基于DSP2808的永磁无刷直流电动机调速控制的研究
2013-10-15张向文周俊赵
赵 皋,张向文,黄 友,周俊赵
(桂林电子科技大学 电子工程与自动化学院, 桂林 541004)
0 引言
三相永磁无刷直流电机转子采用的是永磁材料制成的永久磁钢。随着数字信号处理器DSP出现,使得三相永磁无刷直流电动机的换相控制比较容易[1~3]。永磁体的转子结构简单、运行可靠, 定子多相绕组,逆变器和霍尔位置传感器组成电子换向器。霍尔位置检测器相当于普通有刷直流电动机的电刷, 逆变器的输出受霍尔位置传感器的控制,转子位置决定了绕组电流的相位和绕组磁势在空间的分布, 改变转子的相对位置, 就可以改变绕组中电流对电势的相位差和电枢反应磁势对磁极的相对位置[4,5]。
本文设计使用的是三相桥的上下桥单桥PWM占空比脉宽调制调速方法,相比较传统三相桥上下桥同步PWM占空比脉宽调制调速方法安全系数要高一些,调节过程的复杂度要简化一半,减少了每路上下桥中单桥IGBT的开关次数,降低了IGBT的发热量,使得IGBT的工作效率得以提高。
1 三相永磁无刷直流电机的控制换相控制原理硬件设计
三相永磁无刷直流电机的控制硬件原理框图如图1所示。三相永磁无刷直流电机的控制使用的是换相控制,需要用到霍尔位置传感器来检测转子所转到的位置,霍尔位置传感器输出的位置信号送入DSP2808,DSP2808根据此时的位置编码查表找到相对应的逆变桥6路上下桥开关管的导通顺序。输出PWM波驱动光耦隔离板,经光耦隔离后将5V的PWM波信号转变为13.7V的IGBT门驱动信号,从而使得三相永磁无刷直流电机的内阻与电源形成回路,电流流过定子产生磁场使得永磁体转子在定子磁场中受力的作用符合安培全电流定律。
