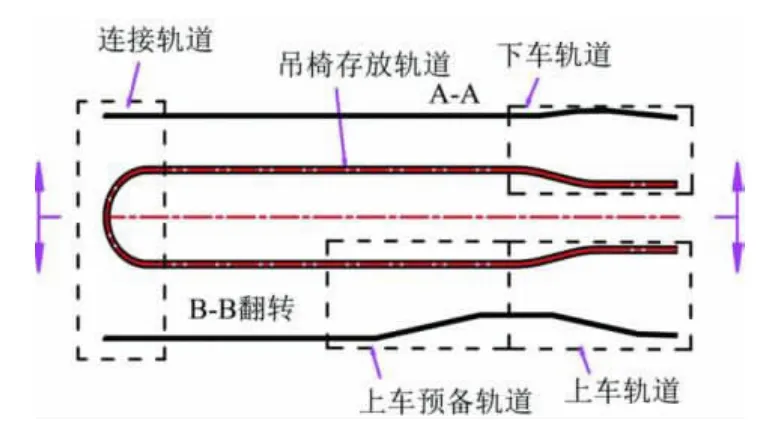
图5 轨道系统
2)轨道系统:见图5,由上车轨道、下车轨道、上车预备轨道、吊椅存放轨道、连接轨道、悬挂轨道的吊架组成。
3)托压轮系统:由若干组双托轮、托压轮、固定支架组成,它们确定了钢丝绳与轨道之间的相对位置。
4)安全系统:由防摆钢轮、放行闸板、卡钳导入装置组成。防摆钢轮可有效限制钢丝绳上下左右的摆动,保持与轨道的相对位置。放行闸板可使人在坐稳后拉闸放行。卡钳导入装置可以准确地引导卡钳抱索器卡住钢丝绳。
5)报警系统:由报警轮、传感器、语音装置组成。如果托压轮系统中的轮衬磨损造成钢丝绳的位移,导致报警轮转动时,则由报警系统实时监测及语音报警,提示维护人员维护钢丝绳和轨道之间的相对位置,确保万无一失。
2 静态上下车装置的原理
1)静态上车原理分解为三个阶段,见图6。第一阶段,图6中乘座者在位置1处坐上吊椅,此时卡钳抱索器与运动中的钢丝绳是分离的,因此人处于静止状态。打开放行闸板后,乘座者随着吊椅上端的轨道滑行器在上车轨道上沿斜坡滑行;滑行到位置2时,轨道滑行器上的卡钳抱索器卡爪中心与钢丝绳处在同一水平高度,卡爪位于钢丝绳侧边还没有卡入钢丝绳上,此阶段为卡绳准备阶段。第二阶段,轨道滑行器从位置2沿轨道滑过一段水平圆弧到达位置3时,轨道滑行器上的卡钳抱索器卡爪,从钢丝绳侧边随之运动到了钢丝绳中心,此时卡爪已卡入到钢丝绳上,但没有接触钢丝绳,此阶段为卡绳阶段。第三阶段为抱绳阶段,此时上车轨道为一斜坡,轨道滑行器从位置3沿斜坡滑下,卡爪顺势抱住向前运动中的绳丝绳向前运行,到达位置4时卡钳已卡紧钢丝绳,靠卡紧产生的摩擦力带着吊椅一并脱离轨道进入运动状态,乘座者随之完成了由静止状态上车到动态运行的过程。

图6 静态上车原理
2)静态下车原理分解为三个阶段,见图7。第一阶段,图7中乘座者随钢丝绳运行到下车轨道上空,在下车轨道位置1处,轨道滑行器随钢丝绳变向运行落在轨道上,此阶段为下车准备阶段。第二阶段为松绳阶段,轨道滑行器在轨道上沿惯性滑行到置2时,卡钳抱索器上的卡爪与钢丝绳处于松开状态,此时卡爪仍卡在钢丝绳上,但没有接触钢丝绳。第三阶段为脱绳阶段,轨道滑行器沿平行于钢丝绳的轨道滑出一段空间弧线到达位置3时,卡钳抱索器的卡爪凌空脱开钢丝绳完成脱绳过程。之后,乘座者随轨道滑行器沿轨道滑行一段距离后静止地降落在下车轨道上,乘座者随之完成了从动态运行到静态下车的过程。

图7 静态下车原理
3 结束语
静态上下车装置经过实际使用,体现如下特点:能在架空乘人装置不停机的情况下,随意实现静止状态下的上车和下车,安全可靠;由于上车和下车不受运人速度的影响,因此运人速度大为提高,运输效率随之提高;乘座者携带重物时,在静止状态上车和下车更加方便和安全;乘座吊椅在静止状态下用来运送物资更加灵活和快捷;由于卡钳抱索器的卡爪在上车卡绳阶段和下车脱绳阶段均不接触钢丝绳,相互之间无摩擦,因此钢丝绳和卡钳抱索器都有较高使用寿命。
