压电驱动一维微动平台的动力性能仿真
2013-10-16于月民闫鲁华
于月民, 闫鲁华
(黑龙江科技大学 理学院,哈尔滨 150022)
0 引言
高精度和高分辨率的精密微位移系统在近代尖端工业产品和科学研究领域内占有极其重要的地位。微动平台是微位移系统的核心,主要由微位移驱动器和导轨等部件构成。柔性铰链是一种具有特定形状的精密传动机构,仅存在弹性材料内部分子之间的内摩擦、无间隙及运动灵敏度高,作为柔性支承导轨可以达到极高的分辨率,且柔性支承导轨结构紧凑、体积小、质量轻及不需要润滑,在精密微位移工作台、微夹持和精密定位系统与微装配等应用领域得到了广泛的应用[1-6],对柔性铰链的研究也逐渐成为柔性机构研究中的一个热点。
目前,典型的一维微动平台定位机构有单平行四杆机构、双平行四杆机构和Scott-Russell位移放大机构。单平行四杆机构微动平台的输出位移存在交叉耦合。双平行四杆机构微动平台结构虽然消除了位移耦合,但是结构复杂。Scott-Russell位移放大机构微动平台虽然结构紧凑,可以实现单驱动多自由度运动,但其输入输出存在非线性[7-11]。
为此,笔者设计一种新型的一维微动平台,主要特点是采用对称的S型柔性铰链为定位机构,采用压电堆栈作为驱动器,结构简单,消除了输出位移的耦合。首先利用能量法研究S型柔性铰链的刚度特性,其次基于S型柔性铰链设计一维微动平台,最后对一维微动平台进行动力性能仿真分析。
1 S型柔性铰链的刚度特性
1.1 模型
S型柔性铰链作为传递微位移的关键部件,其刚度性能直接影响微动平台的输出定位,对S型柔性铰链进行理论计算与分析是十分必要的。图1为S型柔性铰链的几何结构示意图。铰链各部分截面形状相同,根据S型柔性铰链的变形特点,对S型柔性铰链作如下假设:(1)材料为均匀的各向同性材料;(2)材料变形为弹性小变形;(3)忽略S型柔性铰链自身重力的影响。

图1 S型柔性铰链Fig.1 S type flexure hinge
根据S型柔性铰链在一维微动平台中的受力特点,将S型柔性铰链简化为一端固定,另一端受沿x方向的力F作用的S型悬臂梁,研究其在x方向的刚度,如图2所示。

图2 S型悬臂梁Fig.2 S type cantilever
1.2 刚度特性
S型悬臂梁在力F作用下,由卡氏第二定理[9]可知,x方向上的位移为

式中:U——S型悬臂梁在力F作用下的变形能。
由线弹性理论,S型柔性铰链的刚度kx可表示为
将S型悬臂梁分成五个部分,分别计算各部分的变形能,可得S型悬臂梁在x方向上的位移为

式中:E——材料的弹性模量;
A——横截面面积;
I——横截面的惯性矩。
由卡氏定理可得S型柔性铰链的刚度计算公式:
基于S型柔性铰链在一维微动平台中的具体应用,确定S型柔性铰链的具体尺寸:长度l=10 mm,宽度b=5 mm,厚度d=0.4 mm,拐角长度a=4 mm。材料属性:弹性模量E=210 GPa,泊松比μ=0.3,密度 ρ=7 200 kg/m3,许用应力[σ]=340 MPa。