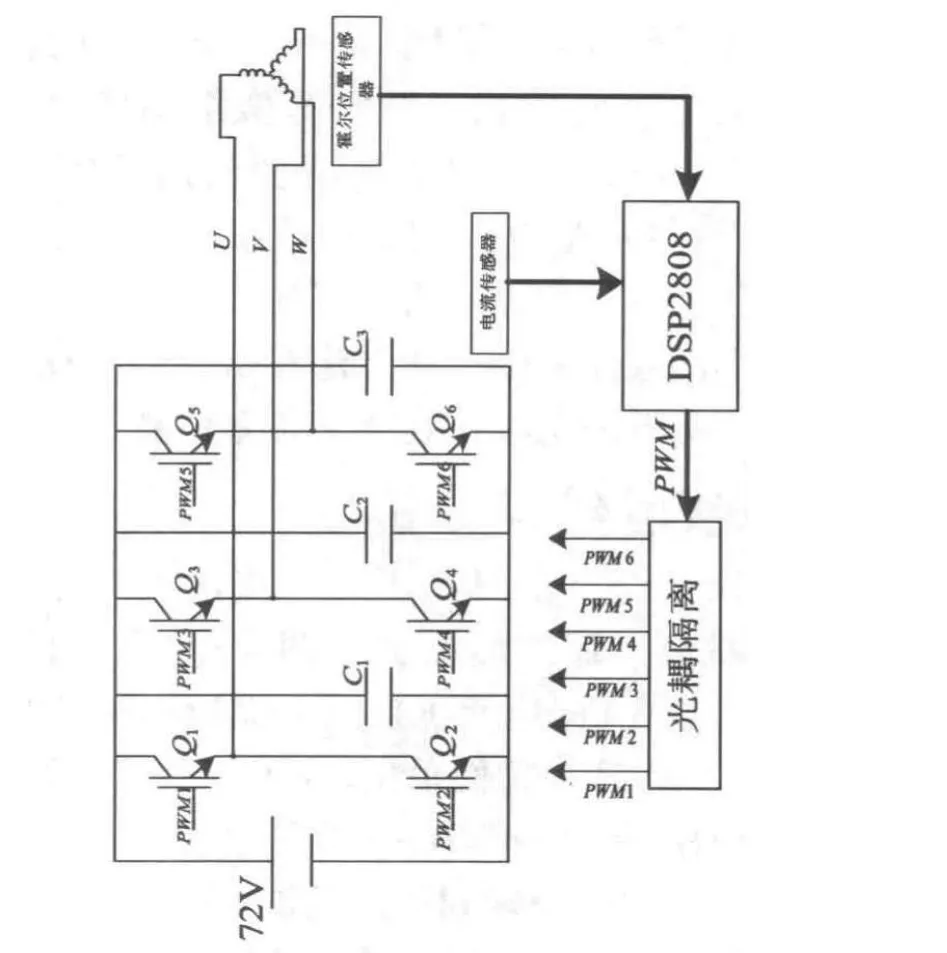
图1 三相BLDC电机控制硬件原理框图
在光耦隔离板上设计使用的是多路输出的开关电源,输入为蓄电池72V直流电压,输出为±15V、±12V、+5V。开关电源采用的核心是UC3844,这是一种高性能电流型PWM控制器,利用其输出控制MOSFET的通断,MOSFET采用的型号IRFP840,这样UC3844就可以控制变压器原边的输入电流大小,从而得到所需副边电压为光耦及IGBT驱动门开关供电。如图2所示。
DSP2808输出的PWM信号经光耦芯片A316J隔离后输出13.7V的IGBT门驱动信号给逆变桥,如图3所示为光耦A316J的外围电路原理图 。

图3 光耦A316J的外围电路
Idc信号对应电流传感器采样逆变桥母线过电流信号,电流传感器采样信号经放大器LMS34D反馈回芯片DSP2808,如图4所示此电路为AD采样电路。
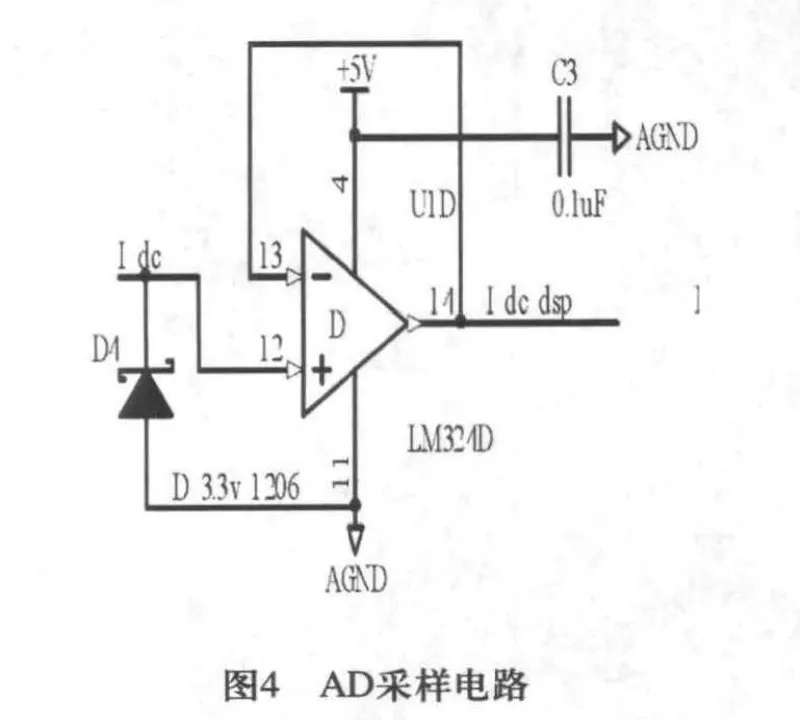
图4 AD采样电路
2 软件系统设计
三相永磁无刷直流电机换相控制系统的软件设计遵循三相六状态,根据三相六状态表对三相永磁无刷直流电机进行换相。由于使用的霍尔位置传感器的相位差为120 角,所以根据实际测量转子的位置列出如表1所示的三相六状态表。
主程序首先需要对硬件和变量进行初始化,完成各个模块的配置,进入循环等待中断的到来,中断子程序到来时,就响应中断并执行中断,执行完毕清中断返回主程序。在中断程序中设置了霍尔位置传感器信号采样滤波处理环节,防止电磁干扰,调节PWM的占空比及PWM输出频率也必须在主程序里面配置完成。PWM的输出频率必须和霍尔位置传感器采集位置信号频率相匹配,避免转子位置判断不准确。系统主程序流程图如图5所示,中断程序流程图如图6所示。
