多传感器数据融合技术概述*
2013-10-16张延龙王俊勇
张延龙 王俊勇
(海军兵种指挥学院 广州 510430)
1 引言
数据融合也称为信息融合,是将来自多个传感器或多源的信息进行综合处理,从而得出更为全面、准确和可靠的结论[1]。数据融合出现于20世纪70年代,源于当时军事领域的C3I系统的需要,称为多源相关、多传感器混合数据融合,并于20世纪80年代建立其技术[2]。美国是数据融合技术起步最早的国家,在随后的十几年时间里各国的研究开始逐步展开,并相继取得了一些具有重要影响的研究成果。和国外相比,我国在数据融合领域的研究起步较晚。海湾战争结束以后,数据融合技术引起国内有关单位和专家的高度重视。一些高校和科研院所相继对数据融合的理论、系统框架和融合算法展开了大量研究,但基本上处于理论研究的层次,在工程化、实用化方面尚未取得有成效的突破,许多关键技术问题尚待解决[3]。
2 多传感器数据融合的基本原理
多传感器数据融合是人类和其他生物系统中普遍存在的一种基本功能。人类本能地具有将身体上的各种功能器官所探测到的信息与先验知识进行融合的能力,以便对周围的环境和正在发生的事件作出估计。多传感器数据融合的基本原理就像人脑综合处理信息的过程一样,它充分利用多个传感器资源,通过对这些传感器及其获得信息的合理支配和使用,把其在时间或空间上的冗余或互补信息依据某种准则来进行综合,以获得被测对象的一致性解释或描述,使该系统由此而获得比它的各组成部分的子集所构成的系统具备更优越的性能[4~5]。具体而言,多传感器数据融合基本原理如下[6~8]:
1)多个不同类型的传感器获取目标的数据;
2)对输出数据进行特征提取,从而获得特征矢量;
3)对特征矢量进行模式识别,完成各传感器关于目标的属性说明;
4)将各传感器关于目标的属性说明数据按同一目标进行分组,即关联;
5)利用融合算法将每一目标各传感器数据进行合成,得到该目标的一致性解释与描述[7]。多传感器数据融合的一般过程如图1所示。
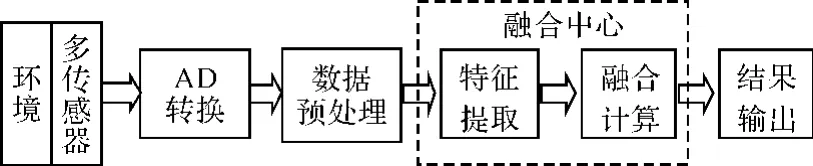
图1 多传感器数据融合的一般过程
由于被测对象多半为具有不同特征的非电量,如压力、温度、色彩和灰度等,因此首先要将它们转换成电信号,其中多传感器的功能是实现信号检测。
3 多传感器数据融合的主要特点
在各种系统中,靠单一的传感器不能满足对目标、环境的识别和控制的要求。若对不同传感器采集的数据单独、孤立地进行加工,不仅会导致数据处理工作量的剧增,而且割断了各传感器数据之间的有机联系,丢失数据有机组合蕴涵的特征,造成数据资源的浪费。因此,要对多传感器的数据进行综合处理即数据融合,从而得出更为准确、可靠的结论,使系统圆满地完成各种操作任务。归纳起来,多传感器数据融合的主要特点有[9]:
1)提高了对环境描述的能力;
2)提高了系统的分辨能力和运行效率;
3)提高了系统的可靠性和容错能力;
4)在时间上和空间上扩展了观测的范围;
5)增强了数据的可信度并降低了系统成本。
4 多传感器数据融合的基本结构
由于数据的多样化,所以需要按照数据的类型和采集方式或工程需求等特点,根据具体问题及特定对象建立自己的融合层次。针对其在军事上的应用将数据融合划分为检测层、位置层、属性层、态势评估和威胁估计;根据数据融合功能的抽象层次和数据流通方式及传输形式,把数据融合分为高层次和低层次处理等。可见,数据融合层次的划分没有统一标准[10~13],一般来说目标属性级融合有三种基本结构[14]:数据层融合、特征层融合和决策层融合结构见图2。
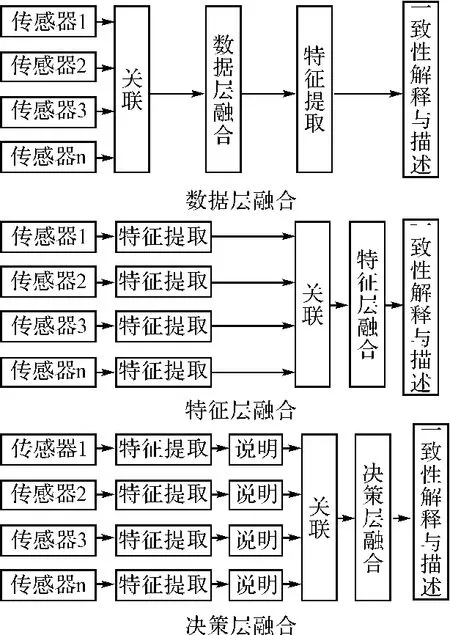
