基于小波神经网络自适应反推的永磁同步电机位置伺服控制
2013-10-17李木国
刘 达 ,李木国
(1.大连理工大学 电子信息与电气工程学部,辽宁 大连 116023;2.大连理工大学 海岸与近海工程国家重点实验室,辽宁 大连 116023)
0 引言
永磁同步电机具有高效率、高功率密度、低噪声、低损耗、小体积等诸多优良特性,因而广泛应用于各类工业场合特别是运动位置伺服领域。伺服控制要求系统具有良好的动静态性能,即快速的动态响应和一定的稳态精度。但是永磁同步电机驱动系统自身的多变量、强耦合等非线性特性使以往的一些控制算法,如传统的PID结合矢量控制的控制策略难以满足要求[1-2],因此寻求更加有效的控制方法成为目前永磁同步电机控制领域研究的热点。
控制理论的发展特别是非线性技术的引入,为电机控制带来新的解决方法和思路,状态反馈线性化、滑模变结构、反推控制等非线性方法有效地实现了永磁同步电机的非线性解耦,同时保证了电机的精确伺服控制[3-6]。其中的反推控制通过设计虚拟控制函数将控制对象简化为多个低阶子系统,最终通过选择合适的李雅普诺夫函数得到实际的控制律,通过与自适应技术结合,适合具有不确定性的非线性系统控制[7],特别是不满足匹配条件的一类系统。其优势在于得到的控制律和不确定参数自适应律可以保证受控变量全局渐近稳定,从而使整个系统具有良好的鲁棒性。但是反推控制在设计中也存在一些缺点,例如递归矩阵引起的复杂度增加、估计项引起的奇点问题、过参数化及需要知道全部或部分模型的精确信息等[8]。
文献[6]利用反推控制跟踪电机速度和电流,保证了系统稳定,但是没有考虑到负载转矩和模型参数不确定性的影响;文献[9-12]应用自适应反推控制设计了系统控制律和不确定参数自适应律,但只考虑到部分参数的不确定;文献[13-15]采用各类状态观测器与反推法结合估计系统不确定参数,但没有考虑到观测器本身的估计误差。随着智能控制理论的发展,其已逐步渗透和深入到各类控制技术中并显示出无可比拟的优越性,文献[16-18]在运用反推法过程中利用模糊、神经网络技术逼近复杂的非线性项,简化了控制结构。永磁同步电机位置伺服控制系统不但希望电机的运动轨迹实现渐近跟踪,而且要求电流也能渐近稳定,同时对于系统的外部负载转矩扰动、内部参数摄动及非模型不确定性有良好的抑制能力,从而保证整个系统的鲁棒性。基于此,本文采用反推法设计保证系统位置、电流的全局渐近稳定,利用小波神经网络逼近设计中存在的不确定项,结合自适应技术给出非模型不确定性的参数自适应律,最终得到控制律并给出稳定性证明。相比于以往的反推控制法,文中提出的算法结构简单,考虑了所有参数不确定性,不需要知道模型的精确信息,并且克服了奇点和过参数化问题,易于实现,具有良好的工程实用价值。通过仿真对比分析可知,所设计的控制器动静态伺服性能好,对系统参数变化不敏感,有较强的鲁棒性。
1 永磁同步电机位置伺服系统的数学模型
在假设磁路不饱和,忽略磁滞、涡流损耗的影响,空间磁场呈正弦分布,并认为三相绕组对称均匀的情况下,永磁同步电机d-q轴同步旋转坐标系下的数学模型可表示为:
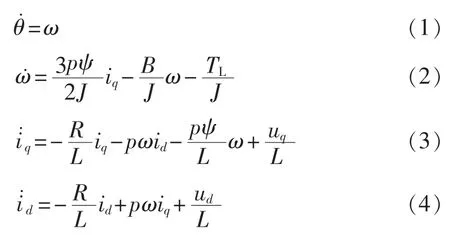
其中,θ为转子旋转角度,ω为转子角速度,p为极对数,ψ为转子永磁体产生的磁链,ud、uq为d-q轴定子电压,id、iq为 d-q轴定子电流,L为 d-q轴定子电感,R为定子电阻,J为转动惯量,B为粘滞摩擦系数,TL为负载转矩。
在永磁电机运转过程中,由于温度变化、磁饱和、负载转矩的突然增减等运行条件的改变会使电机的参数发生改变,加剧了系统的非线性,不但会使系统性能降低,还可能导致系统不稳定,因此在高性能伺服系统控制器设计中必须要考虑这些因素。
2 小波神经网络自适应反推控制器的设计
永磁同步电机位置伺服系统的控制目标是设计一个位置控制器使电机的位置输出能够渐近稳定地跟踪给定的轨迹信号。为实现这一目标,采用反推控制方法选取需稳定的状态变量构成新的子系统,通过构造合适的李雅普诺夫函数,逐级设计,最终推导出系统实际控制量的控制率。为实现位置轨迹的跟踪,定义位置跟踪误差为:

