一种新的光伏阵列故障诊断与定位方法*
2013-10-22董梦男
程 泽,徐 勇,董梦男
(天津大学电气与自动化工程学院,天津 300072)
0 引言
目前,光伏阵列的故障诊断方法主要有红外图像检测法和电信号检测法两类。红外图像检测法存在一些缺陷:检测精度不高,设备费用较大,实时性较差等[1]。而基于电信号的诊断方法也有自身的局限性。如日本学者提出的高频信号注入法[2],原理是通过比较注入阵列的高频信号的反射信号的不同来诊断故障,因此,不具实时性。另外,基于电压和电流传感器的故障诊断方法以及各种改进措施,虽然能够在一定程度上实现故障诊断与定位,但是依然存在所用传感器较多、定位精度较低、检测方法在大规模光伏阵列应用中难以推广等缺点。
本文提出了一种新的传感器嵌入方法,以较少的检测器件来获取必需的数据,同时将群体决策理论[3]引入到光伏阵列的故障诊断中,提高了检测的准确性和抗干扰能力,通过实验验证了提出的光伏阵列故障诊断与定位方法的有效性。
1 新型光伏阵列传感器嵌入方法
光伏阵列传感器嵌入方法应具备以下几个特点:所需传感器数量尽可能少;故障定位分辨率高;适于实际光伏阵列的故障诊断。鉴于此,本文提出了一种新的光伏阵列传感器嵌入方法,如图1所示(以8×4阵列为例)。它是在实际中应用较为广泛的串并联(SP)连接方式的基础上提出的。图中一个光伏单体图形符号表示阵列中的一个光伏组件,每一个支路中接入1只电流传感器和2只电压传感器。这里,如果阵列中有某个组件发生故障,则故障定位的范围可达到2个组件,即故障定位的分辨度为2。

图1 新型光伏阵列传感器嵌入方法Fig 1 New PV array sensor embedding method
图1中,故障光伏组件定位的逻辑判断过程为:若Ii<Ij,其中0<j<5(图1中有4个电流传感器,故这里j<5),且j≠i,则确定第i个支路中有故障发生。然后,根据电压传感器的测量值来定位故障。有以下4种情况:
1)第i个支路3,4光伏组件中发生故障
Vi1<Vj1,Vi2<Vj2,其中,1≤j≤4 且j≠i。
2)第i个支路1,2光伏组件中发生故障
Vi1<Vj1,Vi2>Vj2,其中,1≤j≤4 且j≠i。
3)第i个支路7,8光伏组件中发生故障
Vi1>Vj1,Vi2>Vj2,其中,1≤j≤4 且j≠i。
4)第i个支路5,6光伏组件中发生故障
Vi1>Vj1,Vi2<Vj2,其中,1≤j≤4 且j≠i。
通过一系列逻辑判断确定了故障组件的位置。对于一般情况的M×N光伏阵列,判断过程同理。本文提出的传感器嵌入方法利用了电压传感器测量的交叉部分,减少了传感器的数量,降低了系统的成本。
2 光伏阵列故障诊断中的群体决策理论
为避免个人决策的局限性而造成企业整体决策的失误,提高决策水平,企业的领导者就必须邀请本领域的若干专家就该问题进行共同协商。而如何从众多专家的意见中得到客观的、科学的结论,这就是群体决策理论所要研究和解决的问题[4~6]。
电流值、电压值、电池背板温度等的异常往往是故障的直接征兆,是判断故障的主要敏感参数。而环境的温度和辐照度等虽然和故障的发生没有直接的关系,但是在故障诊断过程中会影响诊断结果。所以,它们都可以算是光伏故障诊断中的决策成员。

结合光伏阵列监测与故障诊断的实际情况,进行了以下定义:
1)定义故障决策成员(电压、电流、温度、辐照度等)意见的广义距离为

其中
式中 γij和θij为2个决策成员之间意见的一致程度。
2)对于任意的d(i,j)= γij+ θij·i,定义了两故障决策成员意见的标准广义距离为

式中 θmax=90°;n为偶数时,γmax=n/2,n为奇数时 γmax=n/2-1/2n。α和β分别为排名次序和权重向量夹角的权重系数,且满足α+β=1。一般情况下,取α>β。
3)设 γA+θA·i和 γD+θD·i分别为决策成员意见高度一致和严重分歧的阈值。在光伏阵列故障诊断中,这些阈值通过采集的数据和经验来确定。QA和QD为相应的标准广义距离,故障决策意见高度一致判定函数和意见严重分歧函数分别为