图2 数据融合的层次
1)数据层融合——这是最低层次的融合。它首先将全部传感器的观测数据直接融合,然后对融合的数据进行特征提取和特征说明,并进行判断识别。这便要求传感器是同质的,若多个传感器是异质的,那么数据只能在特征层或决策层进行融合。其优点是能保持尽可能多的现场数据,提供其他融合层次所不能提供的细微信息。
2)特征层融合——这是中间层次的融合。在这种方法中,每个传感器观测目标,并从观测数据中提取有代表性的特征,获得特征矢量,而后融合这些特征矢量,并做出基于联合特征矢量的属性说明。特征层融合是从传感器提供的原始数据中进行特征提取,因此,在融合前进现了一定的数据压缩,有利于实时处理,但由于数据的丢失使其准确性有所下降。
3)决策层融合——这是最高层次的融合。在这种方法中,每个传感器观测目标,并将采集的信息进行特征提取,产生特征矢量,完成关于目标的说明,然后对各自传感器的说明结果进行融合,得到目标的一致性解释与描述。这种融合方式具有好的容错性和实时性,可以应用于异质传感器,而且在一个或多个传感器失效时也能正常工作,其缺点是预处理代价高。由于对传感器的数据进行了浓缩,这种方法产生的结果相对而言最不准确,但它对通信带宽的要求最低。
上述三个层次的数据融合都各有其特点,在具体的应用中应根据融合的目的和条件选用。
5 多传感器数据融合的技术方法
数据融合的不同层次对应不同的算法,传统算法为数据融合技术奠定了不可或缺的理论基础,但近年来出现的一些新的基于统计推断、人工智能以及信息论等新方法,正成为推动数据融合技术向前发展的重要力量[15]。下面列举了常用的多传感器数据融合的一般算法,并分别对应于从低到高的融合层次[16]。数据融合的主要技术和方法见图3。
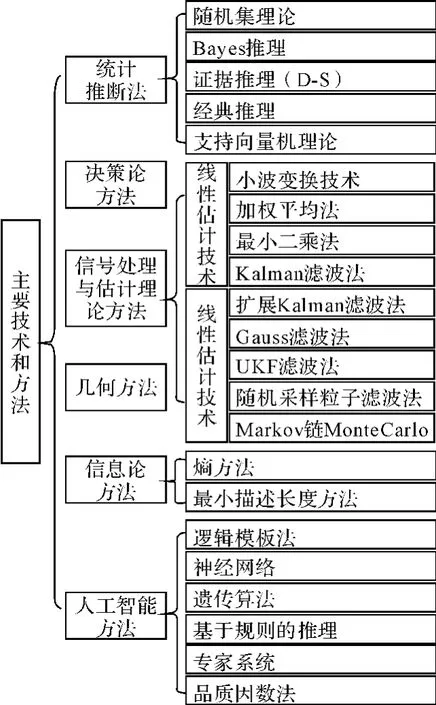
图3 数据融合的主要技术和方法
1)加权平均法——是一种最简单和直观的数据级融合方法,即将多个传感器提供的冗余信息进行加权平均后作为融合值。该方法能实时处理动态的原始传感器读数,但调整和设定权系数的工作量很大,且具有一定的主观性[17]。
2)卡尔曼滤波法——主要用于融合低层次多传感器实时动态冗余数据。当系统噪声和传感器噪声可以用高斯白噪声来建模,则卡尔曼滤波器能提供唯一的统计意义上的最优融合值。并且,它的递归本质保证了在滤波过程不需要大量存储空间,可以实时处理。
3)贝叶斯估计法——是融合静态环境中多传感器低层数据的一种常用方法,其信息描述为概率分布,适用于具有可加高斯噪声的不确定性信息[18]。
4)统计决策理论——利用统计决策理论提出了一个通用的多传感器冗余信息两步融合算法,即先将多传感器数据经过一个鲁棒假设测试,以验证其一致性,再通过测试的数据,利用一组鲁棒最大最小决策规则进行融合[19]。
5)证据理论法——证据理论是贝叶斯方法的推广,但比贝叶斯法具有更多优点,贝叶斯方法需要先验概率,而运用证据理论法可以巧妙的解决这一问题,它是一种不确定情况下进行推理的强有力方法[20]。
6)模糊逻辑——比较适合于在高层次上的应用[21]。但是,逻辑推理本身还不够成熟和系统化,此外,由于逻辑推理对信息的描述存在很大的主观因素,所以,信息的表示和处理缺乏客观性。
7)神经网络——具有很强的容错以及自学习、自组织、自适应能力,在多传感器数据融合中具有很多的应用领域[25]。
8)产生式规则——用符号表示目标特征和传感器信息间的联系,用与规则相联系的置信因子表示它的不确定性,在同一个逻辑推理过程中两个或多个规则形成一个联合规则时可以产生融合。