其中,θm为给定的位置信号并假设其二次可微。选择eθ为新的子系统的状态变量,将其对时间求导得:


由于在电机运行过程中工作环境的改变会导致式(2)—(4)中的参数随时间发生变化,因此在反推设计过程中要考虑到这些参数变化引起的不确定性对系统的影响,由于小波神经网络具有逼近任意复杂非线性函数的能力,因此对永磁同步电机驱动模型中由参数不确性引起的非线性项通过小波神经网络来估计补偿,从而解决系统内外扰动对控制性能的影响。
对eθ、eω组成的子系统选取李雅普诺夫函数对其求导并将式(2)代入可得:

其中,ΔA、ΔB、ΔC为系统参数不确定性引起的非线性项,L1为等效的不确定性总和,将在后面采用小波网络逼近处理,所以在设计中可将其视为常量。为使系统渐近稳定,应满足V˙2≤0,因此可选择如下虚拟控制函数:

代入式(8)可得:

基于磁场定向的矢量控制可以实现系统动态方程中转速和电流项的完全解耦,以达到最大的控制效率,因此可选择式(9)和(11)作为期望的参考电流。

为保证电机电流的渐近跟踪,选择如下的电流跟踪误差为新的子系统的状态变量:

对式(12)、(13)求导,分别代入式(3)、(9)和式(4)、(11),考虑到式(3)和式(4)中的参数不确定性,并采用上述处理方法可得:
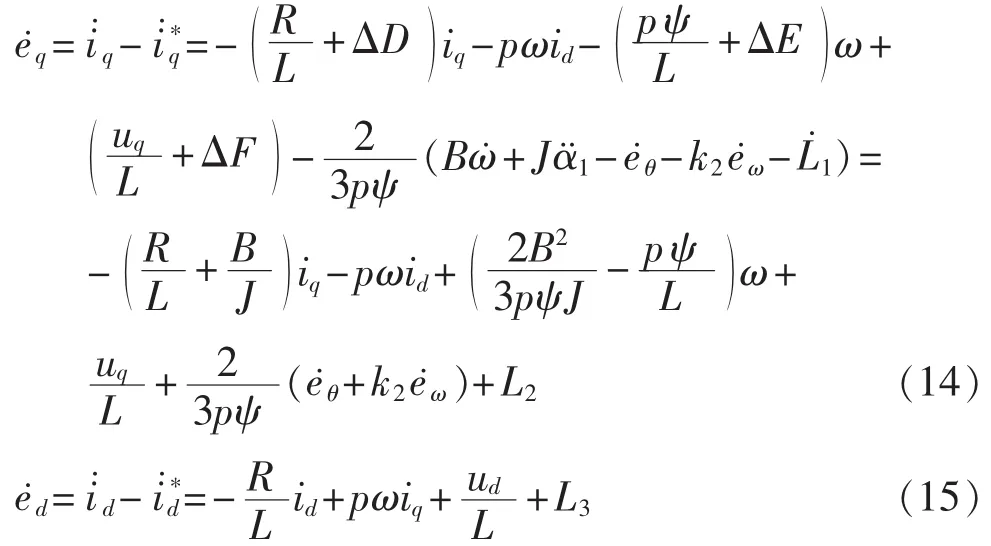
其中,ΔD、ΔE、ΔF为系统参数不确定性引起的非线性项,L2和L3为等效的不确定性总和。
为了估计不确定项 L1、L2、L3,采用结构如图 1 所示的3层递归小波神经网络对控制系统中的非线性项进行逼近。网络的输入为位置跟踪误差及其微分,输出即为不确定项的估计值和选择一阶微分的高斯小波函数 φ(x)=-xexp(-x2/2)作为隐含层神经元的作用函数。为提高网络收敛速度,采用文献[19]的方法初始化网络的初值。通过有监督的梯度下降法在线计算和更新网络的参数,可以实时调整网络的输出,使之准确跟踪不确定性非线性项的变化[20]。选择合适的参数学习率对于保证网络的全局收敛起着关键作用,具体分析证明可参考文献[21]。