2 平台设计
一维微动平台结构如图3所示。结构尺寸187 mm×150 mm×25 mm,其特点是四个S型柔性铰链的二端分别与可动平台和固定外框固结,柔性铰链对称放置,可以消除输出位移耦合。压电堆栈驱动器可放置于微动平台的中间卡槽内,控制压电堆栈驱动器的输入电压,可获得需要的驱动力。在驱动力作用下,引起S型柔性铰链发生变形,实现一维微动平台的位移输出,压电堆栈驱动器性能参数:自由位移 δf=60 μm,长度 l=71 mm,电容 C=71 nF,刚度 ks=120 N/μm,共振频率 f=27 kHz。
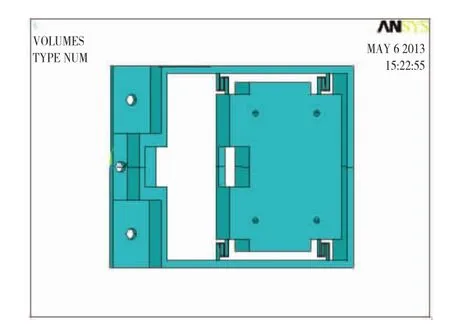
图3 微动平台Fig.3 Micro-motion stage
2.1 固有频率
微动平台不仅应具有足够的输出位移,还需要具备快速响应和抗干扰能力,因此需要对微动平台的动力学性能进行分析。根据伪刚体模型理论,将微动平台机构的四个S型柔性铰链简化为弹簧,微动平台机构的动力学模型见图4所示。

图4 微动平台动力学模型Fig.4 Dynamics model
在力F驱动下,微位移机构产生的位移为x,则工作台的平动动能:

微动平台的等效质量me为

系统的势能:

微动平台的等效刚度Ke为
可得固有频率:

2.2 动力学分析
压电堆栈驱动器驱动一维微动平台可简化图5所示的弹簧、质量和阻尼单自由度系统[12]。c为阻尼系数,k为压电堆栈驱动器的刚度。

图5 压电驱动微动平台模型Fig.5 Model of micro-motion stage actuated by PZT
一维微动平台的动力学方程为

在阶跃位移输入x0条件下,输出x:

式中:ω0——单自由度系统的固有角频率;
ξ——阻尼比。
当系统达到稳定后,一维微动平台的输出位移为

由式(4)可知,该微动平台的稳定输出位移与压电堆栈驱动器输入位移呈线性关系,表明基于压电堆栈驱动和S型柔性铰链为定位机构设计的一维微动平台可以获得稳定位移输出。
3 一维微动平台仿真分析
3.1 静态仿真
根据微动平台的实际尺寸建立微动平台的有限元模型,采用Solid45单元,对模型进行网格划分,生成的网格划分模型,如图6所示。对一维微动平台施加7.2 kN的驱动力,经ANSYS10.0后处理得到的位移云图,如图7所示。由图7位移云图可知,微动平台x向输出的最大位移为46.8 μm。

图6 网格划分模型Fig.6 Meshing
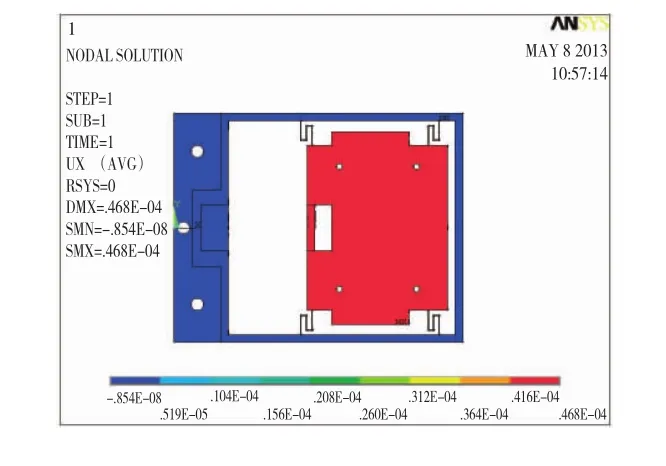
图7 x轴方向位移云图Fig.7 Displacement of x
经ANSYS10.0后处理得应力云图,如图8所示。微动平台的最大应力为37MPa,远小于材料的许用应力340 MPa,所设计的一维微动平台满足强度设计要求。