常用的数据融合方法特性比较如下表所示。通常使用的方法依具体的应用而定。并且由于各种方法之间的互补性,实际上常将两种或两种以上的方法组合进行多传感器数据融合。
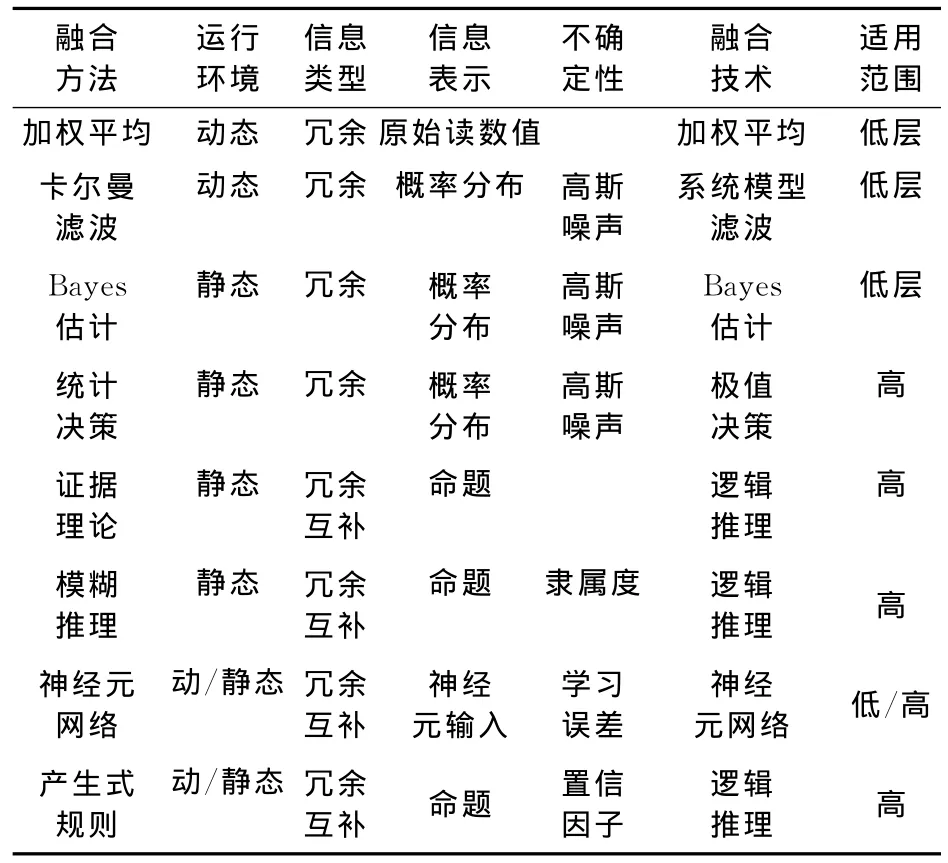
表1 常用的数据融合方法比较
6 多传感器数据融合技术的应用
随着多传感器数据融合技术的发展,应用的领域也在不断扩大。主要包括军事、工业控制、智能检测、机器人、图像分析、目标检测与跟踪、自动识别等领域。
1)军事应用——数据融合技术起源于军事领域,数据融合在军事上应用最早、范围最广,涉及战术或战略上的检测、指挥、控制、通信和情报任务的各个方面[1]。主要的应用是进行目标的探测、跟踪和识别,包括C31系统、自动识别武器、自主式运载制导、遥感、战场监视和自动威胁识别系统等。
2)工业控制——复杂工业控过程控制是数据融合应用的一个重要领域。包括故障诊断和反馈控制。目前,故障诊断技术已在核反应堆和石油平台监视等系统中得到应用。
3)机器人——目前,主要应用在移动机器人和遥控操作机器人上,因为这些机器人工作在动态、不确定与非结构化的环境中,这些高度不确定的环境要求机器人具有高度的自治能力和对环境的感知能力,而多传感器数据融合技术正是提高机器人系统感知能力的有效方法;机器人学界提出向非结构化环境进军,其核心的关键之一就是多传感器系统和数据融合。
4)遥感技术——多传感器融合在遥感领域中的应用,主要是通过高空间分辨力全色图像和低光谱分辨力图像的融合,得到高空间分辨力和高光谱分辨力的图像,融合多波段和多时段的遥感图像来提高分类的准确性。
5)交通管理系统——数据融合技术可应用于地面车辆定位、车辆跟踪、车辆导航以及空中交通管制系统等[2~3]。
7 多传感器数据融合技术的展望
数据融合系统是一个具有强烈不确定性的复杂大系统,处理方法受到现有理论、技术、设备的限制,是一门新发展的学科,很多理论还不健全,但随着传感器技术、数据处理技术、计算机技术、网络通信技术、人工智能技术、并行计算软件和硬件技术等的发展,它将不断完善。它的发展方向大致有四个[6~7,12]:
1)基础理论研究。研究建立统一的数据融合理论,主要包括多平台、多传感器信息的获取、特征提取、分类、数据融合过程的一般模式,功能结构的建立,优化设计以及系统的评估标准。
2)算法和模型研究。包括关联处理、融合处理和系统模拟、多传感器优化组合、各种先进技术在数据融合系统中的应用等。
3)推理系统研究。包括在数据融合系统中应用的数据库、知识库、确定和不确定信息的推理机构、融合规则库等研究。
4)应用研究。从工程实现角度来讲,我们关心的是信息的获取、融合、传感器管理和控制一体化系统的研制,而不是单纯的融合算法研究。
8 结语
数据融合不是一门单一的技术,而是一门跨学科的综合理论和方法,尚处在不断的变化和发展过程中。随着研究者的不断努力,不久的将来,数据融合的基础理论、兼有稳健性和准确性的融合算法都将得以完善和实现,多传感器数据融合系统将在更多的行业领域得到实际应用。
[1]何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2000:1-12.
[2]祝宏,曾祥进.多传感器信息融合研究综述[J].计算机与数字工程,2007,35(12):46-48.
[3]周芳,韩立岩.多传感器信息融合技术综述[J].遥测遥控,2006,27(3):1-7.
[4]马平,吕锋,杜海莲,等.多传感器信息融合基本原理及应用[J].控制工程,2006,13(1):48-51.
[5]康耀红.数据融合理论与应用[M].西安:西安电子科技大学出版社,1997,1.