图1 小波神经网络结构图Fig.1 Structure of wavelet neural network
令 E= (E1,E2,E3)为小波网络的逼近误差,则有其中L是不确定性构成的向量为其估值。对于 eθ、eω、eq、ed构成的子系统,选取如下李雅普诺夫函数:

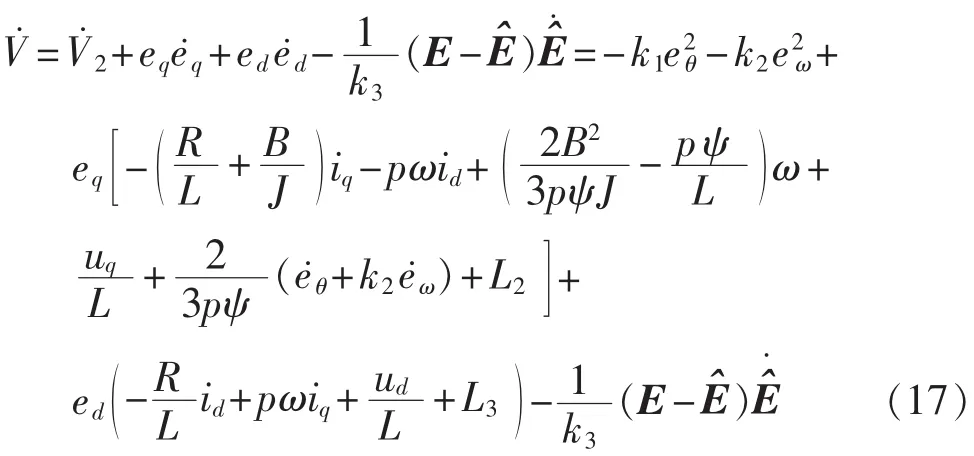
由此设计实际的控制输入为:

其中,k4、k5>0,将式(18)、(19)代入式(17)得:

设计自适应律:


图2 系统结构图Fig.2 Structure of system
3 稳定性分析

因为 V>0且V˙≤0,所以 V是有界的,根据Barbalat推论可知:

可知:对于式(1)—(4)所表示的永磁同步电机系统,通过设计式(18)、(19)、(21)的控制律及自适应律可保证如图2所示结构的控制系统的位置、电流能够渐近跟踪参考信号,实现系统的全局一致稳定。
4 仿真结果与分析
为验证所提控制策略的有效性,将经典PI控制、传统反推控制方法和基于小波网络的自适应反推控制方法进行了对比仿真实验。仿真所用电机的标称参数为:线电阻R=8.02 Ω,线电感L=16.3 mH,转子磁链ψ=0.107 Wb,极对数p=3,转动惯量J=0.375 kg·cm2,粘滞摩擦系数 B=0.000 1 N·m·s。考虑到电机的实际运行,假设参数变化为:R=16 Ω,L=16 mH,ψ =0.2 Wb,p=3,J=0.75 kg·cm2,B=0.000 5 N·m·s。反推控制器参数为:k1=50,k2=1,k3=100,k4=1 000,k5=0.02,小波网络隐含层神经元个数为6。PI控制器的位置环参数为kp1=200,ki1=2 000;速度环参数为 kp2=0.1,ki2=10;d轴电流环参数为 kp3=20,ki3=2 000;q 轴电流环参数为 kp4=100,ki4=2 000。
仿真的参考指令给定为幅值10 rad、周期2 s的正弦信号。电机初始运行条件为空载,控制器参数为电机标称参数,于0.5 s和1.5 s时分别施加0.5 N·m和-0.5 N·m的负载。3种策略的轨迹跟踪曲线和跟踪误差仿真结果如图3—5所示。其中图5为图4中区域 1、2、3、4 的放大显示。
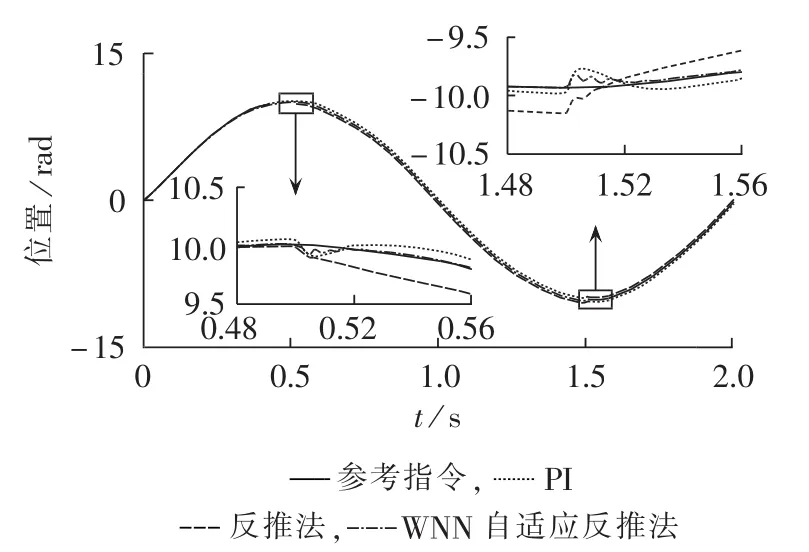
图3 3种控制策略在参数及负载变化下的位置轨迹跟踪比较Fig.3 Comparison of position tracking among three control schemes for parameter perturbation and load variation
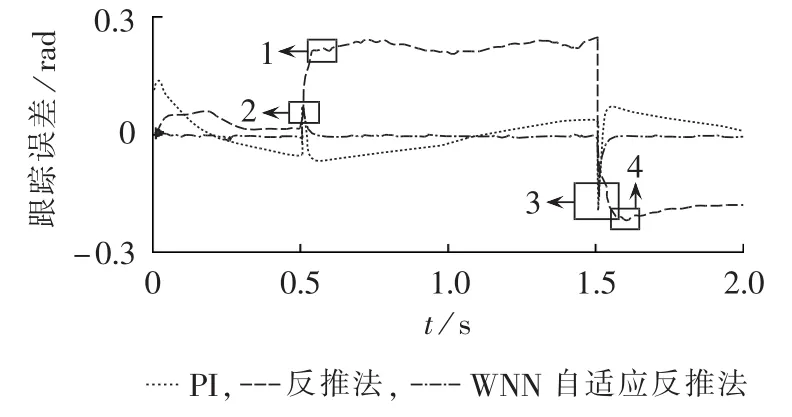
图4 3种策略跟踪误差比较Fig.4 Comparison of tracking error among three control schemes
从图中可以看出,由于电机参数的变化,PI控制器和反推控制器在电机初始空载运行阶段即存在稳态误差,而小波神经网络自适应反推控制器可以快速准确地跟踪给定轨迹且稳态误差趋于零,具有很好的动静态性能。当t=0.5 s加载时,PI控制器和反推控制器都产生了较大的轨迹波动,超调分别达到0.076 rad、0.228 rad,且跟踪误差也相应增大;而小波神经网络自适应反推控制器超调为0.067 rad且在0.1 s内即恢复稳态且误差为零。这种对比在负载变化加剧时尤为明显,t=1.5 s时,施加的负载等值反向,此时PI控制器和反推控制器的超调分别达到0.19 rad、0.22 rad,而小波神经网络自适应反推控制器超调仅为0.143 rad且仍可在0.1 s内准确跟踪给定信号。

图5 3种策略跟踪误差的超调部分的放大显示Fig.5 Detailed overshoot of tracking error for three control schemes
由上述分析可知,在存在参数不确定性及负载扰动的情况下,小波神经网络自适应反推法相对于传统反推法和PI控制器不存在稳态跟踪误差,且在负载变化时可快速回归稳态,超调量小,恢复时间短,因此其具有动静态性能好、鲁棒性强的特点。
5 结论
针对永磁同步电机位置伺服控制系统的非线性特点及其在工作中易受参数变化和负载扰动而引起控制精度不理想的问题,提出了一种基于小波神经网络的自适应反推控制策略,通过利用小波神经网络的非线性逼近能力和反推法设计保证控制稳定性的优点,解决了以往反推设计存在的控制器设计过于复杂、参数过多及部分参数不确定性影响的问题,对所有参数不确定性加以考虑并估计补偿,通过设计保证了系统位置、电流的渐近跟踪。通过与传统PI、反推控制对比,证明了所提控制方法在存在参数不确定性及负载扰动的情况下具有良好的动静态性能和很强的鲁棒性。