4)群体意见一致判定矩阵与分歧判定矩阵GC和GD为

5)故障诊断决策成员个体意见一致指数与分歧指数

6)故障诊断决策群体中意见高度一致和意见严重分歧的决策成员所占的比例分别为

在本文提出的光伏阵列故障诊断方法中,决策成员为电流、电压、环境温度、光伏电池背板温度以及辐照度,分别记为dI,dV,dTE,dTP和dG。那么,m=5,这里,决策备选对象集为故障危害度分级评价,5种情况,即O={VL,L,M,H,VH},分别表示故障概率很低、故障概率低、故障概率中等、故障概率高、故障概率很高。那么,n=5,则上述任意2个光伏故障诊断决策成员的标准广义距离具体为
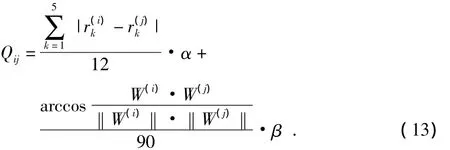
其中,i,j=I,V,TE,TP,G。再根据相应的QA和QD就可以得到光伏阵列故障群决策中的各项指标值,进而得到最后的故障诊断结果。
3 实验设计与数据分析
本文利用定制的光伏电池板进行了实验,电池板中每块电池单体是单独引线的,如图2所示,可用来模拟光伏阵列。搭建的实验平台是依据图1所示的结构。4条支路编号为1~4;温度的测量选用DS18B20数字式温度传感器;辐照度的测量选用TI公司的TSL320B光频转换芯片。这里将对实验平台采集到的数据进行综合处理。

图2 实验平台中的定制太阳能电池板Fig 2 Custom solar panels in experimental platform
实验平台采集到的模拟光伏阵列的各项数据如表1所示(每个支路上有2只电压传感器,故表1对应每个支路有2个电压值)。
利用5个决策成员分别对阵列的4条支路进行分析,由于环境温度和辐照度为间接的决策成员,所以,对其进行特殊处理:当它们正常时,偏好数据均设为0.20,且排序结果按照或即可;当它们异常时,说明光伏阵列本身故障概率降低。另外3个决策成员则按照测量值和正常值之间的偏差大小进行模糊量化处理。这里,对偏好数据的处理使用的是交叉三角隶属度函数。

表1 实验平台采集的数据Tab 1 Datas collected by experimental platform
根据第2节中的计算方法得出,第一个支路群体意见高度一致指标为0.20,严重分歧指标为0.00,意见基本是一致的,即出现故障的概率较高。再利用电压传感器的测量值进行逻辑判断,确定第一个支路上第一,二个光伏单体中出现故障。同样,经计算得出,第二,三支路光伏单体无故障。而对于第四个支路,虽然电流和电压值有下降,但其意见高度一致指标值为0.10,严重分歧指标值为0.60,这说明是由于环境或其它因素造成的“故障假象”,故不认为其发生故障。这样,通过群体决策理论对光伏阵列相关数据进行分析,避免了一些故障误判的情况。
4 结论
本文提出了一种新的光伏阵列传感器嵌入方法,在应用较广泛的串并联方式和保证故障定位精度的基础上,减少了系统所用传感器的数量。将模糊理论和管理学中的群体决策理论结合起来,并首次应用到光伏阵列的故障诊断中。实验结果表明:群体决策理论很好地利用了光伏监测系统所能采集到的光伏阵列的各种相关数据,解决了由于环境或者其它干扰因素造成的诊断不准确的问题。
[1] 王培珍,沈玉樑,杨维翰.太阳光伏阵列的温度与红外特性分析[J].太阳能学报,2005,26(1):82 -85.
[2] Takashima T,Yamaguchi J,Otani K,et al.Experimental studies of fault location in PV module branchs[J].Solar Energy Materials &Solar Cells,2009,93:1079 -1082.
[3] 朱佳俊,郑建国.群决策理论、方法及其应用研究的综述与展望[J].管理学报,2009,6(8):1131 -1136.
[4] 卫宝真.基于不确定偏好信息的专家群决策分析方法和应用研究[D].沈阳:沈阳航空工业学院,2009.
[5] 卓 越,王 红,吴秋峰.群决策支持系统中的一致性分析技术[J].控制与决策,1999,14(6):636 -641.
[6] 李 洁,沈士团,孙宝江,等.航电设备故障诊断中的决策算法[J].北京航空航天大学学报,2007,33(6):677 -681.