[6]Waltz E,L ilnas J.Multisensor data fusion[M].Boston:A retch House,2000:9-17.
[7]Sasiadek J Z.Sensor fusion[J].Annual Reviews in Contr-ol,2002,26(26):203-228.
[8]严怀成,黄心汉,王敏多传感器数据融合技术及其应[J]传感器技术,2005.24(10):1-4.
[9]张菊秀.多传感器信息融合技术和发展[J]电子世界,2005:46-7.
[10]王璇,李春升.多传感器信息融合技术[J].北京航空航天大学学报,1994,20(4):402-406.
[11]王军,苏剑波,席裕庚.多传感器融合综述[J].数据采集与处理,2004,19(1):72-77.
[12]HALLD D L,L linas J.An introduction to multi-sensor data fusion[C].Proceeding of the IEEE,1997,85(1):6-23.
[13]潘泉,于昕,程咏梅.信息融合理论的基本方法与进展[J].自动化学报,2003,29(4):599-615.
[14]熊凌.张凯.数据融合及其应用[J].湖北工业大学学报,2005,20(3):145-147.
[15]王耀南.李树涛.多传感器信息融合及其应用综述[J].控制与决策,2001,16(5):518-522.
[16]王凤朝,黄树采,韩朝超.多传感器信息融合及其新技术研究[J]航空计算技术,2009,39(1),102-105.
[17]张雨,温熙森.设备故障信息融合问题的思考[J].长沙交通学院学报,1995,6(4).
[18]H F Durant-Whyte.Consistent integration and propaga-tion of disparate sensor observations[J].Int.J.Robot,res,1987,6(3):2-24.
[19]Chung A C S,Shen H C.Entropy.based Markov chains for muhisensor fusion[J].Joumal ofIntelligent and Rob-otic Systerns:Theory and Applications,2000,29(2):161-189.
[20]R MckendMl,M Mintz.Robust fusion of location infor-mation[A].Proc.IEEE Int.Conf.Robotics and Automat[C].1988:1239-1244.
[21]李凡.人工智能中的不确定性[M].万象出版社,1998:102-178.
[22]李婷,吴业福,涂平晖,等.关系数据库与XML数据融合的应用研究[J].计算机与数字工程,2008,36(2).
[23]张雯娟,朱响斌.基于移动代理的无线传感器网络簇内融合算法[J].计算机与数字工程,2010,38(3).
[24]张靓,袁野,王玫.基于小波变换的传感网簇内数据融合方案[J].计算机与数字工程,2012,40(7).
[25]L A Zadeh,Fuzzy sets[J].Inform.Contr,1965,8:338-353.
[26]Murphy R R.Sensor and information fusion for impro-ved visionbased vehicle guidance[J].IEEE Expert,2003,13(6):49-56.