图8 应力云图Fig.8 Principal stress
为研究一维微动平台的输出位移和最大应力与驱动力之间的关系,通过ANSYS10.0有限元分析软件分析在1.2、2.4、3.6、4.8和6 kN 驱动载荷下,微动平台的输出位移和最大应力。利用Origin软件绘出不同驱动载荷下,微动平台的输出位移曲线,如图9所示。最大等效应力曲线如图10所示。
从输出位移和最大应力随载荷变化的图10可知:在不超过许用应力的范围下,一维微动平台的x向输出位移和最大等效应力与驱动载荷成线性关系,输入与输出呈线性关系与动力学分析的结论一致。

图9 x轴方向位移与载荷的关系Fig.9 x displacement vs load

图10 等效应力与载荷的关系Fig.10 Mises stress and load
3.2 动态仿真
一维微动平台在工作中应避免共振现象的发生,以保证结构不会破坏。通过模态分析可以得到微动平台在工作中可能发生的行为,分析S型柔性铰链的位置和质量分布是否合理。对微动平台进行模态分析,前六阶模态云图如图11所示。一维微动平台的各阶固有频率都远小于压电驱动器的共振频率,远离共振点,微动平台处于稳定的工作状态。

图11 模态Fig.11 Modes
4 结束语
利用能量法的卡氏定理推导出S型柔性铰链的x向刚度计算公式。在此基础上设计了一维微动平台,推导出该平台固有频率计算公式。利用 ANSYS10.0有限元分析软件对压电堆栈驱动一维微动平台进行了动力学分析。结果表明:微动平台的最大应力远小于材料的许用应力,满足强度设计要求;微动平台的各阶固有频率都远小于压电驱动器的共振频率,远离共振点,微动平台处于稳定的工作状态。微动平台的x向输出位移和最大等效应力与驱动载荷成正比。在实际应用中,可根据位移与载荷的关系,控制压电堆栈的驱动电压以输出相应的驱动力,获得需要的微动平台输出位移。
[1]郭百巍,汪家道,及开元,等.基于柔性铰链的微操作执行器的设计和分析[J].机械设计与研究,2003,19(4):28-30.
[2]陈时锦,杨元华,孙西芝,等.基于柔性铰链的微位移工作台性能分析与优化设计[J].机械设计,2004,21(7):46-48.
[3]杨国兴,张宪民,王 华.基于有限元方法的柔性铰链式微夹持器优化设计[J].中国机械工程,2006,17(10):1074-1078.
[4]YU Y M,JI X SH.Design and analysis of a micro-gripper based on smart materials[J].Applied Mechanics and Material,2012,223(4):983-987.
[5]PARK R S,YANG S H.A mathematical approach for analyzing ultra precision positioning system with compliant mechanism[J].Journal of Materials Processing Technology,2005,164(5):1584-1589.
[6]TIAN Y L,ZHANG D W.Development and dynamic modeling of a flexure-based scott-russell mechanism for nano-manipulation [J].Mechanical Systems and Signal,2009,23(6):957 -978.
[7]YONG Y K,APHALE S S.Design identification and control of a flexure-based XY stage for fast nano-scale positioning[J].IEEE Transactions on Nanotechnology,2009,8(4):46-54.
[8]MA H W,YAO S M,WANG L Q,et al.Analysis of the displacement Amplification Ratio of Bridge Type Flexure Hinge[J].Sensors and Actuators A,2006,132(4):730-736.
[9]王建林,周秀珍.压电驱动三维纳米微位移系统研究[J].压电与声光,2001,23(6):439-442.
[10]陶惠峰.超精密微位移系统研究[D].杭州:浙江大学,2003.
[11]WU Y,ZHOU Z.Design calculations for flexure hinges[J].Review of Scientific Instruments,2002,73(8):3101 -3106.
[12]王生怀,陈育荣,王淑珍,等.三维精密位移系统的设计[J].光学精密工程,2010,18(1):175-182.
[13]王 南,高 鹏,崔国华,等.两种并联机构的静刚度及有限元分析[J].河北工程大学学报:自然科学版,2013,30(1):87-90.