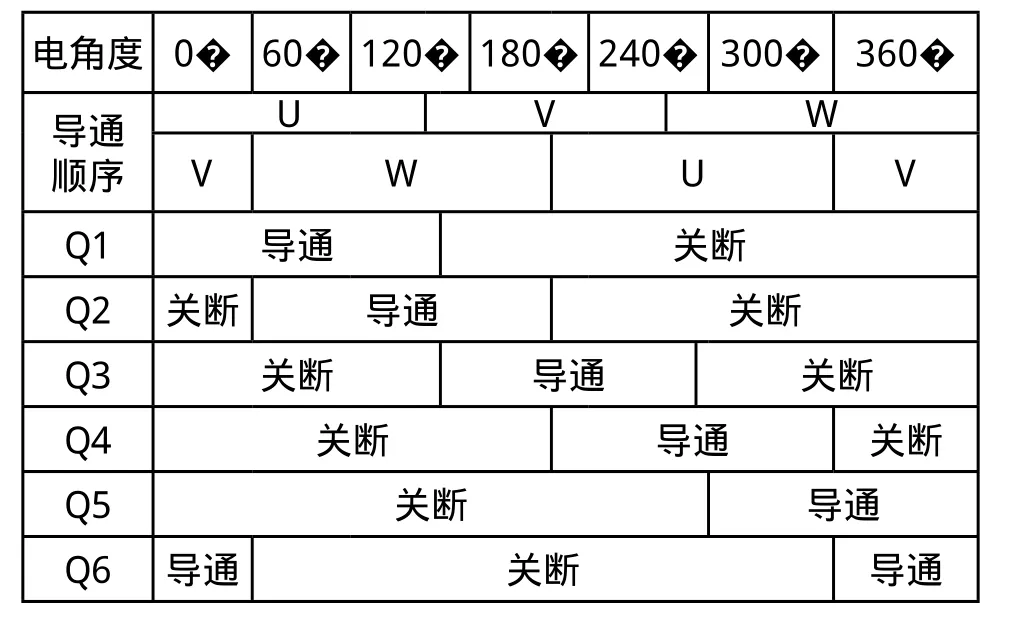
表1 三相六状态表
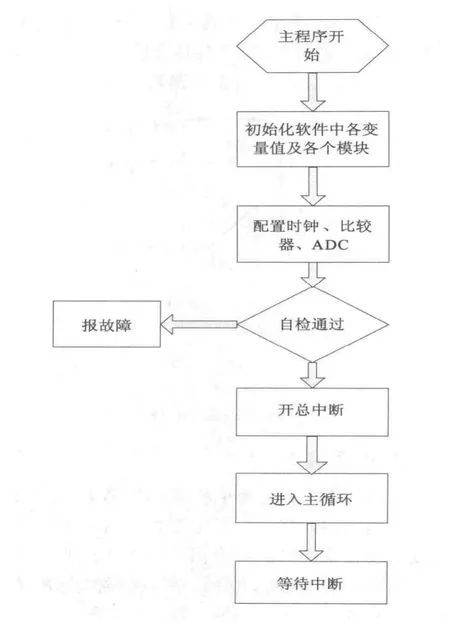
图5 主程序流程图
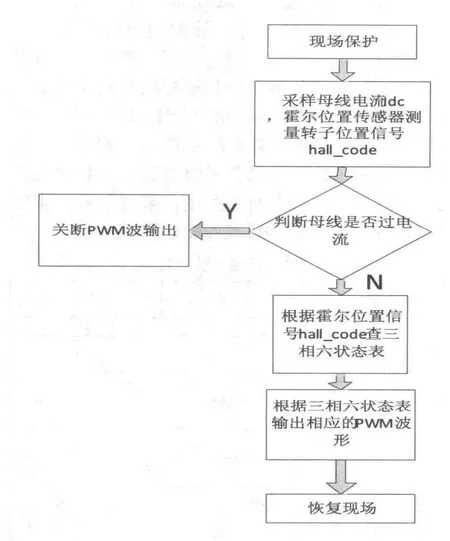
图6 中断程序流程图
3 实验
硬件实物连接图如图7所示,图8为磷酸铁锂电池组电压72V,其与逆变器组成逆变电路。图7中电机为额定电流76A、额定电压72V、额定功率5KW、额定转速2800r/m in的永磁无刷直流电动机,逆变器IGBT型号为MMG200DR060B,参数为600V-200A,电容为三个400V-2200u f并联组成起缓冲作用。

图7 电机连接实物图
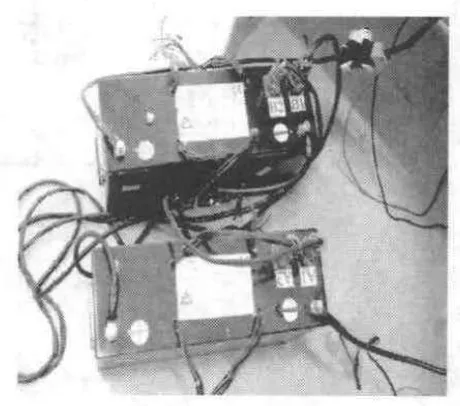
图8 磷酸铁锂电池组
实物连接后DSP2808运行输出的PWM波形为如图9所示,达到了预期波形要求。
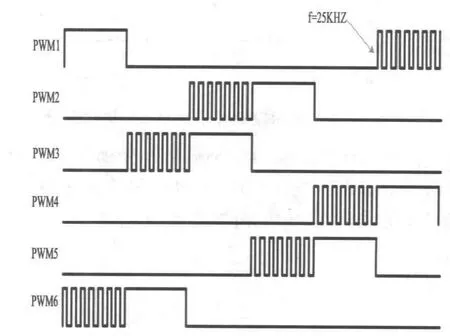
图9 三相六状态所对应的六路PWM波形
在一种状态的情况下,保持一路PWM为高电平状态另一路PWM为可调占空比的PWM波。这样就只通过调节一路PWM的占空比就能达到调速的目的。PWM波调速的占空比大小通过按键增加,调速的PWM频率为25KHZ,此频率可以保证调节小量的占空比就使得IGBT的门限电压达到5V开始开通状态的要求。占空比逐步增大使得开通IGBT电压也在逐步增加,相对的桥臂电流也在增加,流过电机内部定子星形接法的电机内阻产生磁动势增大,而电机的磁阻不变,磁通量增大,永磁体转子在磁通量逐步增强的磁场中受到的力矩就增大,从而转速增加,因此达到了调速的目的。
