FANUC串联控制功能的应用及调试
2013-10-11青海第二机床制造有限责任公司西宁810021车永贵
青海第二机床制造有限责任公司 (西宁 810021) 车永贵
FANUC串联控制(Tandem Control)是指在驱动一个大的工作台时仅仅依赖一台电动机得不到足够转矩的情况下,可以用2台电动机使1个轴运行。主控轴只用来定位,从控轴只用来产生转矩。通过这一功能,可以得到2倍的转矩。
我公司为某上市公司开发了一台大型数控花键轴铣床,使用了FANUC串联控制(Tandem Control)功能。该机床采用滚铣法加工各种齿形的直、斜齿花键零件及直、斜齿圆柱连轴齿轮,并可以加工锥度花键及台阶齿轮。
机床数控系统采用FANUC 31i数控系统,共由五个伺服轴、一个主轴组成:X轴(刀具径向进给运动)、Z轴(刀具沿工件轴向进给运动)、C轴(工件旋转运动)、Y轴(刀具串刀运动)、A轴(铣刀的角度调整)、主轴(刀具旋转轴)。
由于机床最大加工直径为500mm,最大加工长度为1200mm,加工工件本身很重,需要较大的转矩来带动刀具轴向的进给移动。本机床溜板是带动铣头实现刀具轴向进给的执行部件,也就是Z轴。Z轴的运动由双伺服电动机驱动,通过固定在溜板上的两个减速箱输入,经两个齿轮输出,再经固定在机床床身上的齿条带动溜板移动,实现Z轴的进给及快速移动。这就是运用了FANUC串联控制(Tandem Control)功能。
1.Tandem 控制的原理
串联控制中,NC控制单元是把串联控制作为一个轴来处理,但是,对于伺服参数管理和伺服报警监视,把串联控制作为两个轴来处理。该功能的原理如图1所示,主动轴用于定位,从动轴只提供力矩,没有位置控制和速度控制。

图1
2.Tandem 控制在本机床中的应用
本机Z轴由两个αiF22/3000的伺服电动机带动。如图2所示,采用双伺服电动机,通过数控系统控制张力,使双齿轮在一齿条两反齿面啮合,实现无间隙运动。
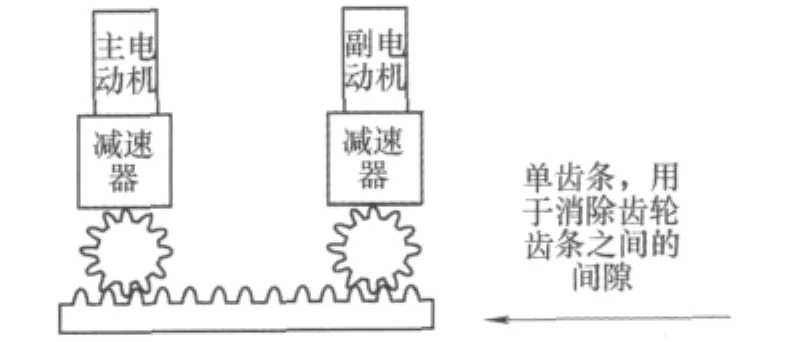
图2
3.Tandem 控制的功能调试
本机床的Z轴控制为半闭环控制,主/从电动机的联接与普通电动机联接相同。
(1)电动机的基本设定 主/从电动机基本设定方法与普通电动机基本设定一样,本机床共有五个伺服轴,而Z轴两个电动机使用Tandem 控制,使用一个两轴的放大器(SVM2-80/80I),使本机床实际伺服轴控制变成了六轴,本文只针对Tandem 控制的Z轴伺服轴做调试说明,其余各轴省略不再讲述。Tandem 控制要求主控轴和从控轴的伺服轴号的值(参数NO.1023)为相差一的奇数和偶数,需要在主控轴中设定一个较小的值。那么需要设定以下参数(见附表)。

参数表
主控轴和从控轴的轴名称可以相同也可以不同,本机床中均设定为Z,但在参数NO.3131中设定了下标,以示区别。
Z1电动机、Z2电动机到齿条的降速比均为1∶50,电动机每转的进给量为5.28mm,设定参数NO.1821为5280;NO.2084为33;NO.2085为6250。注意主/从电动机的速度增益必须设置相同的数值;主/从电动机在非Tandem的状态下,只允许主/从电动机进行微动,禁止任意一个电动机拖动另外一个电动机进行大角度的转动。
(2)Tandem控制的基本设定 首先再次查看参数NO.2022,确认主/从电动机的正转出力是否一致,从电动机脉冲编码器一侧看沿顺时针方向旋转设定为111,沿逆时针方向旋转设定为-111,要保证主/从电动机方向一致。然后设置主/从电动机参数NO.1817#6为1,使能Tandem控制功能。断电重启,手动低速移动由主/从电动机Tandem 控制的Z轴,将系统显示监控负载画面,观察负载是否正常。
(3)速度反馈平均功能及预加载功能调试 由Tandem控制原理图可知,从动电动机的速度没有得到控制,因此,反向间隙大的机床,从动电动机在齿轮等反向间隙间产生振动而导致运行不稳定,所以使用速度反馈平均功能,通过对从动电动机进行速度控制,即可以使机床稳定。设置参数NO.2008#2为1,使用速度反馈平均功能。
预加载功能通过对于受到位置(速度)反馈控制的扭矩施加偏置,可以在主/从动电动机上外加方向相反的转矩,使其始终处在保持张力的状态,减小主/从动电动机的反向间隙造成的影响。如图3所示,只要在主控轴中将预载值设定为X,在从控轴中将预载值设定为-X,即使在停止中也以预载量的转矩相互牵引。通过参数NO.2087可设定主/从动电动机的预加载力。作为大致标准,设定值等于额定扭矩的1/3左右的值。
此参数的数据单位是(放大器极限)/7282,本机床Z轴放大器极限为80A,3/(80/7282)=273,主控轴侧 = 273,从控轴侧= -273。
设定完预加载力后,手动移动Z轴,观察负载,正方向移动时,主动轴负载大于从动轴负载;负方向移动时,主动轴负载小于从动轴负载;负载值小且对应相等即可。这样Tandem 控制功能就调试完毕了。

图3
其余有关对主控轴进行设定即可的参数、对主控轴和从控轴设定不同数值的参数、对主控轴和从控轴设定相同数据的参数不再罗列。
