CZ9206自动车床改进
2013-10-11李玉全徐世伟关丹丹
李玉全,徐世伟,关丹丹
(1. 哈尔滨哈轴精密轴承制造有限公司,黑龙江 哈尔滨 150036; 2. 哈尔滨轴承集团公司 质量控制部,黑龙江 哈尔滨150036; 3.哈尔滨轴承集团公司 热处理分厂,黑龙江 哈尔滨 150036)
1 前言
CZ9206自动车床主要用于加工外径20~62mm的深沟球轴承和角接触球轴承套圈,可加工内沟、内坡、外沟、外坡和倒角等工序。由于该机床的推料系统存在问题,加工套圈时推料头容易损坏。为解决该问题,对机床的推料装置和电气控制系统进行了改进,效果良好。
2 机床的性能和加工程序
2.1 机床的性能
CZ9206为加工中小型轴承套圈的自动车床,单刀架,具有机电一体化程度高、结构紧凑、工作可靠、刚性强、操作方便、加工零件尺寸分散度小、便于维护、生产效率高、便于多机连线等特点,是轴承加工的理想设备。该机床的外形如图1 所示。

图1 机床外形
2.2 机床的加工程序
当循环启动后YV2(机械手)、YV3(提料油缸)得电,电磁阀换向,机械手送料,提料油缸向下运动。送料到位,压行程开关S1,YV1(夹紧油缸)失电,电磁阀换向,工件被夹紧。经延时YV2失电,机械手送料油缸复位,压合行程开关S2,YV4(刀架纵向油缸)得电,电磁阀换向,刀架纵向油缸前进,碰到行程调速阀后转工进,到位后压合行程开关S3,经延时YV4失电,电磁阀换向,刀架纵向后退,到位后压合行程开关S5,夹具松开,再延时即进入下一次循环。
3 工件加工中存在的问题及改进方法
3.1 推料环存在的问题
机床的送料机构(机械手结构)见图2 所示,弹簧夹具结构见图3 所示。机床启动后,工件经料道落到V形支承上,推料头将工件推到夹具上,夹具夹紧工件,刀具车削工件,车削完毕后夹具松开,工件掉入料道,完成一次循环。

图2 机械手结构

图3 弹簧夹具结构
推料头的原结构见图4 所示,由推料杆1、轴承2、推料环3、螺杆4、螺帽5等组成。螺杆4的端面与推料环3的端面为平面接触,不具备调心功能,当套圈中心与弹簧夹具中心不对中时,推料环送料时工件很容易产生偏斜,导致加工废品并且很容易将推料头、轴承和V形支承损坏。此外,推料环的端面靠近外圆处由很窄的环带组成,推料时也容易将料推偏,造成工件报废。
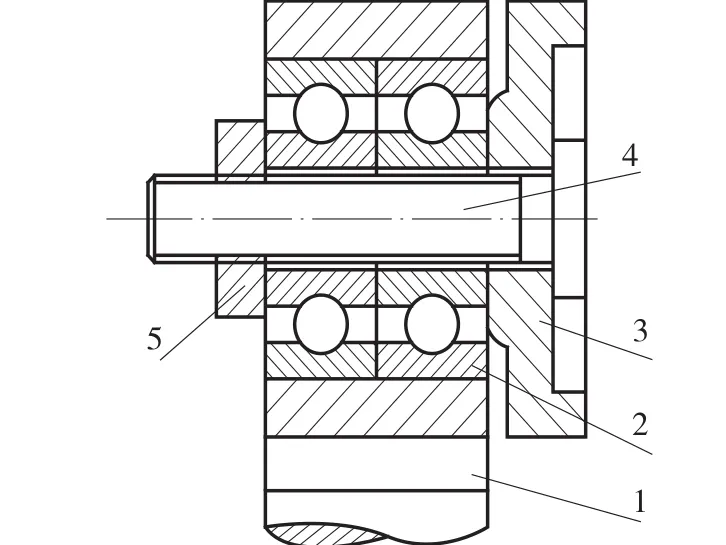
图4 推料头原结构
3.2 改进方法
针对以上存在的问题,对推料头的原结构进行了改进,改进后的推料头的结构见图5 所示。将螺杆4的端面与推料环3的端面为平面接触改为球面接触,具备了调心功能,当套圈中心与弹簧夹具中心不对中时,推料环送料时工件也不产生偏斜,避免了工装损坏。推料环端面的环带也被去除,改成平面,送料时比原来平稳,送料时工件产生偏斜的现象大大减少。

图5 推料头改进后结构
3.3 无料装夹问题
CZ9206为全自动车床,一人操作多台车床。由于操作人员照顾不周或其他原因,造成当机床工作时料道中没有工件的情况,此时,机床仍重复正常的加工动作。当推料环继续以前的送料动作而没有工件可送时,推料环则进入夹头被夹紧。由于推料环靠不上定位环(按设计要求,推料环推动工件靠紧定位环,推料环本身靠不上定位环),所以推料环被弹簧夹具夹紧时极易夹偏,当主轴转动时造成推料头、轴承及V形支承损坏。

图6 机械部分改进
3.4 改进方法
3.4.1 机械部分改进方法
把机床床身上部压住弹簧的盖板铣掉一个Φ11mm的豁口,再做一个长螺丝安装在缺口处以防止盖板转动,在盖板上安装一个触铁,在某处增加一个行程开关S7,S7与紧急按钮SB3并联,起急退的作用,见图6 所示。当V形支承上有工件时,触铁前行碰不上行程开关S7,S7不接通,机床正常工作;当V形支承上没有工件时,触铁前行则压上行程开关S7,S7接通,机械手急退,推料头返回原点,避免了推料头、轴承螺杆及V形支承损坏。
3.4.2 电气部分改进方法
紧急按钮SB3所在的局部电路图如图7 所示。SB3的作用是当有紧急情况发生时,按下SB3,解除循环工作状态,使主轴停转,刀架和机械手退回原点,机床处于初始状态。取一根电线在中间接行程开关S7,与紧急按钮SB3所在的43号线并联,电线的另一端接到电路上。这样,当机床正常工作时,S7不接通,SB3起紧急按钮作用;当机床不正常工作时,即V形支承上没有工件时,S7接通,代替SB3起紧急按钮作用,此时SB3不起作用。

图7 电气控制系统局部改进
4 结束语
机床改造后,运行效果非常理想,至今没有出现过一次损坏推料头、轴承和V形支承的事故,提高了生产效率,避免了经济损失,降低了废品率。