实物实验时电机转速为1500r/m in时改变不同的输入功率相对应的输出功率曲线如图10所示,转矩及直流母线电压与电流曲线如图11所示。
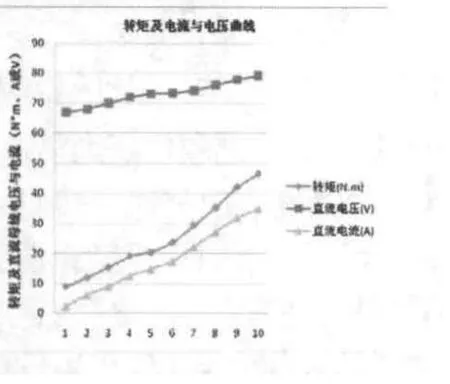
图11 转矩及直流母线电压与电流曲线
由图10和图11可以看出随着输入功率及转矩的增大,输出功率逐渐增大到额定功率5KW。
4 结论
本文设计了一种基于DSP2808的永磁无刷直流电动机换相控制系统,换相方式是使用霍尔位置传感器依据三相六状态表来换相,调速方式为上下桥单桥PWM波占空比调速,具有过电流关闭PWM波输出功能,最终结果达到了实验设计目的。在实际测试过程中出现了电磁干扰问题,电磁干扰会影响霍尔传感器的位置信号的测量精度,霍尔传感器的位置信号输出采用五心屏蔽线防止电磁干扰,在程序中需要对电磁干扰进行滤波处理以保证DSP2808输出正确的PWM波形。
[1] 严岚,唐益民,贺益康.基于DSP的永磁无刷直流电机弱磁控制系统[J].中小型电机.2003,30(6):72-78.
[2] 尹泉,余高明,万淑芸.基于DSP的永磁无刷直流伺服电机全数字控制系统[J].电力电子技术.2001,35(3):51-58.
[3] 陈璟华,汪锐,李日隆.基于TMS320C240 芯片的永磁无刷直流电机控制器[J].中小型电机.2000,27(6):34-36.
[4] 胡文静,吴彦平.稀土永磁无刷直流电动机电枢反应的分析[J].微电机.2002,35(2):12-15.
[5] 鲍晓华,刘根,张敬华.永磁无刷直流电动机运行特性的研究[J].微电机.2002,35(2):7-9.
